

نصائح هندسية لدمج الكاميرات ذات المستوى اللوحي
اختيار الواجهة المناسبة لدمج الكاميرا على مستوى اللوحة
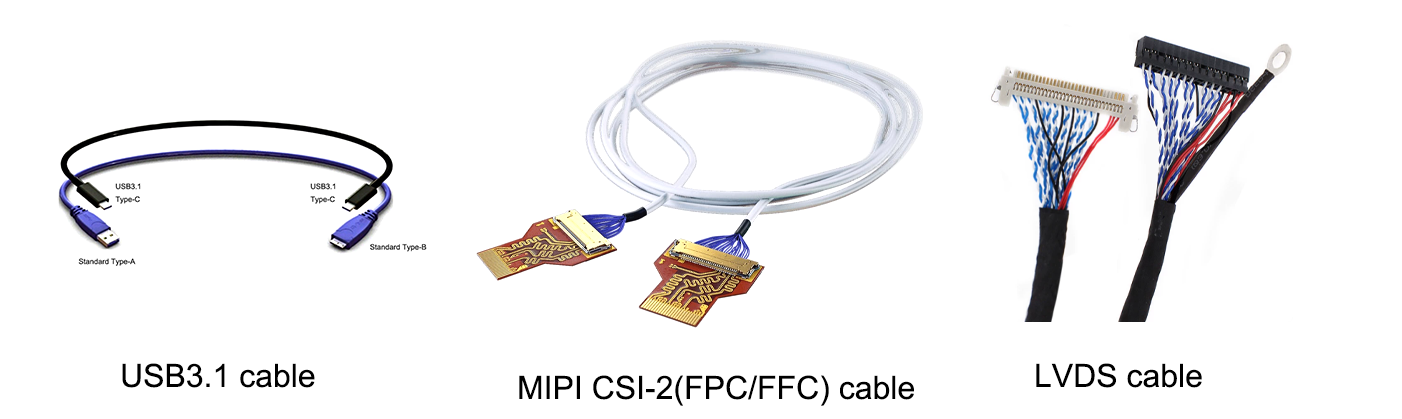
USB 3.1 وMIPI CSI-2 وLVDS: مقايضات العرض الترددي والتأخير والمزامنة الفورية
يواجه مهندسو التضمين قرارات صعبة تتعلق بالمقايضات عند اختيار واجهات دمج الكاميرات على مستوى اللوحة. فتوفر واجهة USB 3.1 عرض نطاق ترددي عالٍ (5 جيجابت في الثانية)، ما يجعلها مناسبة لتدفق الفيديو عالي الدقة، لكنها تُدخل تأخيرًا ناتجًا عن إضافات البروتوكول يتراوح بين ٥ و١٠ ملي ثانية، مما يحد من ملاءمتها للحلقات التحكمية الزمنية الحقيقية. أما واجهة MIPI CSI-2 فتقدم عرض نطاق ترددي قابلاً للتوسّع (حتى ٦ جيجابت في الثانية لكل قناة) ومزامنة مُحفَّزة بواسطة الأجهزة، ما يمكّن من تحقيق تأخير أقل من ملي ثانية وتوقيت دقيق متعدد المستشعرات — وهي مثالية للتشغيل الآلي الصناعي والروبوتات. وتوفّر واجهة LVDS انتقالاً ذا تأخير منخفض جدًّا وقابل للتنبؤ به تمامًا (< ١ ملي ثانية) عبر بروتوكولات تسلسلية بسيطة، رغم أن عرض النطاق الترددي الخاص بكل قناة منها محدودٌ بحوالي ٦٥٥ ميجابت في الثانية، ما يقيّد استخدامها في تدفقات منخفضة الدقة أو المضغوطة. ولأنظمة الرؤية التي تتطلب مزامنة دقيقة جدًّا بين الكاميرات، ينبغي إعطاء الأولوية لواجهة MIPI CSI-2؛ بينما تستفيد التطبيقات الحرجة من حيث السلامة، مثل إدراك المركبات ذاتية القيادة، من قابلية التنبؤ بالتوقيت التي توفرها واجهة LVDS. وتظل واجهة USB 3.1 خيارًا عمليًّا لمراقبة الفيديو عالي الدقة في التطبيقات غير الحرجة زمنيًّا والتي تراعي التكلفة، شريطة أن يكون التأخير الطفيف مقبولًا — بشرط التحقق من القيود الحرارية وقيود المعالجة.
ممارسات تحسين سلامة الإشارة وتصميم لوحات الدوائر المطبوعة (PCB) وفقًا لمبادئ الواجهة
تعد سلامة الإشارة محددة وفقًا للواجهة وتُشكّل الأساس لأداء الكاميرا على مستوى اللوحة بشكلٍ موثوق. وبالنسبة واجهة USB 3.1، يجب الحفاظ على مقاومة تفاضلية قدرها ٩٠ أوم مع أزواج متطابقة في الطول (±٥ ميل)، وتوجيه المسارات مع درع أرضي، والفصل الصارم عن المسارات الرقمية المسببة للتداخل لقمع التداخل الكهرومغناطيسي (EMI). أما واجهة MIPI CSI-2 فتتطلب مقاومة تفاضلية قدرها ١٠٠ أوم لكل قناة تفاضلية، ومطابقة الطول ضمن حدود ±١٠ ميل، وتجنب استخدام الثقوب الانتقالية (vias) بالقرب من المستقبلات — وهي ممارسة بالغة الأهمية خصوصًا بالنسبة للقنوات عالية السرعة العاملة عند سرعات تفوق ١,٥ جيجابت في الثانية. أما تصاميم واجهة LVDS فتتطلب أطوال مسارات قصيرة (<١٠ بوصات)، ومقاومة تفاضلية ثابتة قدرها ١٠٠ أوم، ومسارات حماية (guard traces) لقمع التداخل بين المسارات (crosstalk). وعلى امتداد جميع الواجهات، ينبغي تقسيم مستويات الأرض (ground planes) لعزل الدوائر التناظرية الخاصة بالمستشعر عن مجالات معالج الإشارات الرقمية (ISP) والمعالجات الرقمية، وتركيب المكثفات المزيلة للتشويش (decoupling capacitors) على بُعد لا يتجاوز ٢ مم من دبابيس التغذية، واستخدام تراكيب طبقات تتضمن ٤ طبقات أو أكثر مع مستويات مرجعية متواصلة. ويعزى ٣٢٪ من التشوهات البصرية في أنظمة الرؤية النموذجية إلى التوجيه غير الصحيح للمسارات — ما يجعل المحاكاة بعد إنجاز التخطيط (post-layout simulation) والتحقق من المقاومة التفاضلية أمراً لا غنى عنه في التصاميم الحرجة للمهام.
التكامل الميكانيكي: تركيب العدسة والمرونة البصرية
يُعد تثبيت العدسة بدقة أمراً جوهرياً: فالمشاهدات غير المحاذية بمقياس الميكرون تؤدي إلى انحراف في البؤرة، أو تشويه في الصورة، أو فقدان في الدقة. ويجب على المهندسين تحقيق توازن بين الصلابة الميكانيكية—وهي أمرٌ بالغ الأهمية لمقاومة الصدمات والاهتزازات—والقابلية للضبط الميداني، والتي تحقَّق عادةً عبر أنابيب مُسنَّنة أو عبر وحدات تثبيت تعتمد على الصفائح الرقيقة (Shims). وتتطلب المرونة البصرية التوافق مع مختلف أنواع العدسات (الثابتة البؤرة، المتغيرة البؤرة، السائلة)، وكذلك دعم ضبط الطول البؤري عبر آليات حلزونية أو وحدات تحكم كهروميكانيكية مُحرَّكة. أما عدم التطابق في معامل التمدد الحراري بين العدسات وأجهزة الاستشعار فيتطلّب اتخاذ إجراءات وقائية—مثل استخدام مواد ذات معامل تمدد حراري منخفض (مثل سبيكة الإنفار أو المواد السيراميكية المركبة) أو وحدات التثبيت الحركية (Kinematic Mounts)—وخاصةً في البيئات الصناعية (من -٤٠°م إلى +٨٥°م). وفي تطبيقات التصوير بالأشعة تحت الحمراء أو التصوير متعدد الأطياف، يصبح شفافِيَّة مادة القاعدة في النطاق الطيفي المستهدف قيداً تصميمياً أولياً (مثل الجرمانيوم للأشعة تحت الحمراء البعيدة LWIR، أو الكوارتز المنصهر للأشعة فوق البنفسجية UV). كما تتيح واجهات العدسات الوحدوية استبدال العدسات بسرعة دون الحاجة إلى إعادة معايرة كاملة، لكن يجب ألا تتجاوز التسامحات المسموحة للمسافة بين سطح التثبيت (Flange Distance) ١٠ ميكرومتر لتفادي ظاهرة التعتيم الحادّ (Vignetting) أو تدهور دالة انتقال التباين (MTF).

ضمان التوافق القوي على مستوى النظام في تصاميم الكاميرات المُركَّبة على اللوحة
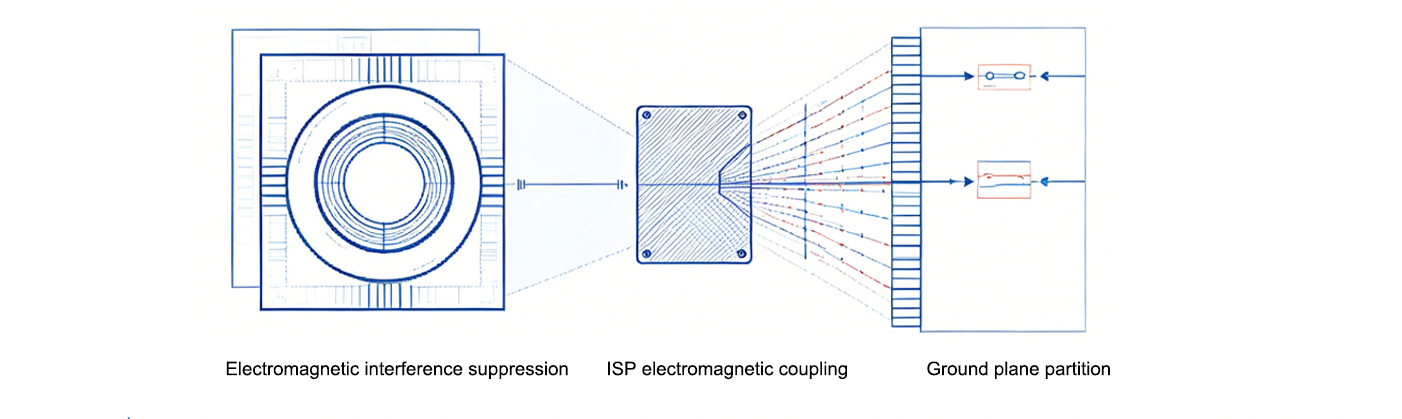
التخفيف من التداخل الكهرومغناطيسي وتقسيم مستوى الأرض لتمكين التوافق بين المستشعر ووحدة معالجة الإشارات الرقمية (ISP)
تفتقر تصاميم الكاميرات على مستوى اللوحة الإلكترونية (بدون غلاف) إلى درع الحماية من التداخل الكهرومغناطيسي (EMI) المتوفر في الوحدات المغلَّفة، ما يُلقي عبئًا أكبر على العزل على مستوى لوحة الدوائر المطبوعة (PCB) بين مستشعرات الصور ووحدات معالجة الإشارات البصرية (ISP). وتُعدّ مخططات الطبقات الأرضية المجزَّأة—التي تفصل بين النطاقات التناظرية للمستشعرات والنظم الفرعية الرقمية لوحدة معالجة الإشارات البصرية (ISP)—ضروريةً لتقليل اقتران الضوضاء المنقولة، إذ يمكن أن يتسبّب التداخل في الدوائر المختلطة (Mixed-signal) في إدخال توافقيات الساعة التي تتجاوز ٥٠ ديسيبل ميكرو فولت/متر (IEC 61000-4-3). ومن الاستراتيجيات الفعّالة: التأريض بنقطة نجمية عند نقطة دخول التغذية الكهربائية، ومسارات حماية (Guard traces) مزودة بثقوب توصيل (Stitching vias) حول الشبكات الرقمية عالية السرعة، وتجنّب استخدام أشكال التبريد الحراري (Thermal reliefs) في صبات الطبقات الأرضية القريبة من المستشعرات، وإضافة حبات فيريت (Ferrite beads) على خطوط ساعة ناقل I²C. وتنخفض جودة الإشارة بسرعةٍ كبيرةٍ عندما يقلّ المسافة بين المستشعر ووحدة معالجة الإشارات البصرية (ISP) عن ثلاثة أضعاف طول الموجة (3λ) لأعلى تردد تشغيلي—مما يستدعي توجيه المسارات مع التحكم في المعاوقة (Impedance-controlled routing) وأزواج الخطوط التفاضلية ذات الأطوال المتطابقة (Matched-length differential pairs). ويُمكن تحديد النقاط الساخنة مبكرًا خلال مرحلة النماذج الأولية باستخدام مجسّات التداخل الكهرومغناطيسي قريبة المجال (Near-field EMI probes) ذات المسافة الفاصلة ٥ مم؛ بينما يؤدي وضع درع موضعي من سبيكة الميوز-ميتال (Mu-metal) فوق المستشعرات إلى خفض الانبعاثات المشعّة بنسبة ١٢–١٨ ديسيبل (FCC OET-65). كما أن الحفاظ على مسافة فاصلة لا تقلّ عن ٤٠ ميل بين النطاقات المختلطة للإشارات يحسّن نسبة الإشارة إلى الضوضاء (SNR) بشكلٍ ثابتٍ بنسبة ٢٠٪ في الوحدات عالية الدقة.
تكامل البرمجيات وقابلية نقل واجهة برمجة التطبيقات (SDK) لكاميرات مستوى اللوحة
دعم التعريفات عبر الأنظمة الأساسية: لينكس في الزمن الحقيقي (Linux RT)، ونظام QNX، وأنظمة التشغيل الزمنية الحقيقية الخفيفة (Bare-Metal RTOS) مع إطار عمل Spinnaker
تُعد قابلية نقل البرمجيات عبر الأنظمة الأساسية أمراً لا غنى عنه في عمليات النشر الخاصة بالرؤية المدمجة التي تشمل أنظمة Linux ذات الزمن الحقيقي (RT)، ونظام QNX، والبيئات المُجرَّدة من نظام التشغيل ذي القيود الشديدة على الموارد (bare-metal RTOS). ويفرض كل نظام تشغيل متطلباتٍ مختلفةً فيما يتعلّق بالزمن والذاكرة ونماذج التعريفات — ومع ذلك يجب الحفاظ على اكتساب البكسل بدقة مطلقة والتناسق المُحفَّز بواسطة العتاد. وتُسدّ هذه الفجوة طبقة تجريد موحدة لمجموعة أدوات التطوير البرمجي (SDK): فعلى سبيل المثال، توفر مجموعة أدوات Spinnaker SDK واجهات برمجية معيارية عبر منصات x86 وARM وRISC-V، مع دعمها الأصلي لالتقاط الإطارات في الزمن الحقيقي، والتشغيل المُحفَّز بواسطة العتاد، والوصول إلى سجلات وحدة معالجة الإشارات الرقمية (ISP). وبذلك تختفي الحاجة إلى تطوير تعريفات زائدة عند الانتقال من أجهزة الحاسوب الصناعية القائمة على نظام Linux ذات الزمن الحقيقي إلى الأهداف القائمة على وحدات التحكم الدقيق (microcontroller) والخاصة بأنظمة التشغيل ذات الزمن الحقيقي. وباستخدام الفِرق لهذه الإطارات المرجعية، تنخفض مدة التكامل بنسبة تصل إلى ٤٠٪، مع الحفاظ على السلوك المحدَّد بدقة — حتى في ظل ظروف خفض الأداء الحراري أو تقليل الجهد.
هل أنتم مستعدون لتبسيط عملية دمج كاميرات المستوى اللوحي في إنتاج المصنّعين الأصليين (OEM)؟
غير ملحوم دمج كاميرات المستوى اللوحي يُعَدُّ هذا العنصر حجر الزاوية في أنظمة الرؤية المُضمَّنة الموثوقة عالية الأداء؛ فلن تتمكن أية خوارزمية متقدمة أو أجهزة معالجة من التغلب على سوء اختيار الواجهة، أو عيوب سلامة الإشارة، أو التصميم الميكانيكي غير المُحسَّن. وباتِّباع أفضل الممارسات المُثبتة ميدانيًّا في التكامل، والشراكة مع مورِّد كاميرات يوفِّر أجهزةً مُحقَّقة مسبقًا، ودعم تصاميم مرجعية، وأدوات برمجية تعمل عبر المنصات، فإنك ستقلِّل من عدد مراحل التصميم التكرارية، وتسارع من الوقت اللازم للوصول إلى السوق، وتُفعِّل أداءً ثابتًا وفعالًا من حيث التكلفة في إنتاج الشركات المصنِّعة للمعدات الأصلية (OEM) بالكميات الكبيرة.
للحصول على حلول كاميرات مستوى اللوحة من الفئة الصناعية المصممة خصيصًا لتطبيق الرؤية المدمجة الخاص بك، أو للوصول إلى حزم التصاميم المرجعية الكاملة، ودعم الهندسة الداخلي، وخدمات التصنيع المخصصة لمصنّعي المعدات الأصلية (كما تقدمها شركة HIFLY)، فعليك الشراكة مع مزودٍ يتمتّع بخبرة راسخة في مجال الرؤية الآلية الصناعية. وتمتد خبرة HIFLY التي تبلغ ١٥ عامًا لتشمل تصميم الكاميرات على مستوى اللوحة، والتخصيص الكامل لمصنّعي المعدات الأصلية/مصنّعي التصميم الأصلي (OEM/ODM)، والتكامل الشامل لأنظمة الرؤية المدمجة من البداية حتى النهاية— وهي خبرة مدعومة باعتماد ISO 9001:2015، ودعم الامتثال التنظيمي العالمي، وخدمات هندسة الدعم الفني المخصصة أثناء مرحلة التصميم. اتصل بنا اليوم للحصول على استشارة غير ملزمة، أو لإنشاء نموذج أولي مخصص، أو لتحسين سير عملك الخاص بدمج كاميرات مستوى اللوحة.





