

Kolik průmyslových kamer může jedna jednotka podporovat v systému počítání?
V moderních systémech vizuálu je určení, kolik kamer může jediný hostitel (například počítač nebo server) podporovat, klíčovou otázkou pro návrh systému, škálovatelnost a optimalizaci nákladů. Odpověď závisí na více navzájem propojených faktorech, včetně možností hardwaru, efektivnosti softwaru, specifikací průmyslových kamer a požadavcích aplikace. Tento článek zkoumá tyto klíčové proměnné a poskytuje rámec pro odhad kapacity kamer v systému vizuálu.
1. Hardwarové komponenty a jejich vliv
Hardwarová vybavení hostitele je základem podpory kamer, přičemž dvě hlavní aspekty sehrávají velkou roli.
1.1 Procesní jednotky: CPU a GPU
Procesor CPU zpracovává široké spektrum úloh s obrazovým zpracováním, od základního filtrování po složité inferenci strojového učení. Kameru s vysokým rozlišením nebo vysokou frekvencí snímků generují velké objemy dat, které napínají CPU. Vícejádrové CPU, jako Intel i9 nebo AMD Threadripper, mohou distribuovat úkoly mezi jádra pro paralelní zpracování. Na druhé straně revolucionalizují GPU vizuální systémy tím, že urychlují paralelní výpočet, což je zejména důležité pro úkoly jako 3D vidění a hluboké učení v autonomním řízení. Kamery integrované s GPU optimalizovanými kanály, jako je CUDA v GPU NVIDIA, odebírají zpracování od CPU, čímž se potenciálně mohou zdvojnásobit nebo ztrojit podporované kamery.
1.2 Paměť, úložiště a vstup/výstup
Dostatečná paměť RAM je nezbytná pro vyrovnávací paměť video datových proudů a zpracovaných údajů. Kamera s rozlišením 4K při 30 FPS generuje asi 300 MB/s neskomprimovaných dat, což zvyšuje požadavky na paměť v systémech s více kamerami. Pro kamery s vysokým rozlišením je třeba přidělit minimálně 4–8 GB RAM na každou kameru. Vysokorychlostní úložiště, jako jsou NVMe SSD, a spolehlivé rozhraní I/O, jako USB 3.2 a PCIe, jsou klíčové pro ingestování a ukládání dat. Starší rozhraní mohou vážně omezit škálovatelnost systému.
2. Průmyslový Specifikace kamery
Parametry průmyslové kamery přímo ovlivňují zátěž hostitelského systému hlavně prostřednictvím následujících dvou klíčových faktorů.
2.1 Rozlišení a snímková frekvence
Výšší rozlišení a frekvence snímků znamenají více dat k zpracování. Kamera s rozlišením 4K vyprodukuje čtyřnásobně více pixelů než kamera s rozlišením 1080p, což významně zvyšuje nároky na zpracování. Stejně tak kamera s frekvencí 120 FPS generuje čtyřnásobně více dat než kamera s frekvencí 30 FPS. V sportovním vysílání se používají kamery s vysokým rozlišením a vysokou frekvencí snímků, ale kladou extrémně vysoké zátěže na hostitele, přičemž je třeba mít výkonné hardwarové prostředky, aby nedošlo ke ztrátě kvality.
2.2 Komprese a rozhraní
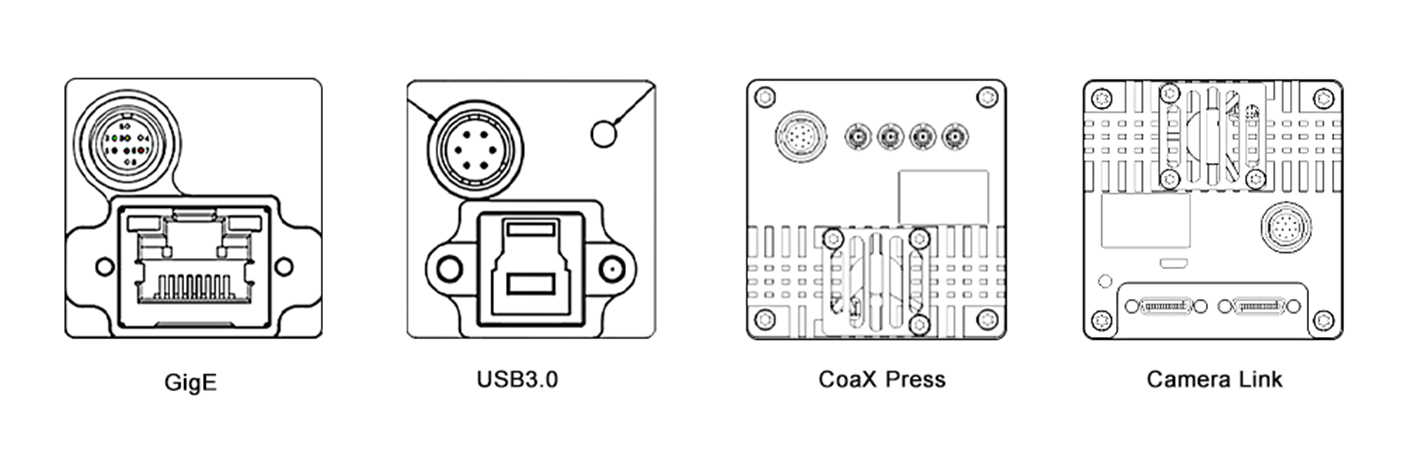
Volba formátu komprese ovlivňuje velikost dat a náklady na zpracování. Komprimované formáty jako H.264 snižují šířku pásma, ale vyžadují dekódování na hostiteli. Nekomprimované formáty nabízejí vyšší věrnost, ale spotřebovávají více prostředků. Navíc je typ rozhraní kamery klíčový. Vysokorychlostní rozhraní jako GigE Vision a CoaXPress umožňují efektivní přenos dat pro vícekamerové nastavení, zatímco starší rozhraní jako USB 2.0 omezuje škálovatelnost kvůli omezené šířce pásma.
3. Softwarová a zpracovací linka
Efektivita softwaru je stejně důležitá, s těmito dvěma oblastmi jako klíčovými pro výkon systému.
3.1 Operační systém a softwarové nástroje
Operační systém a jeho ovladače tvoří softwarovou základnu. Operační systémy v reálném čase (RTOS) minimalizují prodlevy, což je ideální pro aplikace jako je robotická kontrola. Systémy založené na Linuxu jsou populární díky podpoře open-source. Optimalizované ovladače zvyšují výkon hardwaru. Softwarové knihovny pro vizualizaci, jako je OpenCV, MATLAB a hloubkové učení rámce jako TensorFlow a PyTorch, se liší v početní efektivitě. Například hostitel běžící na GPU akcelerovaném modelu YOLO může podporovat méně kamer než ten používající základní detekci hran kvůli vyšší komplexitě.

3.2 Víceproužkovost a optimalizace
Efektivní víceprouvod a paralelizace jsou klíčové pro maximalizaci výkonu systému. Víceprouvod umožňuje spouštět úkoly současně na jádrech CPU, zatímco paralelizace využívá GPU pro zpracování dat. Technologie jako OpenMP a CUDA poskytují rámce pro implementaci. V systému vícekamerového dohledu může OpenMP distribuovat zpracování signálů z kamer mezi jádra CPU a CUDA může urychlit analýzu obrazu na GPU, čímž je možné obsluhovat více kamer.
4. Požadavky aplikace
Složitost úkolu vizualizace určuje alokaci zdrojů, přičemž hlavními faktory jsou reálný čas a složitost zpracování.
4.1 Zpracování v reálném čase vs. offline zpracování
Aplikace v reálném čase, jako je autonomní jízda a průmyslová automatizace, vyžadují okamžité zpracování s nízkou latencí, což omezuje počet kamer, které hostitel může podporovat. Offline zpracování, jako je dávková analýza videa, může obsluhovat více kamer, ale má prodlené výsledky.
4.2 Složitost zpracování
Jednoduché úkoly, jako je detekce pohybu, kladou malé výpočetní břemeno, což umožňuje hostiteli podporovat více kamer. Složité úkoly, jako je 3D rekonstrukce nebo pokročilá rozpoznávání obličejů, vyžadují významné zdroje, čímž se snižuje počet podporovaných kamer. Například hostitel může podporovat 10 kamer pro detekci pohybu, ale pouze 3 pro reálně časovou odhad hloubky v 3D.
5. Odhady rámce
Použijte následující kroky pro odhad kapacity kamery:
Definice parametrů kamery: Rozlišení, frekvence snímků, komprese a rozhraní.
Vypočtěte propustnost dat: Nekomprimovaná datová sazba = Rozlišení × Frekvence snímků × Bitová hloubka / 8 (např., 1080p při 30 FPS = 1920×1080×30×24 / 8 = ~1,4 GB/s).
Posuďte limity hardwaru: Ujistěte se, že výpočetní výkon CPU/GPU ≥ celková propustnost dat × faktor zpracovacího nákladu (2–5× pro složité úkoly).
Testování s prototypy: Použijte nástroje pro srovnávací testy (např. Intel VTune, NVIDIA Nsight) k měření využití prostředků pro jednu kameru a pak škáluji lineárně (s úpravami kvůli ziskům/ztrátám paralelizace).
Závěr
Počet kamer, které může hostitel podporovat v systému počítačového vidění, není pevné číslo, ale rovnováha mezi schopnostmi hardwaru, specifikacemi kamer, optimalizací softwaru a složitostí úkolů. Pro většinu systémů je nejspolehlivějším přístupem začít s prototypem a postupně škálovat nahoru, zatímco sledujete využití prostředků. S rychlým rozvojem hardwaru (např. rychlejší GPU, AI akcelerátory) a softwaru (např. frameworky pro edge computing) bude kapacita na podporu více kamer s vyšší výkoností dále narůstat. Tento vývoj umožní vytvářet sofistikovanější a škálovatelnější řešení počítačového vidění, což otevírá nové možnosti v různých odvětvích, od zdravotnictví a dopravy po bezpečnost a zábavu.
Tento článek poskytuje základní pochopení pro systémové architekty a inženýry, zdůrazňuje potřebu zaměřeného testování a optimalizace s cílem splnit konkrétní požadavky aplikací. Pokud budeme pečlivě zvažovat všechny příslušné faktory, je možné navrhnout vizuální systémy, které jsou jak efektivní, tak schopné vyhovět stále rostoucím požadavkům moderních aplikací.





