

Detekce kontur pomocí strojového vidění
Ve věku průmyslu 4.0 a inteligentní automatizace se strojové vidění stalo klíčovou technologií, která umožňuje strojům „vidět“ a přesně interpretovat obrazová data, často s přesností převyšující lidské schopnosti. Jednou z jejích klíčových funkcí je detekce obrysu je kritická: extrahuje tvary hranic objektů z digitálních obrázků a tvoří tak základ pro úkony, jako je rozpoznávání objektů, měření rozměrů, kontrola vad a manipulace roboty.
1. Co je detekce obrysu?
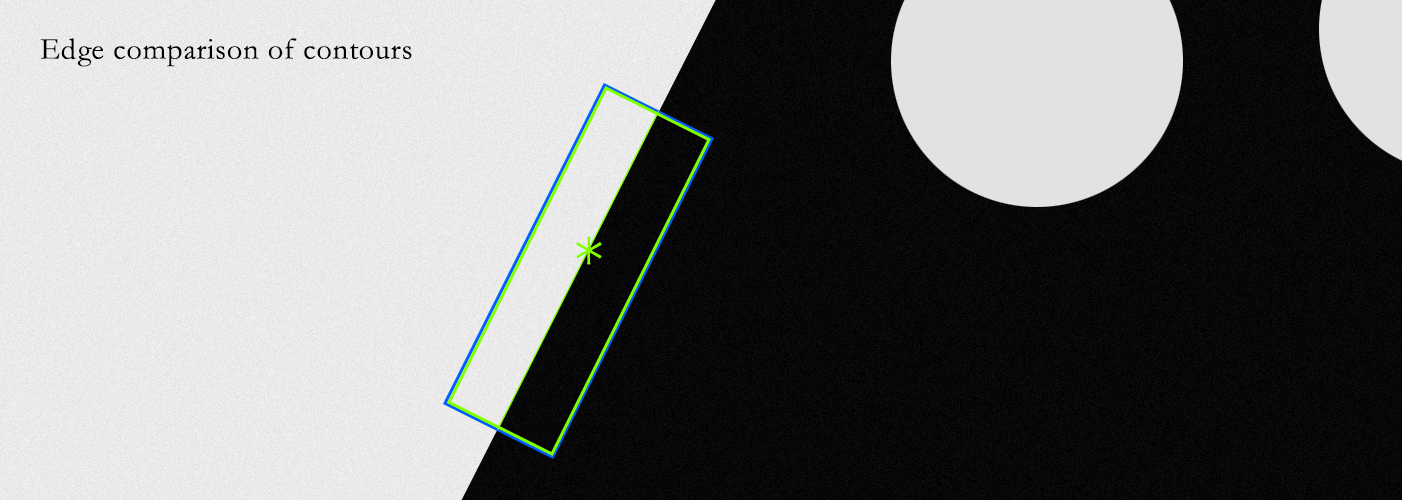
„Obrys“ (contour) v obrazovém zpracování je křivka, která spojuje souvislé body (po hranici objektu) se stejnou intenzitou nebo barvou a odděluje objekt od jeho pozadí. Na rozdíl od diskrétních hran (přechody mezi světlým a tmavým na úrovni pixelů) jsou obrysy spojité smyčky (nebo otevřené křivky u částečných objektů), které reprezentují objektův tvar tvar , nikoli pouze izolované změny intenzity.
Hlavním cílem detekce obrysů je zjednodušit obrazová data: převod 2D obrázku na 1D čáry obrysů umožňuje strojům efektivně analyzovat geometrii objektu (velikost, úhly, symetrii), aniž by bylo nutné zpracovávat každý pixel – což je zásadní pro aplikace v reálném čase, kde jsou stejně důležité rychlost i přesnost.
2. Základní principy
Detekce obrysů vychází ze dvou klíčových kroků: předzpracování (zvýraznění kontrastu mezi objektem a pozadím) a extrakce obrysů (identifikace bodů hranice). Tyto kroky řeší nedokonalosti vstupních obrázků, jako je šum, nerovnoměrné osvětlení nebo nízký kontrast, které mohou hranice zahalovat.
2.1 Předzpracování
Surové obrázky zřídka mají jasné hranice, proto je předzpracování nezbytné:
Převod do odstínů šedi : Většina algoritmů používá jednokanálové obrázky v odstínech šedi (zjednodušení dat ze tří RGB kanálů na jeden, protože barva je často irelevantní).
Snížení hluku : Gaussovo vyhlazení zjemňuje obrázky pomocí Gaussova jádra, potlačuje vysokofrekvenční šum a zároveň uchovává hlavní změny jasu – klíčové pro zabránění falešným hranám způsobeným rušením senzorů nebo kolísáním osvětlení.
Detekci hran : Detekce změn jasu na úrovni jednotlivých pixelů (hran), které tvoří obrysy. Cannyho detektor hran (víceetapová metoda: vyhlazení, výpočet gradientu, potlačení ne maximálních hodnot, prahování s histerezí) je zlatým standardem, který vytváří tenké a souvislé hrany. Sobelův operátor, který zvýrazňuje horizontální/vertikální hrany, je vhodný pro silnější obrysy.
Prahování : Převádí hranové mapy v odstínech šedi na binární (černobílé) obrázky, kde popředí (okraje objektů) je 1 a pozadí 0 – zjednodušuje sledování obrysů.
2.2 Extrakce obrysů
Po předběžném zpracování algoritmy sledují spojené popředí pixely k vytvoření obrysů. Freemanův řetězový kód Freeman Chain Code je široce používaný: reprezentuje obrysy jako směrové kódy (nahoru, dolů, vlevo, vpravo) vzhledem k předchozímu pixelu, čímž se snižuje nároky na ukládání a usnadňuje porovnání tvarů. Knihovny jako OpenCV toto zjednodušují funkcemi jako findContours(), která vrací souřadnice obrysových pixelů a umožňuje filtrování (dle plochy nebo poměru stran) k odstranění šumu.

3. Pokročilé techniky
Tradiční metody fungují pro kontrolované prostředí s vysokým kontrastem, ale reálné situace (nerovnoměrné osvětlení, překrývající se objekty) vyžadují pokročilé přístupy:
Adaptivní prahování : Vypočítá lokální prahy pro každý pixel (na rozdíl od jediného globálního prahu), ideální pro obrázky s proměnlivým osvětlením (např. průmyslové součástky pod továrními světly).
Detekce založená na hloubkovém učení : Konvoluční neuronové sítě (CNN) extrahují hranice přímo z hrubých obrázků, aniž by bylo třeba ručního předběžného zpracování. Modely jako HED (Holisticky vnořený detektor hran) a RCF (Bohatší konvoluční funkce) sloučení vícescale CNN funkcí pro podrobné mapy hran, vynikající ve složitých scénách (lékařské obrázky, přeplněné prostředí).
4. Klíčové výzvy
Navzdory pokroku zůstávají reálné překážky:
Šum a osvětlení : Dílenské podlahy, šero nebo venkovní prostředí způsobují přerušované/nepravé obrysy.
Překrývající se/zakryté objekty : Překrývající se díly sloučí obrysy, což ztěžuje rozlišení jednotlivých tvarů.
Průhledné/odrazivé materiály : Sklo nebo kov rozptyluje světlo, čímž vznikají slabé/zkreslené okraje.
Výkonnost v reálném čase : Průmyslové úkoly (kontrola na montážních linkách) vyžadují 30 a více snímků za sekundu (FPS). Pro splnění nároků na rychlost musí být modely strojového učení optimalizovány (kvantizace, akcelerace GPU).
5. Aplikace ve skutečném světě
Detekce hran podporuje automatizaci v různých odvětvích:
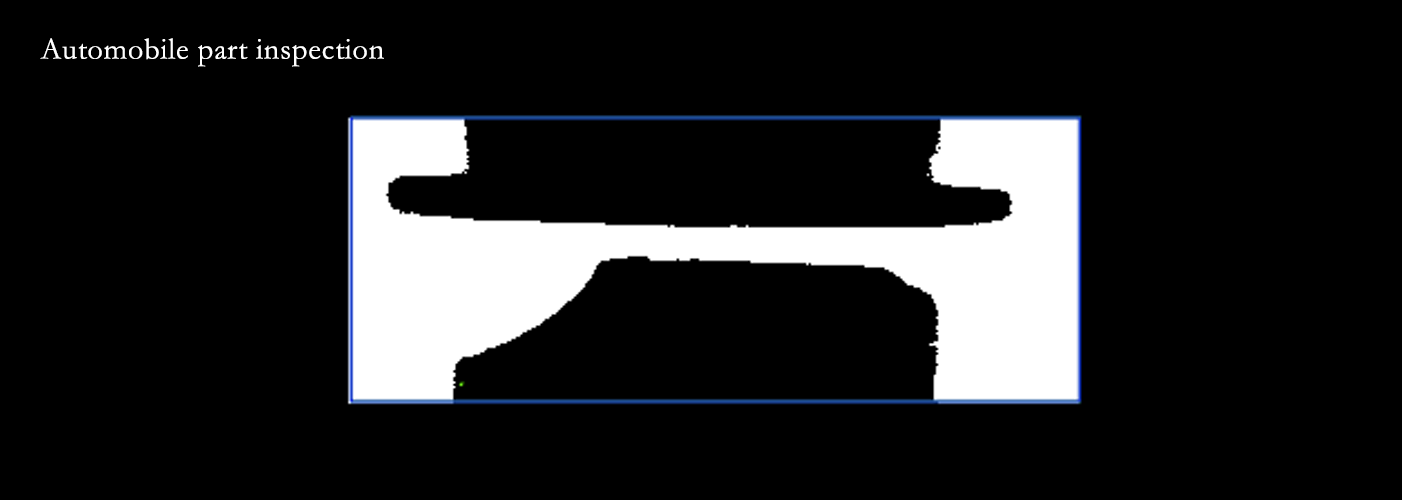
Průmyslová kvalitní kontrola : Zjišťuje vady (praskliny, vydřeniny) v průmyslu. Například v automobilové výrobě se ověřuje, zda motorkové komponenty (ozubená kola, těsnění) odpovídají návrhovým hranám a odmítají se díly mimo tolerance.
Robotické uchopení a umístění : Pomáhá robotům lokalizovat objekty. V skladech využívají robotická ramena kontury pro vyhledání balíčků na pásových dopravnících, výpočet středu/natočení a úpravu sevření.
Lékařském zobrazování : Odděluje anatomické struktury (nádory v CT snímcích, hranice buněk v histologických řezech) a podporuje tak diagnostiku. Modely hloubkového učení zvládají proměnlivé biologické tkáně.
Zemědělství : Třídí ovoce (jablka, pomeranče) podle velikosti/zralosti pomocí analýzy hran a detekuje choroby plodin podle změn kontur listů.
Sledování provozu : Sleduje vozidla, měří průtok nebo identifikuje nehody (pomocí neobvyklých kontur nebo stacionárních objektů) pomocí kamerového dohledávacího systému.
6. Budoucí trendy
Tři trendy budou formovat detekci kontur:
Integrace Edge AI : Lehké modely (kvantované CNN) na edge zařízeních (průmyslové kamery, drony) umožňují zpracování v reálném čase bez závislosti na cloudu – kritické pro autonomní roboty.
Fúze multimodálních dat : Kombinace vizuálních dat s LiDAR/termovizním snímáním zlepšuje detekci za obtížných podmínek (např. termovizní snímání zvyšuje viditelnost hranic za nízkého osvětlení; LiDAR přidává 3D hloubku pro překrývající se objekty).
Vysvětlitelná umělá inteligence (XAI) : Techniky XAI objasní, jak hluboké učení detekuje kontury, čímž se zvyšuje důvěra v kritických oblastech (diagnostika v medicíně, inspekce v leteckém průmyslu).
Závěr
Detekce kontur pomocí technologie průmyslového vidění propojuje nezpracovaná obrazová data s využitelnými poznatky a podporuje automatizaci a kontrolu kvality. Od tradiční detekce hran až po hloubkové učení se tato technologie vyvíjela, aby zvládla složité výzvy. S postupem technologie zůstane v jádru chytrých systémů a umožní strojům být v různých odvětvích efektivnější a spolehlivější.





