

Rozdíl mezi kamerami pro snímání ploch a kamerami pro řádkové snímání
Plošné kamery a řádkové kamery mají významné rozdíly v principu zobrazení, aplikačních scénářích atd., a to následující:
1. Zásadní rozdíly: struktura a metoda zobrazení
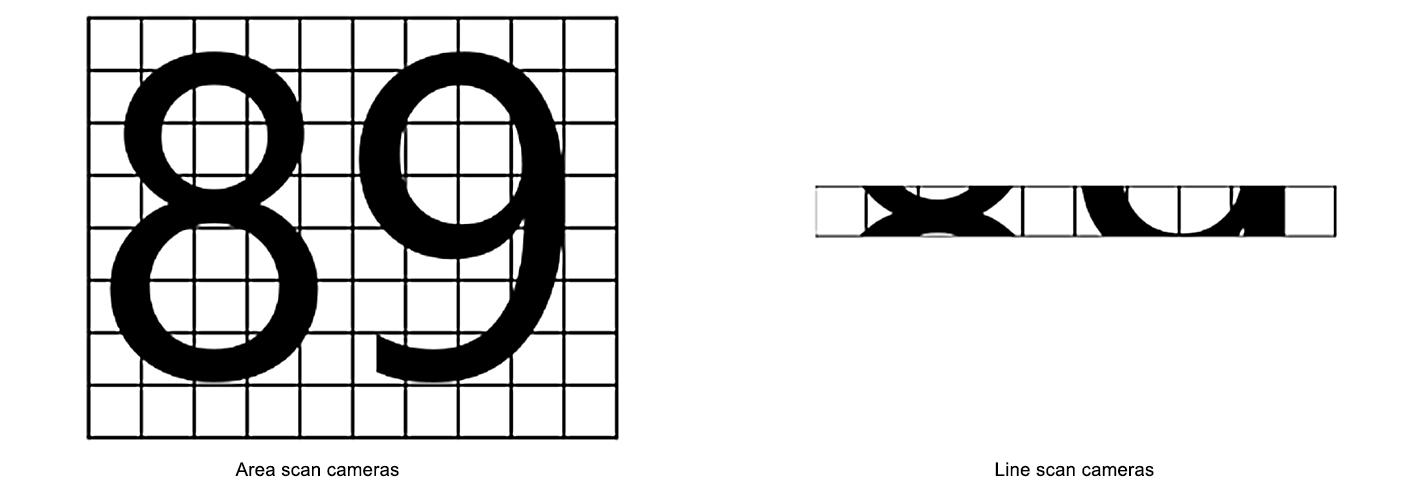
Kamery s plošným snímáním: Snímač je dvourozměrnou rovinou (podobnou matici). Jedním exponováním lze přímo zachytit kompletní dvourozměrný obraz. Každodenní zařízení, jako jsou mobily nebo zrcadlovky, patří mezi plošné kamery.
Kamery s řádkovým snímáním: Snímač je řádkový (jednorozměrné pole). Je třeba ho synchronizovat s pohybem objektu nebo kamery (např. pohyb pásového dopravníku, skenování kamerou), aby bylo možné zachycovat obraz řádek po řádku a následně jej spojit do dvourozměrného obrazu. Je to podobné, jako když metete podlahu koštětem – celou plochu pokryjete pohybem.
2. Rozdíly v aplikačních scénářích
Kamery s plošným snímáním: Uplatnění pro snímání statických objektů nebo objektů s pomalým pohybem, například pro snímání občanských průkazů, kontrolu statických produktů, běžné fotografie apod. Výhodou je jednoduchá obsluha a rychlé získání kompletního obrazu.
Kamery s řádkovým snímáním: Uplatnění při focení rozsáhlých objektů v pohybu, například při kontinuální kontrole tkanin a papíru, skenování vozovky, kontrole kvality tiskovin apod. Výhodou je vyšší rozlišení snímku a detailnost při snímání dlouhých pásů nebo v případě nepřetržitého pohybu.
3. D iference v principu činnosti
Základní rozdíl v principu činnosti kamer s plošným snímáním a kamerami s řádkovým snímáním spočívá v konstrukci senzoru a způsobu snímání, a to následovně:
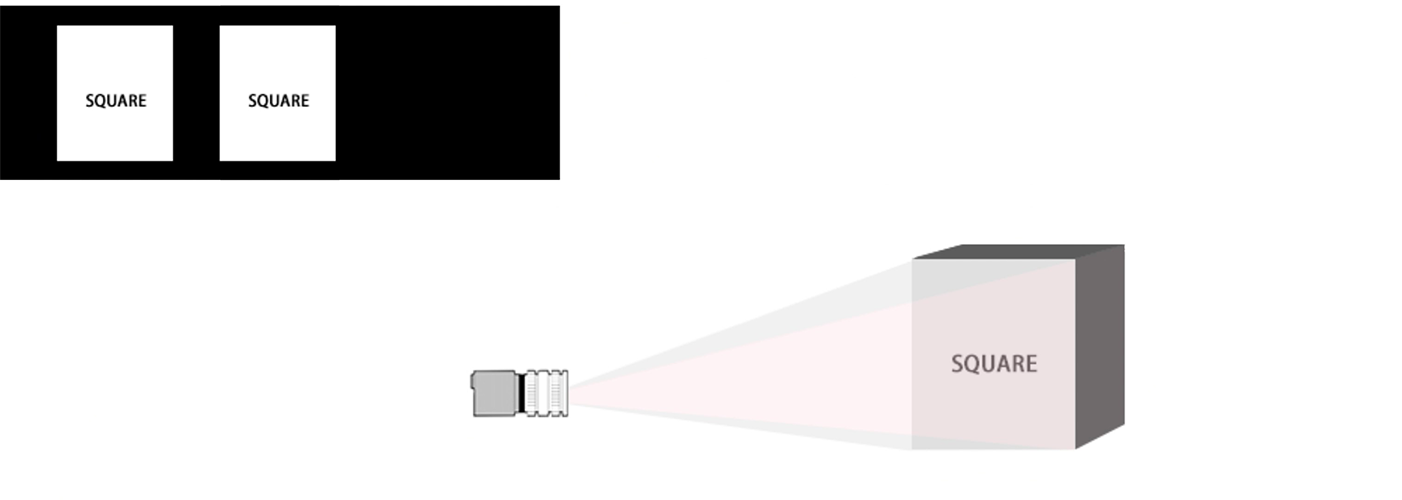
(1).Princip činnosti kamer s plošným snímáním
Stavba senzoru: Jádrem je dvourozměrný plošný senzorový čip (např. CCD nebo CMOS), který je složen z velkého množství pixelů vytvářejících rovinnou matici (podobně jako mřížka).
Proces snímání: Když je clona otevřená, světlo osvětluje současně celý plošný senzor skrze objektiv. Každý pixel senzoru přijímá světlo synchronně a převádí ho na elektrické signály. Po zpracování je přímo generován kompletní dvourozměrný obraz (včetně informací o šířce a výšce).
Vlastnosti: Zachycení celého obrazu lze dokončit jedinou expozicí, bez závislosti na vnějším pohybu, a je vhodné pro zaznamenávání statických nebo pomalu se pohybujících objektů.
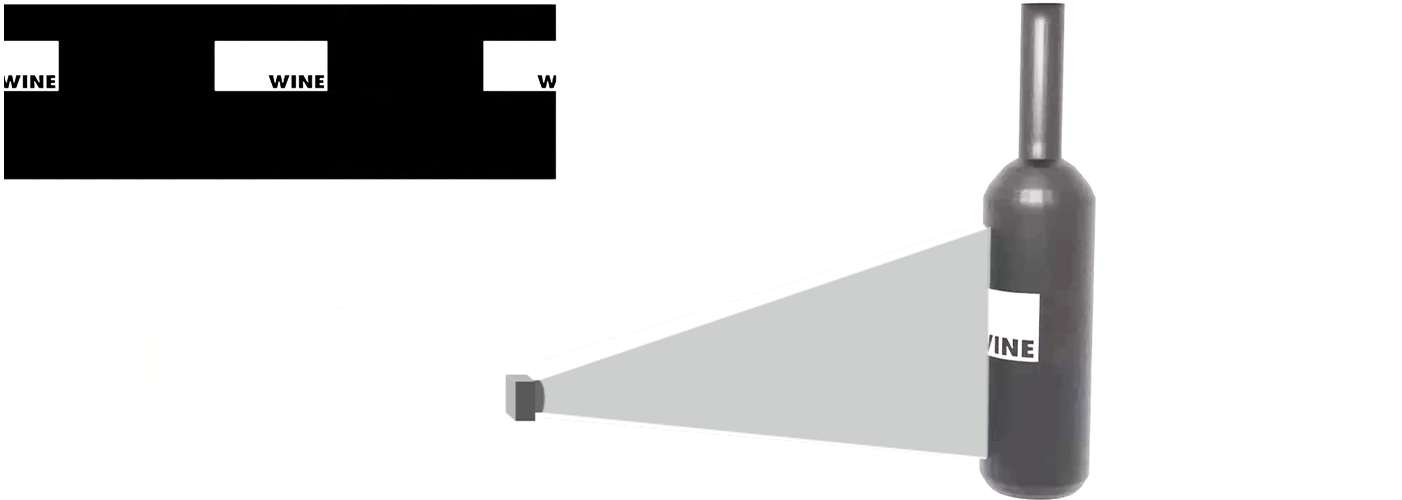
(2).Princip činnosti lineárních kamer
Stavba senzoru: Jádrem je jednorozměrný lineární senzor s pixely uspořádanými v přímce (obsahuje pouze jeden řádek pixelů).
Proces snímání: Liniové senzory mohou najednou snímat pouze informace o jediné linii (tedy pouze šířku). Aby bylo možné získat úplný obraz, je nutné, aby se objekt pohyboval rovnoměrně (například pomocí pásu) nebo aby se pohybovala samotná kamera. Tímto způsobem senzor postupně snímá liniové obrazy na různých pozicích a tyto spojité liniové obrazy následně softwarově slepí dohromady, aby vytvořily kompletní dvourozměrný obraz (šířka + délka vzniklá pohybem).
Vlastnosti: Závisí na spolupráci s vnějším pohybem, vhodné pro zobrazování spojitých, rychlých nebo rozsáhlých objektů a umožňuje zachovat vysoké rozlišení během pohybu.
4. Další klíčové rozdíly
Rozlišení a rychlost snímku: Liniové kamery obvykle mají v jednom směru více pixelů a umožňují tak získat vysoké rozlišení i při rychlém pohybu; plošné kamery mají pružnější snímací frekvence (počet snímků za sekundu), což je činí vhodnými pro zachycení okamžitých obrazů.
Náklady a složitost: Liniové kamery musí být vybaveny pohybovými ovládacími zařízeními, takže systém je složitější a náklady jsou vyšší; systémy plošných kamer jsou jednoduché a náklady jsou relativně nízké.





