

Čtyři běžné typy 3D vidění
Když se technologie 3D vidění stále dále vyvíjí, objevují se různé řešení pro různé průmyslové a komerční potřeby. Tento článek HIFLY zkoumá čtyři běžné technologie 3D obrazového zachycování, analyzuje jejich pracovní principy, výhody, omezení a typické aplikace.
1. Kamera s dvojitým viděním
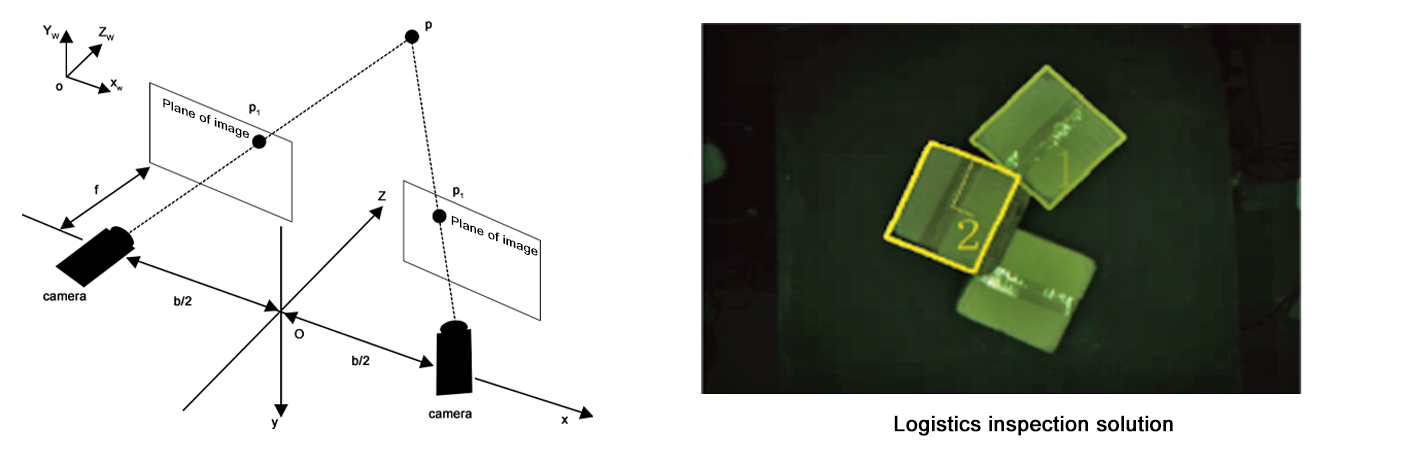
Funguje podobně jako lidské dvojité vidění, stereoskopické systémy používají dvě kamery umístěné pod úhlem, které zachycují obrázky z mírně odlišných perspektiv. Pomocí výpočtu posunu pixelů (disparitety) mezi dvěma obrázky může systém odhadnout informace o hloubce a rekonstruovat 3D modely.
Výhody:
Nízkonákladová konfigurace hardware
Jednoduchá architektura systému
Snadná implementace a provoz
Omezení:
Omezená přesnost (obvykle na úrovni milimetru)
Nedostatečné pro vysokopřesnostní průmyslové aplikace
Použití: Základní rozpoznávání objektů, navigace autonomních vozidel a konzumní detekce hloubky.
2. Laserový čárový profilér
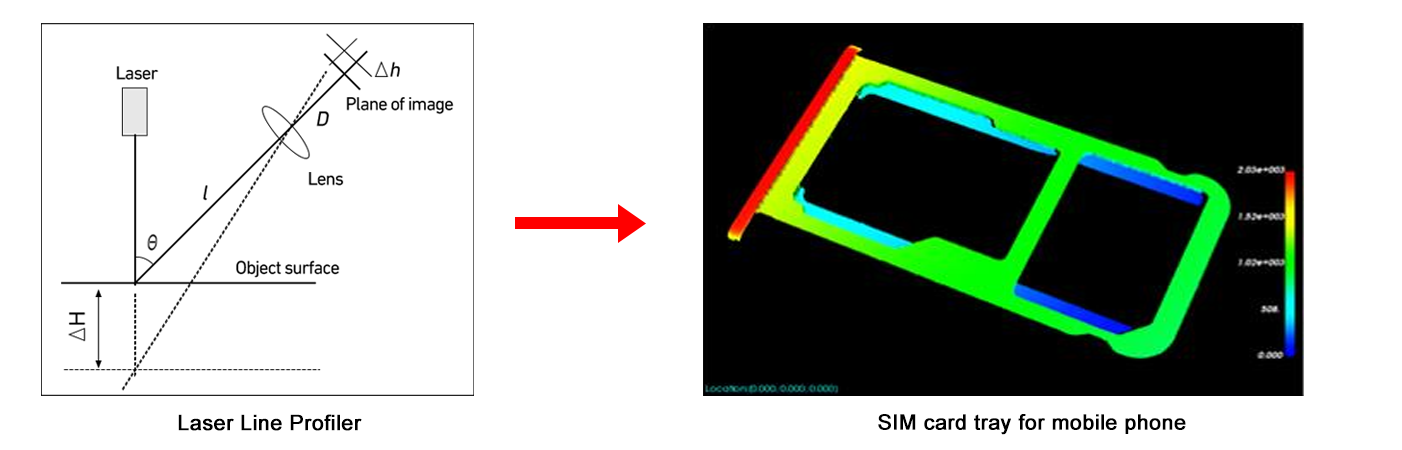
Tento systém kombinuje projektor laserové čáry s kamerou umístěnou v pevném úhlu. Zatímco laserová čára skenuje přes pohyblivý objekt, kamera zachycuje deformace ve vyprojektované čáře a generuje 3D bodové mraky.
Výhody:
Vynikající přesnost v ose Z (na submikronové úrovni)
Přesnost v osách XY v rozsahu desítek mikrometrů
Ideální pro měření rovinnosti/vysokopřesné výšky
Omezení:
Vyžaduje souřaděný mechanický pohyb
Výkon se zhoršuje na odrazivých povrchůch
Průmyslová dominace: Momentálně nejrozšířenější řešení 3D vidění výroby pro kvalitní inspekci a rozměrovou kontrolu.
3. Strukturovaná světelná 3D kamera
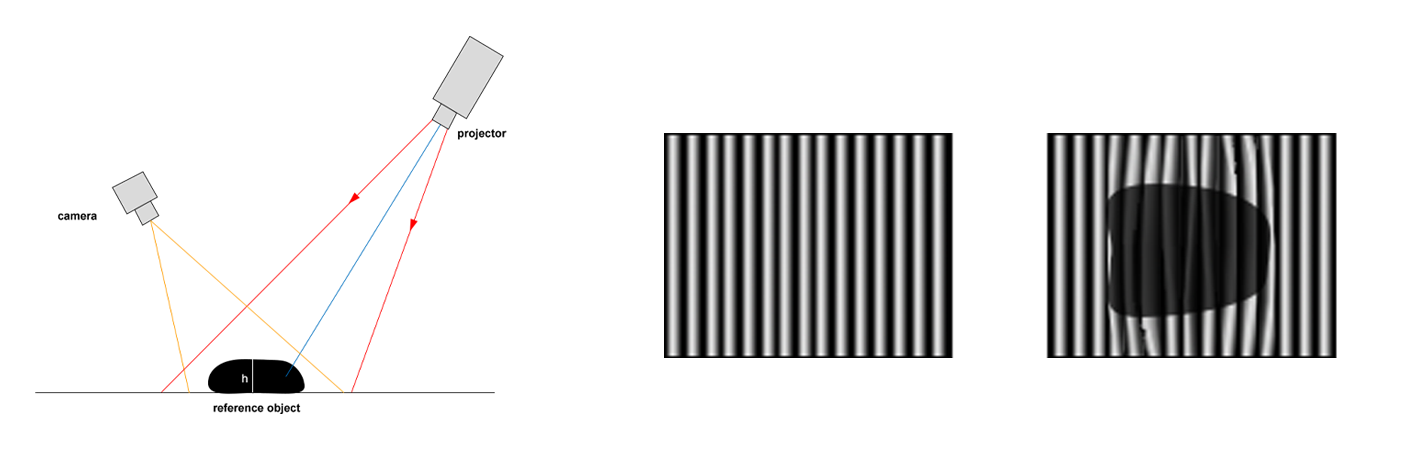
Tato technologie projekční zakódované světelné vzory (mřížky či skvrny) na cíle. Jedna nebo více kamer následně analyzují zkreslené vzory způsobené povrchy objektů pro výpočet 3D souřadnic.
Výhody:
Měření bez kontaktu
Schopnost bezčinného skenování
Přesnost na mikroúrovni v malých oblastech zorného pole
Efektivní ve velkém měřítku aplikací
Omezení:
Vyšší náklady na zařízení
Citlivé na rušení okolním světlem
Hlavní aplikace: 3D náhodné chytání
4. Time-of-Flight (ToF) Laserový skener
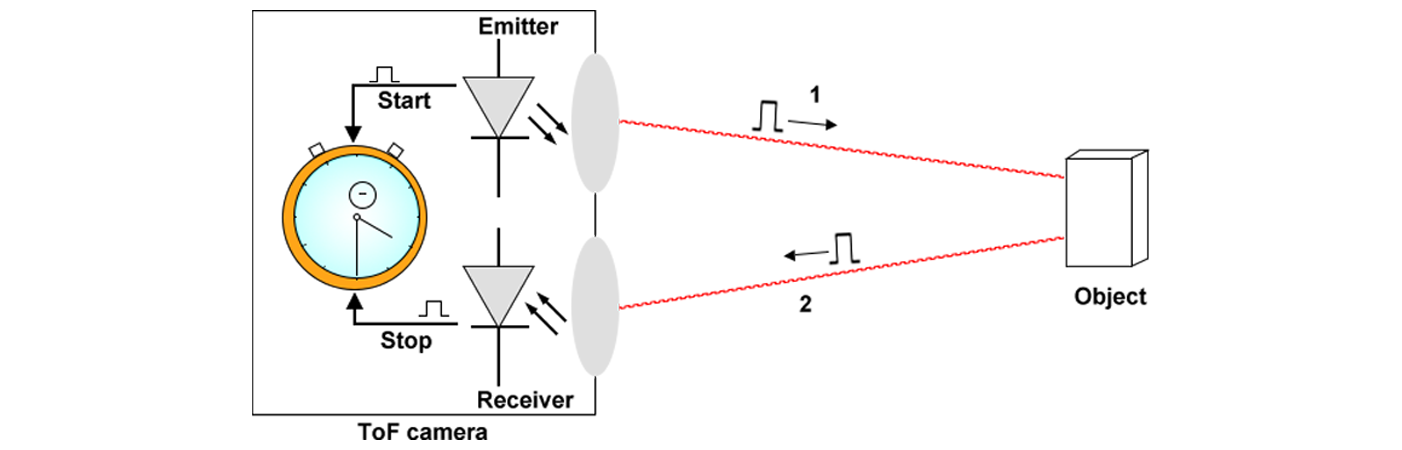
Systémy ToF měří čas oběhu infrčervených laserových pulzů pro výpočet vzdáleností. Toto přímé měření času letu umožňuje 3D mapování v reálném čase.
Výhody:
Vynikající výkon v reálném čase
Získávání hloubky v celém poli
Kompaktní velikost systému
Omezení:
Omezená přesnost měření
Citlivý na vícecestové rušení
Obchodní šíření: Široce používáno v spotřební elektronice (VR/AR), bezpečnostních systémech a lékařském obrazování. Průmyslové aplikace jsou převážně omezeny na vyhýbání se překážkám u AGV a základní navigaci.
Průvodce porovnáním a výběrem technologie
Každá technologie se vyznačuje v určitých scénářích:
Aplikace citlivé na náklady: Stereo vidění
Požadavky na ultra vysokou přesnost: Profilace laserovou čarou
Skenování složitých povrchů: Strukturované světlo
Časově reálné dynamické senzorování: ToF systémy





