

Integrationstipps für Board-Level-Kameras für Ingenieure
Auswahl der richtigen Schnittstelle für die Kameraintegration auf Boardebene
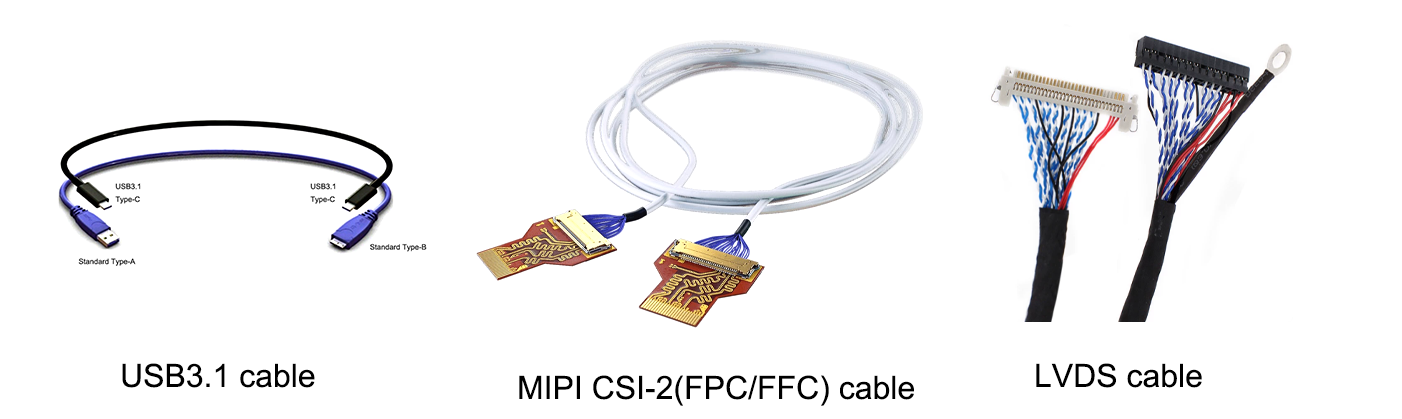
USB 3.1, MIPI CSI-2 und LVDS: Abwägungen hinsichtlich Bandbreite, Latenz und Echtzeit-Synchronisation
Entwicklungsingenieure stehen bei der Auswahl von Schnittstellen für die Kameraintegration auf Leiterplattenebene vor entscheidenden Kompromissen. USB 3.1 bietet hohe Bandbreite (5 Gbps) und eignet sich daher für HD-Videostreaming – allerdings führt die Protokoll-Overhead zu einer Latenz von 5–10 ms, wodurch seine Eignung für Echtzeit-Regelkreise eingeschränkt ist. MIPI CSI-2 bietet skalierbare Bandbreite (bis zu 6 Gbps pro Lane) sowie hardwaregesteuerte Synchronisation, was eine Unter-Millisekunden-Latenz und präzise Zeitsteuerung mehrerer Sensoren ermöglicht – ideal für industrielle Automatisierung und Robotik. LVDS liefert deterministische, extrem niedrige Latenz (< 1 ms) über einfache serielle Protokolle, obwohl die Bandbreite pro Kanal mit ca. 655 Mbps begrenzt ist und somit der Einsatz auf niedrigere Auflösungen oder komprimierte Streams beschränkt bleibt. Vision-Systeme, die eine exakte Synchronisation zwischen Kameras erfordern, sollten MIPI CSI-2 priorisieren; sicherheitskritische Anwendungen wie die Wahrnehmung autonomer Fahrzeuge profitieren von der zeitlichen Vorhersagbarkeit von LVDS. USB 3.1 bleibt für kostensensitive, nicht-zeitkritische HD-Überwachungslösungen geeignet, bei denen geringfügige Latenz akzeptabel ist – vorausgesetzt, thermische und verarbeitungsbedingte Einschränkungen wurden validiert.
Best Practices für Signalintegrität und Leiterplattenlayout durch Interface
Die Signalintegrität ist schnittstellenspezifisch und bildet die Grundlage für eine zuverlässige Kameraleistung auf Leiterplattenebene. Bei USB 3.1 ist eine Differenzimpedanz von 90 Ω mit längegleichen Leitungspaaren (±5 Mil), einer abschirmenden Masseführung und einer strikten Trennung von störanfälligen digitalen Leitungen zur Unterdrückung elektromagnetischer Störungen (EMI) einzuhalten. MIPI CSI-2 erfordert pro differentieller Leitung eine Impedanz von 100 Ω, eine Längengleichheit innerhalb von ±10 Mil und das Vermeiden von Durchkontaktierungen (Vias) in der Nähe von Empfängern – insbesondere bei Hochgeschwindigkeitsleitungen mit Betriebsfrequenzen über 1,5 Gbps von entscheidender Bedeutung. LVDS-Anordnungen verlangen kurze Leitungslängen (< 10 Zoll), eine konstante Impedanz von 100 Ω sowie Schutzleitungen zur Unterdrückung von Übersprechen. Bei allen Schnittstellen sind Masseebenen zu partitionieren, um analoge Sensorschaltungen von digitalen ISP- und Prozessordomänen zu isolieren; Entkopplungskondensatoren sind innerhalb von 2 mm von den Versorgungspins anzuordnen, und es sind mindestens vierlagige Leiterplattenaufbauten mit durchgängigen Referenzebenen zu verwenden. Fehlgeleitete Signalleitungen sind für 32 % der Bildartefakte in prototypischen Visionssystemen verantwortlich – weshalb eine Simulation nach dem Layout und die Validierung der Impedanz für sicherheitskritische Designs zwingend erforderlich sind.
Mechanische Integration: Objektivmontage und optische Flexibilität
Eine präzise Montage der Objektive ist unerlässlich: Fehlausrichtungen im Mikrometerbereich führen zu Fokusverschiebungen, Verzerrungen oder Auflösungsverlusten. Ingenieure müssen mechanische Steifigkeit – entscheidend für die Beständigkeit gegenüber Stößen und Vibrationen – mit einer Anpassbarkeit vor Ort in Einklang bringen, die üblicherweise mittels Gewindebarreln oder Shims basierender Halterungen erreicht wird. Für optische Flexibilität ist eine Kompatibilität mit verschiedenen Objektivtypen (festfokussiert, varifokal, flüssig) erforderlich sowie die Unterstützung einer Brennweitenanpassung durch helikale Mechanismen oder motorisierte Steuerungen. Temperaturbedingte Ausdehnungsmismatchs zwischen Objektiven und Sensoren erfordern geeignete Gegenmaßnahmen – beispielsweise den Einsatz von Werkstoffen mit geringem Ausdehnungskoeffizienten (z. B. Invar, keramische Verbundwerkstoffe) oder kinematische Halterungen – insbesondere in industriellen Umgebungen (-40 °C bis +85 °C). Bei Infrarot- oder multispektraler Bildgebung wird die Transparenz des Substratmaterials im Zielwellenlängenbereich (z. B. Germanium für LWIR, Quarzglas für UV) zur primären Konstruktionsanforderung. Modulare Objektivanschlüsse ermöglichen einen schnellen Austausch ohne vollständige Neukalibrierung; die Flanschtiefentoleranzen müssen jedoch unter 10 µm bleiben, um Vignettierung oder eine Verschlechterung der Modulationsübertragungsfunktion (MTF) zu vermeiden.

Sicherstellung einer robusten Systemebenen-Koexistenz bei Kameradesigns auf Leiterplattenebene
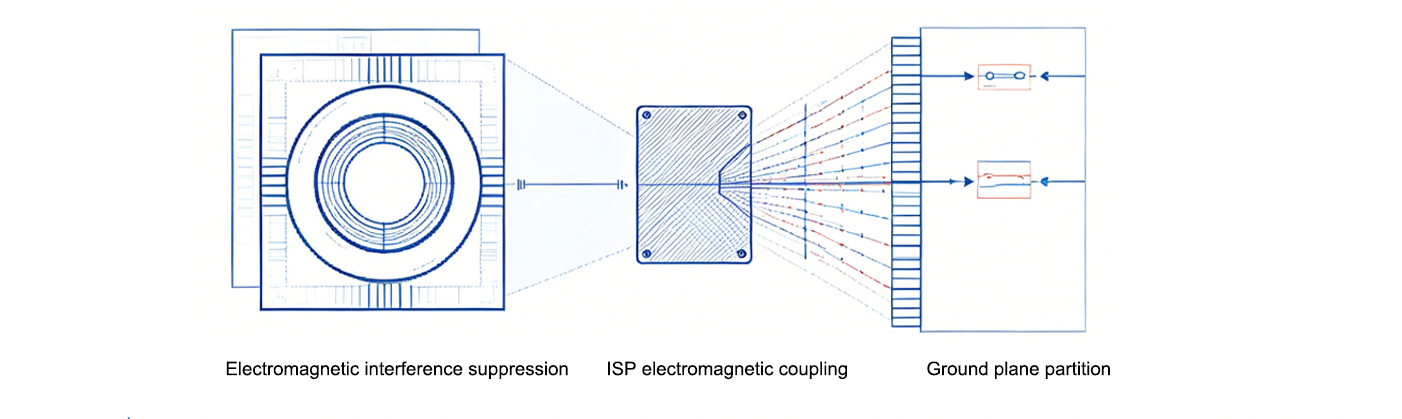
EMI-Minderung und Aufteilung der Masseebene für die Koexistenz von Sensor und ISP
Gehäuselose Kameradesigns auf Leiterplattenebene verfügen nicht über die EMI-Abschirmung geschlossener Module, wodurch eine stärkere Verantwortung für die Isolierung auf Leiterplattenebene zwischen Bildsensoren und ISPs (Image Signal Processors) entsteht. Getrennte Masseflächen – zur Separation analoger Sensordomänen von digitalen ISP-Subsystemen – sind unerlässlich, um die Kopplung leitungsgebundener Störungen zu minimieren, da Mischsignalstörungen Taktoberschwingungen von mehr als 50 dBμV/m erzeugen können (IEC 61000-4-3). Effektive Maßnahmen umfassen die Sternpunkt-Massenverbindung am Stromzuführungspunkt, Schutzleiter mit Durchkontaktierungen (Stitching Vias) rund um Hochgeschwindigkeits-Digitalleitungen, das Vermeiden von thermischen Entlastungen (Thermal Reliefs) in Masseflächen in der Nähe der Sensoren sowie das Einbauen von Ferritperlen in die I²C-Taktleitungen. Die Signalintegrität verschlechtert sich rasch, wenn der Abstand zwischen Sensor und ISP unter 3λ der höchsten Betriebsfrequenz fällt – was eine impedanzgesteuerte Leitungsführung und abgestimmte Längen bei differentiellen Leitungspaaren erforderlich macht. Frühzeitige Prototypenerstellung mit Nahfeld-EMI-Sonden (Abstand 5 mm) identifiziert Störstellen; lokal angebrachte Mu-Metall-Abschirmung über den Sensoren reduziert die abgestrahlten Emissionen um 12–18 dB (FCC OET-65). Eine Mindestabstandsregel von ≥40 Mil zwischen Mischsignal-Domänen verbessert die SNR (Signal-Rausch-Verhältnis) in hochauflösenden Modulen konsistent um 20 %.
Software-Integration und SDK-Portabilität für Kameras auf Board-Ebene
Treiberunterstützung für mehrere Plattformen: Linux RT, QNX und Bare-Metal-RTOS mit Spinnaker
Die plattformübergreifende Software-Portabilität ist unverzichtbar für Embedded-Vision-Einsätze, die Linux Real-Time (RT), QNX und ressourcenbeschränkte bare-metal-RTOS-Umgebungen umfassen. Jedes Betriebssystem stellt unterschiedliche Anforderungen an Timing, Speicher und Treibermodell – dennoch müssen eine konsistente, pixelgenaue Bildaufnahme und eine hardwareausgelöste Synchronisation gewährleistet bleiben. Eine einheitliche SDK-Abstraktionsschicht schließt diese Lücke: Das Spinnaker SDK bietet beispielsweise standardisierte APIs für x86-, ARM- und RISC-V-Plattformen und unterstützt nativ Echtzeit-Bildaufnahme, hardwareausgelöste Auslösung sowie den Zugriff auf ISP-Register. Dadurch entfällt redundante Treiberentwicklung beim Wechsel von Linux-RT-Industrie-PCs zu mikrocontrollerbasierten RTOS-Zielsystemen. Teams, die solche Frameworks nutzen, verkürzen die Integrationszeit um bis zu 40 % und bewahren dabei deterministisches Verhalten – selbst unter Bedingungen thermischer Leistungsreduzierung oder Spannungsskalierung.
Bereit, Ihre Integration von Board-Level-Kameras für die OEM-Produktion zu optimieren?
Nahtlos integration von Board-Level-Kameras ist die Grundlage zuverlässiger, leistungsstarker Embedded-Vision-Systeme – kein noch so fortschrittlicher Algorithmus oder keine noch so leistungsfähige Prozessorhardware kann eine ungeeignete Schnittstellenwahl, Signalintegritätsprobleme oder ein nicht optimiertes mechanisches Design ausgleichen. Durch die Anwendung bewährter Integrationsmethoden aus der Praxis und die Zusammenarbeit mit einem Kamerahersteller, der vallidierte Hardware, Unterstützung bei Referenzdesigns sowie plattformübergreifende Softwaretools bereitstellt, verringern Sie die Anzahl erforderlicher Designiterationen, beschleunigen den Markteinführungszeitpunkt und erreichen eine konsistente, kosteneffiziente Leistung in der Serienfertigung für OEM-Kunden.
Für industrielle Board-Level-Kamera-Lösungen, die speziell auf Ihre Embedded-Vision-Anwendung zugeschnitten sind, oder um vollständige Referenzdesign-Pakete, internes technisches Supportangebot sowie maßgeschneiderte OEM-Fertigungsdienstleistungen (wie von HIFLY angeboten) zu nutzen, arbeiten Sie mit einem Anbieter zusammen, der tief in der industriellen Maschinenbildverarbeitung verwurzelt ist. Die 15-jährige Erfahrung von HIFLY umfasst die Entwicklung von Board-Level-Kameras, vollständige OEM-/ODM-Anpassungen sowie die ganzheitliche Integration eingebetteter Vision-Systeme – untermauert durch die ISO-9001:2015-Zertifizierung, Unterstützung bei der Einhaltung globaler regulatorischer Anforderungen und dedizierte Design-in-Ingenieurleistungen. Kontaktieren Sie uns noch heute für ein unverbindliches Beratungsgespräch, maßgeschneiderte Prototypenerstellung oder zur Optimierung Ihres Workflows für die Integration von Board-Level-Kameras.





