

Der Produktauswahlprozess eines Machine-Vision-Projekts
Wissen Sie, welche Schritte in einem umfassenden Auswahlprozess für ein Vision-Projekt involviert sind? Heute werden wir erkunden, wie man Komponenten für ein Maschinenvision-Projekt auswählt.
- Erfassen der Kundenanforderungen
Wenn wir eine Detektionsprobe erhalten, was sollten wir zuerst tun? Natürlich ist es, mit dem Kunden über deren Anforderungen zu kommunizieren, da das Projekt so sehr wie möglich den Kundenbedürfnissen gerecht werden sollte. Durch das Verständnis der spezifischen Detektionsanforderungen können wir die erste Wahl treffen, basierend darauf, ob das Objekt statisch oder dynamisch ist – das heißt, die Auswahl zwischen Global- oder Rolling-Shutter des industriellen Kameras. Immerhin wird für die Fotografie dynamischer Objekte ein Global-Shutter benötigt.
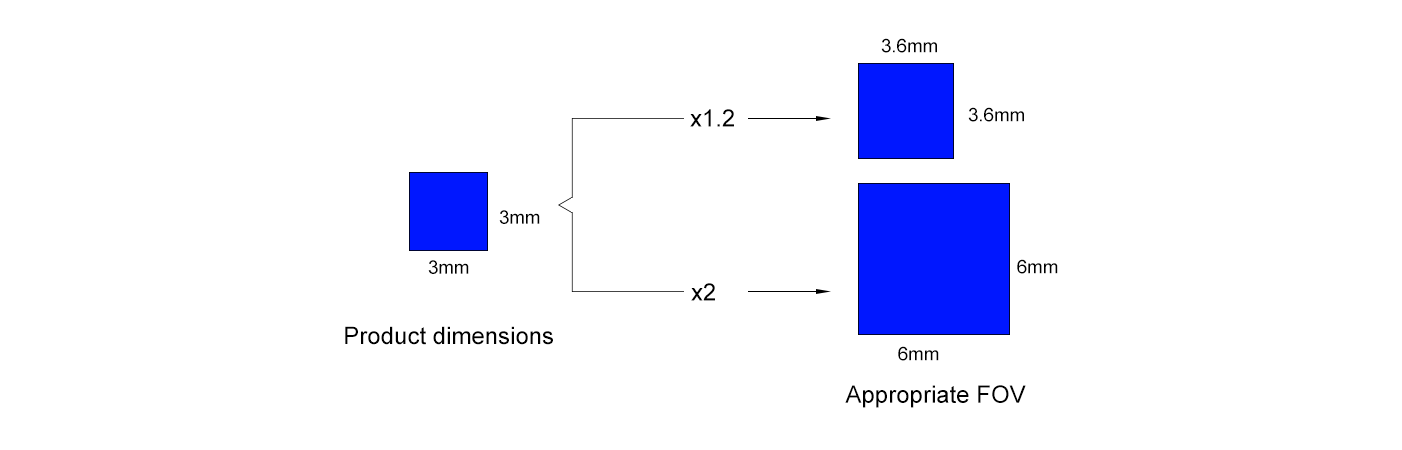
- Festlegen des Feldes O sichtfeld (FOV)
Als Nächstes müssen wir die geeignete FOV-Größe auf Basis der Produktabmessungen bestimmen. Für ein Bild ist die Bildgebende FOV der Kamera im Allgemeinen am besten, wenn sie 1,2 bis 2 Mal so groß wie das Produkt ist.
- Eignung auswählen Industrie Linsen
Es ist allgemein bekannt, dass industrielle Kameralinsen telezentrische Linsen und FA (Factory Automation)-Linsen umfassen und dass sich die FOV-Berechnungsmethoden für verschiedene Linsen unterscheiden. Daher müssen wir konkrete Situationen analysieren. Da jedoch die FOV-Berechnung nicht von der Sensorgöße getrennt werden kann, müssen wir zuerst die Sensormaße berechnen.

Die Sensorgöße wird berechnet, indem man die Auflösung mit der Pixelgröße multipliziert. Nehmen wir als Beispiel eine 1,3-Megapixel-Industrie-Kamera:
•Sensorbreite = 1280 × 4,8 μm = 6,144 mm
• Sensorhöhe = 1024 × 4,8 μm = 4,915 mm
Bei telezentrischen Linsen wird das FOV als Sensorgröße geteilt durch die Linsenvergrößerung berechnet. Mit derselben Kamera und einer 0,5×-telezentrischen Linse:
• Bildgebungsbreite = 6,144 mm ÷ 0,5 = 12,288 mm
• Bildgebungsheight = 4,915 mm ÷ 0,5 = 9,83 mm
Bei industriellen FA-Linsen wird das FOV als Sensorgröße × Arbeitsabstand ÷ Brennweite berechnet. Mit derselben Kamera, einem Arbeitsabstand von 100 mm und einer Brennweite von 8 mm:
• Horizontale Breite = 6,144 mm × 100 ÷ 8 = 76,8 mm
• Horizontale Höhe = 4,915 mm × 100 ÷ 8 = 61,4 mm
All diese Berechnungen dienen der Auswahl geeigneter Kameras und Linsen auf Basis des FOV und der erforderlichen Genauigkeit. Daher ist der nächste Schritt, die Kameragenauigkeit zu berechnen.
- Berechnen Die industrielle Kamerasgenauigkeit
Bei telezentrischen Linsen entspricht die theoretische Präzision der Kamera der Pixelgröße geteilt durch die Vergrößerung der telezentrischen Linse. Fortsetzung des vorherigen Beispiels (0,5× telezentrische Linse):
• Theoretische Präzision = 4,8 μm ÷ 0,5 = 9,6 μm
Bei industriellen FA-Linsen wird die theoretische Präzision als FOV ÷ Auflösung berechnet. Wenn das FOV 72 mm beträgt:
• Theoretische Präzision = 72 mm ÷ 1280 = 0,056 mm
Obiges sind theoretische Präzisionen, und es gibt oft einen erheblichen Unterschied zwischen Theorie und Praxis. Daher muss die tatsächliche Präzision weiter berechnet werden. Zum Beispiel:
Bei Frontbeleuchtung beträgt die tatsächliche Genauigkeit 3 bis 5 Mal die theoretische Genauigkeit.
Bei Rückenbeleuchtung mit Maschinenvision kann die tatsächliche Genauigkeit 1 bis 2 Mal die theoretische Genauigkeit erreichen.

Eine höhere Genauigkeit kann erzielt werden, wenn der Algorithmus subpixelbasiert interpolieren kann.
Wie wir alle wissen, ist Beleuchtung unerlässlich für die visuelle Prüfung – eine gute Beleuchtung kann den Erfolg eines visuellen Projekts zur Hälfte sichern. Daher ist es notwendig, eine Lichtquelle passender Größe für Beleuchtungstests auszuwählen. Zum Beispiel:
Bei Ring-, Flächen- oder Schüsselbeleuchtungen für Maschinenvision ist die Größe der Lichtquelle normalerweise um 10 % bis 20 % größer als das FOV.
Bei Beleuchtungsstäben für maschinelles Sehen ist die Lichtquelle-Länge im Allgemeinen um 20 % bis 30 % länger als das FOV.
Obiges ist der vollständige Auswahlprozess für Komponenten in einem Projekt zur maschinellen Bildverarbeitung. Indem wir diesen Schritten folgen, können wir schnell die für das Projekt benötigten Produkte bestimmen. Alternativ können Sie uns eine Nachricht hinterlassen und wir werden Ihnen bei der Auswahl der passendsten Produkte für Ihre Projektanforderungen helfen.





