

Ανίχνευση Περιγράμματος Όρασης Μηχανής
Στην εποχή της Βιομηχανίας 4.0 και της έξυπνης αυτοματοποίησης, η μηχανική όραση έχει γίνει βασική τεχνολογία, επιτρέποντας στις μηχανές να «βλέπουν» και να ερμηνεύουν οπτικά δεδομένα με ακρίβεια που συχνά υπερβαίνει τις ανθρώπινες δυνατότητες. Μεταξύ των βασικών λειτουργιών της, ανίχνευση του περίγραμμα έχει κρίσιμη σημασία: αναλύει τα σχήματα των ορίων των αντικειμένων από ψηφιακές εικόνες, δημιουργώντας τη βάση για εργασίες όπως η αναγνώριση αντικειμένων, η μέτρηση διαστάσεων, η επιθεώρηση ελαττωμάτων και η ρομποτική διαχείριση.
1. Τι είναι η Ανίχνευση Περιγράμματος;
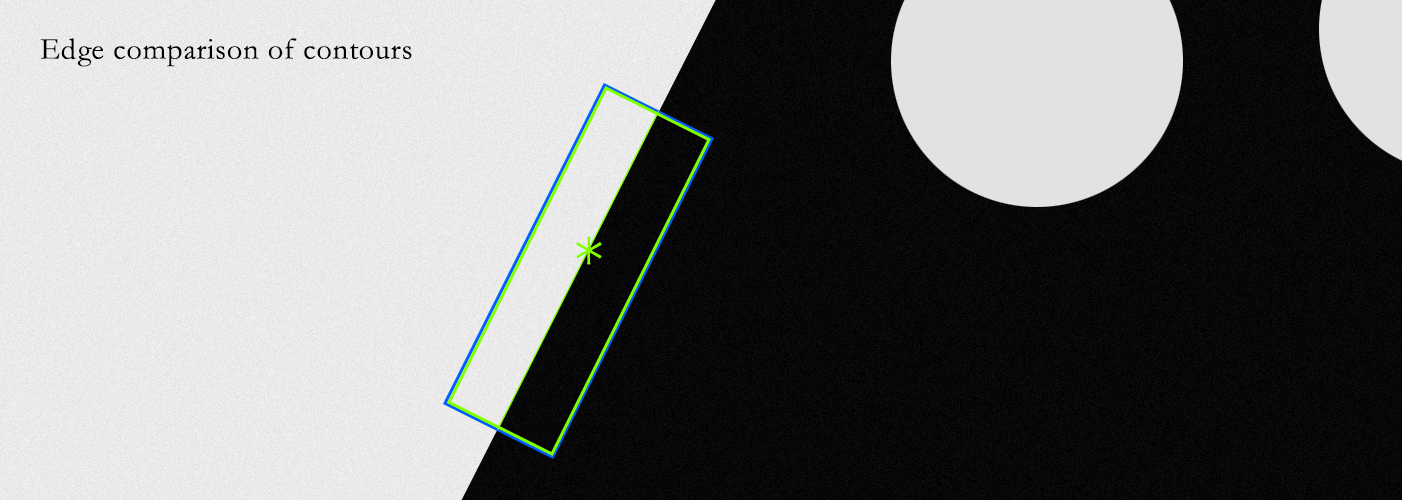
Ένας «περίγραμμα» στην επεξεργασία εικόνας είναι μια καμπύλη που συνδέει συνεχείς σημεία (κατά μήκος των ορίων ενός αντικειμένου) με την ίδια ένταση ή χρώμα, διαχωρίζοντας το αντικείμενο από το φόντο του. Σε αντίθεση με τις διακριτές ακμές (μεταβάσεις φως-σκοτάδι σε επίπεδο pixel), τα περιγράμματα είναι συνεχείς βρόχοι (ή ανοιχτές καμπύλες για μερικά αντικείμενα) που αντιπροσωπεύουν ένα αντικείμενο, σχήμα , και όχι απλώς απομονωμένες αλλαγές έντασης.
Ο κύριος στόχος της ανίχνευσης περιγραμμάτων είναι η απλοποίηση των δεδομένων εικόνας: η μείωση μιας 2D εικόνας σε 1D γραμμές περιγράμματος επιτρέπει στις μηχανές να αναλύουν αποτελεσματικά τη γεωμετρία του αντικειμένου (μέγεθος, γωνίες, συμμετρία), χωρίς να επεξεργάζονται κάθε pixel — κάτι απαραίτητο για εφαρμογές σε πραγματικό χρόνο, όπου η ταχύτητα και η ακρίβεια είναι εξίσου σημαντικές.
2. Βασικές Αρχές
Η ανίχνευση περιγραμμάτων βασίζεται σε δύο βασικά βήματα: προεπεξεργασία (ενίσχυση της αντίθεσης μεταξύ αντικειμένου και φόντου) και εξαγωγή περιγραμμάτων (εντοπισμός σημείων ορίων). Αυτά τα βήματα αντιμετωπίζουν ελαττώματα αρχικής εικόνας, όπως θόρυβος, ανομοιόμορφο φωτισμός ή χαμηλή αντίθεση, που καθιστούν δύσκολη τη διακριβώση των ορίων.
2.1 Προεπεξεργασία
Οι αρχικές εικόνες σπάνια έχουν ξεκάθαρα όρια, γι' αυτό η προ-επεξεργασία είναι απαραίτητη:
Μετατροπή σε ασπρόμαυρο : Οι περισσότεροι αλγόριθμοι χρησιμοποιούν εικόνες σε ασπρόμαυρο (απλοποιώντας τα δεδομένα από τρία RGB κανάλια σε ένα, καθώς το χρώμα συχνά δεν είναι σημαντικό).
Μείωση του θορύβου : Η θολώδης επεξεργασία με Gaussian ομαλοποιεί τις εικόνες χρησιμοποιώντας έναν πυρήνα Gaussian, μειώνοντας τον θόρυβο υψηλής συχνότητας ενώ διατηρεί τις βασικές αλλαγές έντασης – κρίσιμο για την αποφυγή ψευδών ακμών λόγω παρεμβολών αισθητήρα ή διακυμάνσεων φωτισμού.
Ανίχνευση ακμών : Ανιχνεύει αλλαγές στην ένταση των pixel (ακμές) που δημιουργούν τις περιγραμματικές γραμμές. Ο Ανιχνευτής Ακμών Canny (μια πολυσταδιακή μέθοδος: ομαλοποίηση, υπολογισμός κλίσης, μη-μέγιστη πίεση, κατωφέρεια με κατώφλι) είναι το επικρατέστερο πρότυπο, παράγοντας λεπτές, συνεχείς ακμές. Ο Τελεστής Sobel, που επισημαίνει οριζόντιες/κάθετες ακμές, λειτουργεί για πιο παχιές περιγραμματικές γραμμές.
Κατωφέρεια : Μετατρέπει τους χάρτες ακμών σε ασπρόμαυρες (μαύρο/άσπρο) εικόνες, με το προσκήνιο (περιγράμματα αντικειμένων) ως 1 και το φόντο ως 0 – απλοποιώντας την παρακολούθηση περιγραμμάτων.
2.2 Εξαγωγή Περιγραμμάτων
Μετά την προεπεξεργασία, οι αλγόριθμοι εντοπίζουν συνδεδεμένα προγενέστερα pixel για να σχηματίσουν περιγράμματα. Ο Κώδικας Αλυσίδας Freeman χρησιμοποιείται ευρέως: αναπαριστά τα περιγράμματα ως κωδικούς κατεύθυνσης (πάνω, κάτω, αριστερά, δεξιά) σε σχέση με το προηγούμενο pixel, μειώνοντας την αποθήκευση και επιτρέποντας εύκολη σύγκριση σχημάτων. Βιβλιοθήκες όπως η OpenCV το διευκολύνουν αυτό με συναρτήσεις όπως η findContours(), η οποία επιστρέφει τις συντεταγμένες των pixel του περιγράμματος και επιτρέπει φιλτράρισμα (με βάση την έκταση ή την αναλογία πλευρών) για την αφαίρεση θορύβου.

3. Προηγμένες Τεχνικές
Οι παραδοσιακές μέθοδοι λειτουργούν για ελεγχόμενα, υψηλής αντίθεσης περιβάλλοντα, αλλά σε πραγματικές συνθήκες (μη ομοιόμορφο φως, επικαλυπτόμενα αντικείμενα) χρειάζονται προηγμένες προσεγγίσεις:
Προσαρμοστικός Κατώφλι : Υπολογίζει τοπικά κατώφλια για κάθε pixel (σε σχέση με ένα μόνο καθολικό κατώφλι), κατάλληλος για εικόνες με μεταβαλλόμενο φως (π.χ. βιομηχανικά εξαρτήματα κάτω από φώτα εργοστασίου).
Εντοπισμός με Βάση Βαθιάς Μάθησης : Τα Συνελικτικά Νευρωνικά Δίκτυα (CNN) εξάγουν άμεσα τα όρια από τις αρχικές εικόνες, παρακάμπτοντας την επεξεργασία με το χέρι. Μοντέλα όπως τα HED (Holistically-Nested Edge Detector) και RCF (Richer Convolutional Features) συγχωνεύει χαρακτηριστικά CNN πολλαπλών κλιμάκων για χάρτες ακμών υψηλής ανάλυσης, υπερέχοντας σε πολύπλοκα σενάρια (ιατρικές εικόνες, περιβάλλοντα με συνεχή δραστηριότητα)
4. Βασικές Προκλήσεις
Παρά την πρόοδο, παραμένουν πραγματικές προκλήσεις:
Θόρυβος και Φωτισμός : Τα δάπεδα των εργοστασίων, ο χαμηλός φωτισμός ή οι εξωτερικές συνθήκες προκαλούν διακεκομμένες/ψευδείς περιγραφές.
Επικαλυπτόμενα/Καλυμμένα Αντικείμενα : Τα σωροί των εξαρτημάτων ενώνουν τις περιγραφές, καθιστώντας δύσκολη τη διάκριση των επιμέρους σχημάτων.
Διαφανή/Ανακλαστικά Υλικά : Το γυαλί ή το μέταλλο διασκορπίζει το φως, δημιουργώντας ασθενείς/παραμορφωμένες ακμές.
Απόδοση σε πραγματικό χρόνο : Βιομηχανικές εργασίες (έλεγχος στη γραμμή συναρμολόγησης) χρειάζονται 30+ πλαίσια ανά δευτερόλεπτο (FPS). Τα μοντέλα βαθιάς μάθησης απαιτούν βελτιστοποίηση (κβαντοποίηση, επιτάχυνση GPU) για να καλύπτουν τις απαιτήσεις ταχύτητας.
5. Εφαρμογές στην πραγματική ζωή
Η ανίχνευση περιγράμματος κινεί την αυτοματοποίηση σε διάφορους τομείς:
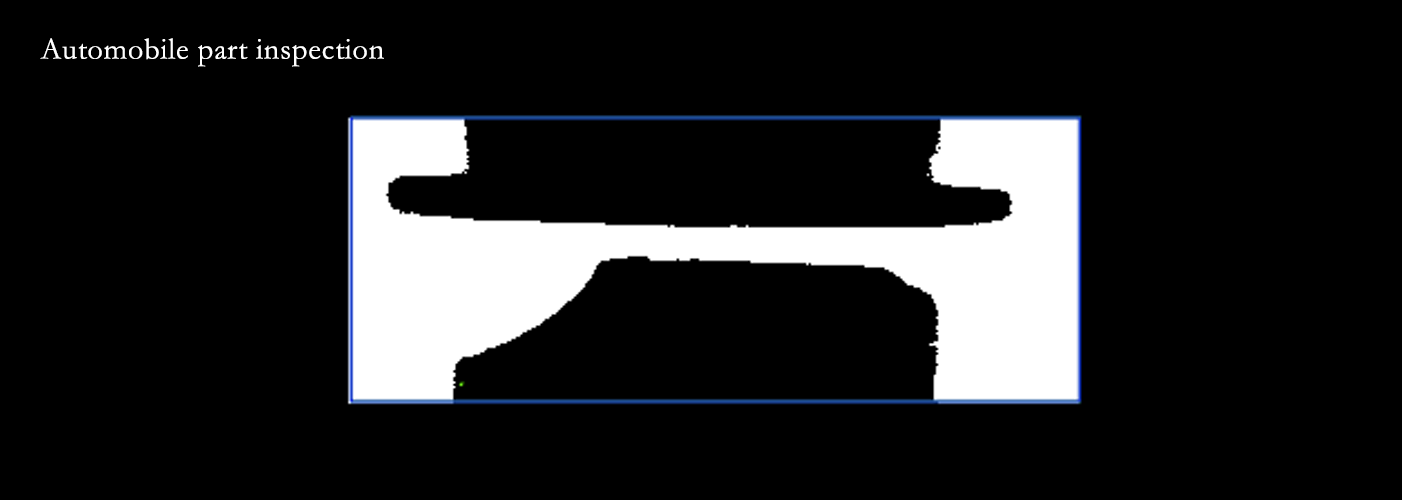
Ελέγχος βιομηχανικής ποιότητας : Ελέγχει ελαττώματα (ρωγμές, πατήματα) στην παραγωγή. Για παράδειγμα, στην αυτοκινητοβιομηχανία επαληθεύεται ότι τα εξαρτήματα του κινητήρα (γρανάζια, αμορτισέρ) ταιριάζουν στα σχέδια περιγράμματος, απορρίπτοντας τα εξαρτήματα εκτός ορίων ανοχής.
Ρομποτική επιλογής και τοποθέτησης : Βοηθά τα ρομπότ να εντοπίζουν αντικείμενα. Στις αποθήκες, βραχίονες ρομπότ χρησιμοποιούν περιγράμματα για να βρίσκουν συσκευασίες σε μεταφορείς, να υπολογίζουν το κέντρο/προσανατολισμό και να ρυθμίζουν τις λαβές.
Ιατρική απεικόνιση : Τμηματοποιεί ανατομικές δομές (όγκους σε αξονικές τομογραφίες, όρια κυττάρων σε πλάκες ιστολογίας) για να υποστηρίξει τη διάγνωση. Τα μοντέλα βαθιάς μάθησης αντιμετωπίζουν καλά τους μεταβλητούς βιολογικούς ιστούς.
Γεωργία : Ταξινομεί φρούτα (μήλα, πορτοκάλια) ως προς το μέγεθος/ωριμότητα μέσω ανάλυσης περιγράμματος και ανιχνεύει ασθένειες των καλλιεργειών από αλλαγές στα περιγράμματα των φύλλων.
Παρακολούθηση κυκλοφορίας : Παρακολουθεί οχήματα, μετρά τη ροή ή εντοπίζει ατυχήματα (μέσω μη συνηθισμένων περιγραμμάτων ή ακίνητων αντικειμένων) χρησιμοποιώντας κάμερες παρακολούθησης.
6. Μελλοντικά Τάσεις
Τρεις τάσεις θα σχηματίσουν την ανίχνευση περιγραμμάτων:
Ενσωμάτωση Edge AI : Ελαφριές μορφές (κβαντισμένα CNNs) σε edge συσκευές (βιομηχανικές κάμερες, drones) επιτρέπουν επεξεργασία σε πραγματικό χρόνο χωρίς εξάρτηση από το cloud – απαραίτητο για αυτόνομα ρομπότ.
Πολυ-Τροπική Συγχώνευση : Η συνδυασμένη χρήση οπτικών δεδομένων με LiDAR/θερμική απεικόνιση βελτιώνει την ανίχνευση σε δύσκολες συνθήκες (π.χ., η θερμική απεικόνιση ενισχύει τα περιγράμματα σε χαμηλό φως· το LiDAR προσθέτει τρισδιάστατο βάθος για επικαλυπτόμενα αντικείμενα).
Εξηγήσιμη Τεχνητή Νοημοσύνη (XAI) : Οι τεχνικές XAI θα διευκρινίσουν πώς τα μοντέλα βαθιάς μάθησης ανιχνεύουν περιγράμματα, δημιουργώντας εμπιστοσύνη σε ζωτικούς τομείς (ιατρική διάγνωση, επιθεώρηση αεροδιαστημικών).
Συμπέρασμα
Η ανίχνευση περιγράμματος στη μηχανική όραση συνδέει τα αρχικά δεδομένα εικόνας με χρήσιμες πληροφορίες, καθώς και με την εξέλιξη των συστημάτων αυτοματισμού και ελέγχου ποιότητας. Από την παραδοσιακή ανίχνευση ακμών μέχρι τη βαθιά μάθηση, έχει εξελιχθεί ώστε να ανταποκρίνεται σε πολύπλοκες προκλήσεις. Καθώς η τεχνολογία προχωράει, θα παραμείνει στο επίκεντρο των έξυπνων συστημάτων, κάνοντας τις μηχανές πιο αποτελεσματικές και αξιόπιστες σε διάφορους τομείς.





