

সঠিক লাইন স্ক্যান ক্যামেরা নির্বাচনের টিপস
লাইন স্ক্যান ক্যামেরা সম্পর্কিত মৌলিক ধারণা: স্থাপত্য, নীতি এবং প্রধান সুবিধাসমূহ
লাইন স্ক্যান ইমেজিং কীভাবে এরিয়া স্ক্যান থেকে ভিন্ন—গতিজনিত ধূসরতা (মোশন ব্লার) দূর করে অসীম উল্লম্ব রেজোলিউশন সক্ষম করে
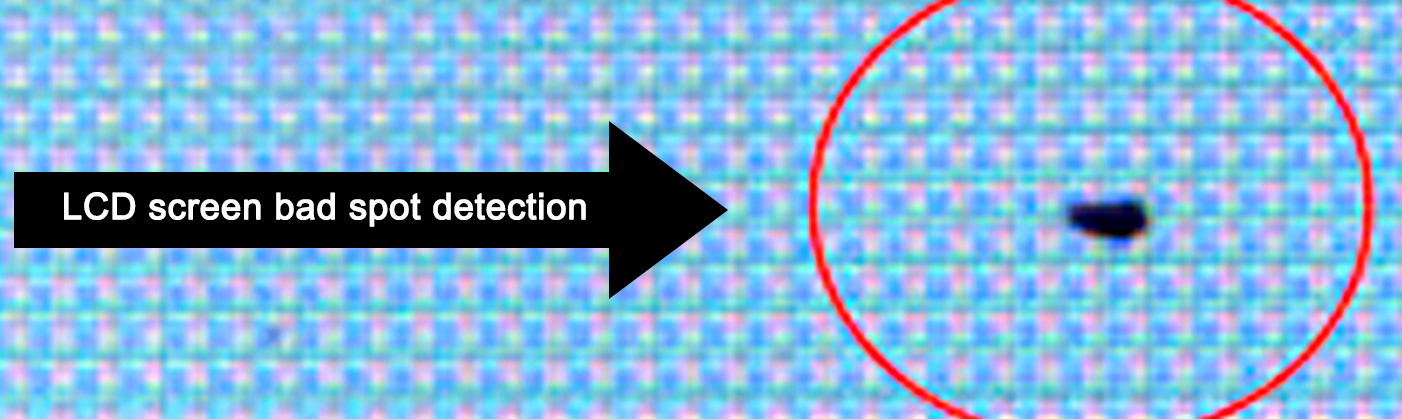
এরিয়া স্ক্যান ক্যামেরা গুলি একসাথে সম্পূর্ণ 2D ছবি তোলে, অন্যদিকে লাইন স্ক্যান ক্যামেরা গুলি ভিন্নভাবে কাজ করে। এদের মধ্যে শুধুমাত্র একটি পিক্সেল লাইন থাকে, যা বস্তুগুলি ক্যামেরার দৃশ্যের উপর দিয়ে অতিক্রম করার সময় ধীরে ধীরে ছবি গঠন করে। সিস্টেমটি ঘূর্ণন বা রৈখিক এনকোডারের মতো যন্ত্রপাতির সাহায্যে গতির সঙ্গে সিঙ্ক্রোনাইজ করে, ফলে বস্তুগুলি খুব দ্রুত গতিতে—কখনও কখনও প্রতি সেকেন্ডে ১০ মিটারের বেশি—চলাচল করলেও ছবিতে কোনও ঝাপসা হওয়া হয় না। এখানে যা সবচেয়ে গুরুত্বপূর্ণ, তা হলো উল্লম্ব রেজোলিউশন মূলত অসীম পর্যন্ত বৃদ্ধি পেতে পারে। ছবিটি কতটা উঁচু হবে, তা সম্পূর্ণরূপে নির্ভর করে কোনও বস্তু ক্যামেরার সামনে দিয়ে কতটা দূরত্ব অতিক্রম করছে তার উপর, আর এটি সেন্সরের আকার দ্বারা সীমিত নয়। এই কারণে, লাইন স্ক্যান প্রযুক্তি অর্ধপরিবাহী উৎপাদনের সময় তাদের পরীক্ষা করা বা ৩,০০০ মিমি চওড়া বিশাল ধাতব কয়েলগুলি ট্র্যাক করা—এমন সূক্ষ্ম কাজে অত্যন্ত কার্যকর। ঐতিহ্যগত এরিয়া স্ক্যান সিস্টেমগুলি এই ধরনের পরিস্থিতিতে হয় বিশাল আকারের স্টিচড ছবি তৈরি করে, অথবা প্রক্রিয়ার মধ্যে গুরুত্বপূর্ণ বিবরণ হারিয়ে ফেলে, যার ফলে এগুলি এই কাজগুলি সঠিকভাবে সম্পাদন করতে পারে না।
কোর কম্পোনেন্টগুলি ব্যাখ্যা করা হয়েছে: লিনিয়ার সেন্সর, লাইন রেট ইঞ্জিন, এনকোডার ইন্টারফেস এবং রিয়েল-টাইম সিঙ্ক্রোনাইজেশন লজিক
চারটি পরস্পর-নির্ভরশীল কম্পোনেন্ট এই নির্ভুলতা সক্ষম করে:
- লাইনিয়ার সেন্সর , সাধারণত ১–১৬k অ্যাকটিভ পিক্সেল সহ CMOS বা CCD অ্যারে, যা আনুভূমিক রেজোলিউশন এবং স্পেকট্রাল রেসপন্স নির্ধারণ করে।
- লাইন রেট ইঞ্জিন পিক্সেল ডেটা প্রক্রিয়া করে ১০–১৪০ kHz হারে, যা বস্তুর গতিবেগের সাথে নমনীয়ভাবে নমুনা গ্রহণ ফ্রিকোয়েন্সিকে মিলিয়ে দেয়।
- এনকোডার ইন্টারফেস যান্ত্রিক গতিকে নির্ভুল ট্রিগার সিগন্যালে রূপান্তরিত করে—কোয়াড্রাচার ডিকোডিংয়ের মাধ্যমে ±০.০১% গতি সিঙ্ক্রোনাইজেশন অর্জন করে।
- রিয়েল-টাইম সিঙ্ক্রোনাইজেশন লজিক কম্পন-জনিত জিটার বা ক্ষণস্থায়ী গতি পরিবর্তনের প্রভাব প্রশমিত করে, অবিরত স্ক্যানগুলিতে সাব-পিক্সেল রেজিস্ট্রেশন বজায় রাখে।
একসাথে, এই উপাদানগুলি সিলিন্ড্রিক্যাল পৃষ্ঠ, অবিরাম ওয়েব এবং তাপীয়ভাবে অস্থিতিশীল উপকরণগুলির বিকৃতিমুক্ত ইমেজিং সমর্থন করে—যা এরিয়া-ভিত্তিক আর্কিটেকচারগুলির জন্য মৌলিকভাবে অপ্রাপ্য।
লাইন রেট, গতির গতিবিধি এবং স্থানিক রেজোলিউশনের নির্ভুল মিলিং
নিয়ন্ত্রক সমীকরণ: Δx = v / fline—এবং পিক্সেল-টু-মিমি ক্যালিব্রেশনের জন্য এটি কীভাবে প্রয়োগ করতে হয়
লাইন স্ক্যান ইমেজিং-এ সঠিক স্থানিক পরিমাপ পাওয়ার জন্য বস্তুর গতি (v) এবং ক্যামেরার লাইন রেট (fline) এর মধ্যে সঠিক সমন্বয় অত্যন্ত গুরুত্বপূর্ণ। এই প্রক্রিয়ার মূলে রয়েছে একটি মৌলিক সূত্র: Δx = v / fline, যা প্রতিটি পিক্সেল দ্বারা প্রতিনিধিত্বকৃত প্রকৃত দূরত্ব নির্দেশ করে। ধরুন, আমরা একটি কনভেয়ার বেল্ট পর্যবেক্ষণ করছি যা প্রতি সেকেন্ডে ৫০০ মিলিমিটার গতিতে চলছে এবং আমাদের ক্যামেরা ১০ কিলোহার্টজে সেট করা হয়েছে। এই গণনা অনুযায়ী, প্রতি পিক্সেলের রেজোলিউশন হয় প্রায় ০.০৫ মিলিমিটার। এই সিস্টেমগুলি ক্যালিব্রেট করার সময়, নির্ভরযোগ্য বেগ পরিমাপ পাওয়া খুবই গুরুত্বপূর্ণ। এই উদ্দেশ্যে অধিকাংশ লোক লেজার ডপলার ভেলোসিমিটার ব্যবহার করেন এবং তারপর পছন্দসই Δx মান অর্জন করার জন্য লাইন রেট সামঞ্জস্য করেন। এবং বিচ্যুতির প্রতি সতর্ক থাকুন। যদি বিচ্যুতি ±২% এর বেশি হয়, তবে গুরুত্বপূর্ণ অ্যাপ্লিকেশনগুলিতে—যেমন প্রিন্টেড সার্কিট বোর্ডের ট্রেসের প্রস্থ পরীক্ষা করার সময়, যেখানে নির্ভুলতা সর্বোচ্চ গুরুত্ব বহন করে—তখন ত্রুটিগুলি প্রকট হতে শুরু করে।
এনকোডার-ভিত্তিক সিঙ্ক্রোনাইজেশন: উচ্চ-কম্পন বা পরিবর্তনশীল-গতির পরিবেশে সাব-পিক্সেল রেজিস্ট্রেশন নিশ্চিত করা
যখন মেশিনগুলি কম্পিত হয় বা তাদের গতি অপ্রত্যাশিতভাবে পরিবর্তিত হয়, তখন এটি সময়বিন্যাসের সমস্যা সৃষ্টি করে যা ছবিগুলিকে কম তীব্র করে এবং পরিমাপগুলিকে ধারাবাহিকভাবে পুনরায় করা কঠিন করে তোলে। এনকোডারকে গতি সিস্টেমের অবস্থান ফিডব্যাকের সাথে সিঙ্ক্রোনাইজ করে, আমরা ছবিগুলি কখন ধারণ করা হবে তা নির্দিষ্ট করে দিতে পারি। এর অর্থ হলো, এমনকি গতি ১৫% পর্যন্ত পরিবর্তিত হলেও আমরা গুণগত নিয়ন্ত্রণের জন্য যে সূক্ষ্ম-পিক্সেল স্তরের রেজিস্ট্রেশন প্রয়োজন হয়, তা পাওয়া যায়। সংখ্যাগুলিও নিজেই কথা বলে— ঘূর্ণন এনকোডারগুলি ০.০০১ ডিগ্রি পর্যন্ত কোণ পরিমাপ করতে পারে, অন্যদিকে রৈখিক এনকোডারগুলি মাত্র ১ মাইক্রোমিটারের মধ্যে অবস্থান ট্র্যাক করতে পারে। এই ক্ষমতাগুলি কঠিন শিল্প পরিবেশে সমস্ত পার্থক্য তৈরি করে। উদাহরণস্বরূপ, স্টিল মিলগুলি যেখানে সবকিছু ধ্রুবভাবে কম্পিত হয় বা টেক্সটাইল কারখানাগুলি যেখানে টান মুহূর্তে মুহূর্তে পরিবর্তিত হয়। উপযুক্ত এনকোডার সিঙ্ক্রোনাইজেশন সহ, সিস্টেমগুলি প্রকৃত ত্রুটিগুলি ধরতে পারে, ভুলবশত ভালো পণ্যগুলিকে বাতিল করার পরিবর্তে। গবেষণায় দেখা গেছে যে, এই পদ্ধতি তুলনামূলকভাবে পুরনো পদ্ধতির তুলনায় ভুল প্রত্যাখ্যান প্রায় ৪০% কমিয়ে দেয়, যেখানে কোনো ট্রিগার পয়েন্ট ছাড়াই সিস্টেমগুলি স্বাধীনভাবে চালানো হতো।

অ্যাপ্লিকেশন-চালিত সাধারণ শিল্প ব্যবহারের ক্ষেত্রে নির্বাচনের মাপদণ্ড
ওয়েব পরীক্ষা: টানের পরিবর্তন, সেলাইয়ের অবিচ্ছিন্নতা এবং রিয়েল-টাইমে ত্রুটির অবস্থান নির্ণয় পরিচালনা
কাগজ, প্লাস্টিকের ফিল্ম, ধাতব ফয়েল বা কাপড়ের মতো চিরায়িত ওয়েব উপকরণগুলির সাথে কাজ করার সময়, উৎপাদন লাইনে সঠিক লাইন স্ক্যান ক্যামেরা নির্বাচন করা হয় তিনটি প্রধান বিবেচনার উপর ভিত্তি করে। প্রথম চ্যালেঞ্জটি প্রক্রিয়াজাতকরণের সময় টানের পরিবর্তনের কারণে গতির পরিবর্তনের সাথে সম্পর্কিত। এই সমস্যা সমাধানের জন্য সিস্টেমগুলিতে কমপক্ষে ২০ কিলোহার্টজ ফ্রিকোয়েন্সিতে চালিত হওয়া অ্যাডাপ্টিভ কন্ট্রোলার এবং এনকোডার ফিডব্যাক লুপ প্রয়োজন, যাতে ছবিগুলি ওয়েবের সম্পূর্ণ প্রস্থ জুড়ে পিক্সেল-বাই-পিক্সেল সঠিকভাবে সমশ্রেণীবদ্ধ থাকে। দ্বিতীয়ত, লাইনগুলির মধ্যে ফাঁক না রেখে ছবিগুলি সঠিকভাবে সংযুক্ত করা হয় পিক্সেল অ্যারেগুলির সাবধানতাপূর্ণ ওভারল্যাপ দ্বারা। নির্মাতারা চূড়ান্ত পরীক্ষা-নিরীক্ষার ফলাফলে অবিচ্ছিন্নতা বজায় রাখতে সাধারণত এক মাইক্রোসেকেন্ডের চেয়ে ভালো সিঙ্ক্রোনাইজেশন লক্ষ্য করেন। তৃতীয়ত, ত্রুটিগুলি ঘটার সময়েই সনাক্ত করা নির্ভর করে ক্যামেরার অনবোর্ড প্রসেসিং ক্ষমতার উপর। অনেক আধুনিক সিস্টেম এখন থ্রেশহোল্ড ডিটেকশনের মতো মৌলিক ছবি বিশ্লেষণ কাজগুলি ত্বরান্বিত করতে FPGA চিপ ব্যবহার করে, যার ফলে পণ্যগুলি বাতিল হওয়ার আগেই মাত্র পাঁচ মিলিসেকেন্ডের মধ্যে সমস্যাগুলি চিহ্নিত করা সম্ভব হয়। ২০২৩ সালের সাম্প্রতিক গবেষণায় দেখা গেছে যে, এলাকা স্ক্যান থেকে লাইন স্ক্যান প্রযুক্তিতে রূপান্তরিত হওয়ায় লাইন গতি আট মিটার প্রতি সেকেন্ড হওয়ার সময় ত্রুটি সনাক্তকরণ হার প্রায় ৯২% বৃদ্ধি পেয়েছে, যা ব্যাখ্যা করে কেন এই দিনগুলিতে আরও বেশি কনভার্টার এই রূপান্তরটি করছেন।
সিলিন্ড্রিক্যাল অংশ স্ক্যানিং: কোণিক রেজোলিউশন ম্যাপিং, রোটারি এনকোডার সমায়ন, এবং ফিল্ড অফ ভিউ (FOV) বিকৃতির সম্ভাব্য সমস্যা
বোতল, বেয়ারিং অথবা গাড়ির শ্যাফটের মতো ঘূর্ণায়মান উপাদানগুলির সাথে কাজ করার সময় কোণিক রেজোলিউশন সঠিক সেন্সর নির্বাচনে একটি প্রধান ভূমিকা পালন করে। মৌলিক সূত্রটি এরকম হয়: N = π × ব্যাস ÷ (RPM × 60 × প্রয়োজনীয় স্থানিক রেজোলিউশন)। এই সংখ্যাগুলি সঠিকভাবে নির্ধারণ করা গুরুত্বপূর্ণ, কারণ ভুলভাবে সমায়িত রোটারি এনকোডারগুলি সমস্যা সৃষ্টি করতে পারে। প্রায় অর্ধেক সময় এই অসমায়নগুলি ১৫% এর বেশি ব্যাসার্ধীয় বিকৃতি সৃষ্টি করে, তাই অনেক প্রযুক্তিবিদ প্রথমে কোয়াড্রাচার সিগন্যাল ব্যবহার করে তাদের সেটআপ পরীক্ষা করেন। আরেকটি বিষয় যা লক্ষ্য রাখা উচিত তা হলো আলোকিক বিকৃতি। সাধারণ লেন্সগুলি বক্র প্রান্তগুলিতে ছবিগুলিকে বিকৃত করে, যাকে 'ব্যারেল বিকৃতি' বলা হয়। এই কারণে কিছু অ্যাপ্লিকেশনে পূর্ণ দৃশ্য ক্ষেত্র জুড়ে পরিমাপের ত্রুটি ০.১% এর নিচে রাখার জন্য টেলিসেন্ট্রিক অপটিক্সে রূপান্তরিত হয়। যেখানে গাড়ির শ্যাফট পরীক্ষার সময় ঝলসানো (গ্ল্যার) একটি সমস্যা, সেখানে ৮-বিট থেকে ১২-বিট সেন্সরে রূপান্তর বড় পার্থক্য তৈরি করে। অধিকাংশ দোকান রিপোর্ট করে যে তারা আপগ্রেড করলে ভুল পাঠ প্রায় ৭০% হ্রাস পায়, যদিও ফলাফলগুলি নির্দিষ্ট পরিস্থিতির উপর নির্ভর করে পরিবর্তিত হতে পারে।
লাইন স্ক্যান ক্যামেরা বনাম এরিয়া স্ক্যান ক্যামেরা: সর্বোত্তম ROI অর্জনের জন্য কখন কোনটি বেছে নেবেন
পাঁচটি সিদ্ধান্তমূলক পরিস্থিতি যেখানে লাইন স্ক্যান ক্যামেরা অতুলনীয় কার্যকারিতা ও খরচ-দক্ষতা প্রদান করে
যদিও এরিয়া স্ক্যান ক্যামেরাগুলি আলাদা, স্থির বা কম গতিসম্পন্ন বস্তুর জন্য এখনও সর্বোত্তম বিকল্প হিসেবে বিবেচিত হয়, লাইন স্ক্যান প্রযুক্তি পাঁচটি উচ্চ-আয়তনের শিল্প প্রেক্ষাপটে উৎকৃষ্ট কার্যকারিতা—এবং শক্তিশালী ROI—প্রদান করে:
- উচ্চ-গতির ওয়েব পরীক্ষা (কাগজ, ফয়েল, ফিল্ম), যেখানে গতিজনিত ধূসরতা (মোশন ব্লার) এরিয়া স্ক্যানের নির্ভুলতা কমিয়ে দেয়; লাইন স্ক্যান ৭০ কিলোহার্জের বেশি গতিতে বিকৃতিমুক্ত ১ডি স্লাইস ধারণ করে, যা কিলোমিটার-স্কেলের নিরবচ্ছিন্ন ইমেজিং সক্ষম করে।
- ধাতব স্ট্রিপ মনিটরিং গরম রোলিংয়ের সময়, যেখানে তাপীয় ড্রিফ্ট এবং কাঠামোগত কম্পন সাব-পিক্সেল রেজিস্ট্রেশন বজায় রাখতে এনকোডার-সিঙ্ক্রোনাইজড অ্যাকুইজিশন প্রয়োজন।
- টেক্সটাইল উৎপাদন যেখানে কাপড়ের লোচনশীলতা এবং টানের পরিবর্তনশীলতা রিয়েল-টাইম পিক্সেল ক্যালিব্রেশনের মাধ্যমে নিয়ন্ত্রণ করা হয়—বহু-ক্যামেরা ভিত্তিক এরিয়া স্ক্যান সেটআপে সহজেই ঘটে যাওয়া স্টিচিং আর্টিফ্যাক্টগুলি এড়ানো হয়।
- ঘূর্ণায়মান সিলিন্ড্রিক্যাল অংশের ৩৬০° পরীক্ষা যেখানে কোণিক রেজোলিউশন ম্যাপিং ২,০০০ আরপিএম-এর উপরে গতিতে মাইক্রন-স্তরের ত্রুটি সনাক্তকরণ সক্ষম করে।
- বৃহৎ-অঞ্চল স্ক্যানিং (সৌর প্যানেল, মহাকাশ কম্পোজিট), যেখানে লাইন স্ক্যান বহু-ক্যামেরা সামঞ্জস্য ও ক্যালিব্রেশনের খরচপূর্ণ ওভারহেড এড়াতে সাহায্য করে।
এই অ্যাপ্লিকেশনগুলিতে, লাইন স্ক্যান সিস্টেমগুলি হার্ডওয়্যার ও ইন্টিগ্রেশন খরচ ৩০–৬০% পর্যন্ত কমায়, এবং এরিয়া স্ক্যান সিস্টেমে গতি-সম্পর্কিত আর্টিফ্যাক্টের কারণে যে ভুল প্রত্যাখ্যানগুলি ঘটে থাকে তা প্রায় ১৫% পর্যন্ত কমায়। উচ্চ-আউটপুট উৎপাদন পরিবেশে এদের স্কেলযোগ্যতা এবং একক-সেন্সর আর্কিটেকচার ৮–১২ মাসের মধ্যে রিটার্ন অন ইনভেস্টমেন্ট (ROI) প্রদান করে।

আপনার শিল্প অ্যাপ্লিকেশনের জন্য সঠিক লাইন স্ক্যান ক্যামেরা নির্বাচনের জন্য প্রস্তুত?
সঠিক লাইন স্ক্যান ক্যামেরা বিশ্বস্ত, উচ্চ-গতির শিল্প পরিদর্শনের ভিত্তি—কোনো অ্যালগরিদম বা সফটওয়্যার আপনার লাইন গতি, রেজোলিউশন প্রয়োজন বা উৎপাদন পরিবেশের সাথে অসামঞ্জস্যপূর্ণ ক্যামেরার জন্য ক্ষতিপূরণ দিতে পারে না। লাইন রেট, সেন্সর রেজোলিউশন, এনকোডার সিঙ্ক্রোনাইজেশন এবং অপটিক্যাল ডিজাইনকে আপনার নির্দিষ্ট অ্যাপ্লিকেশনের সাথে সামঞ্জস্য করে নেওয়ার মাধ্যমে, আপনি আপনার উৎপাদন প্রক্রিয়ার জন্য বিচ্ছিন্নতাহীন, মাইক্রন-সঠিক পরীক্ষা, ভুল প্রত্যাখ্যানের হ্রাস এবং পরিমাপযোগ্য রিটার্ন অন ইনভেস্টমেন্ট (ROI) আনলক করুন।
ওয়েব পরীক্ষা, সিলিন্ড্রিক্যাল স্ক্যানিং বা বৃহৎ-বিন্যাসের ইমেজিং অ্যাপ্লিকেশনের জন্য শিল্প-মানের লাইন স্ক্যান ক্যামেরা সমাধান বা HIFLY-এর প্রস্তাবিত পরিপূরক আলোকবিদ্যা, লেন্স এবং এনকোডার সিঙ্ক্রোনাইজেশন টুলস সহ সম্পূর্ণ একীভূত মেশিন ভিশন সিস্টেম তৈরি করতে, শিল্প-মানের মেশিন ভিশন বিশেষজ্ঞতার গভীর মূল থাকা একটি প্রদানকারীর সাথে অংশীদারিত্ব করুন। HIFLY-এর ১৫ বছরের অভিজ্ঞতা অত্যধিক গতির ১০ গিগাবাইট ইথারনেট ৮K লাইন স্ক্যান ক্যামেরা, বহু-বর্ণালী ইমেজিং সিস্টেম এবং শেষ থেকে শেষ শিল্প পরীক্ষা সমাধানের উপর বিস্তৃত—যা ISO ৯০০১:২০১৫ সার্টিফিকেশন, ৩০টির বেশি আবিষ্কার পেটেন্ট এবং ৩০টির বেশি দেশে ২,৫০০+ ক্লায়েন্টের সমর্থন দ্বারা সমর্থিত। আজই আমাদের সাথে যোগাযোগ করুন, আপনার প্রক্রিয়ার জন্য সঠিক লাইন স্ক্যান ক্যামেরা নির্বাচনের জন্য কোনো বাধ্যবাধকতা ছাড়া পরামর্শের জন্য।





