

Consejos para la integración de cámaras de nivel de placa destinados a ingenieros
Selección de la interfaz adecuada para la integración de cámaras a nivel de placa
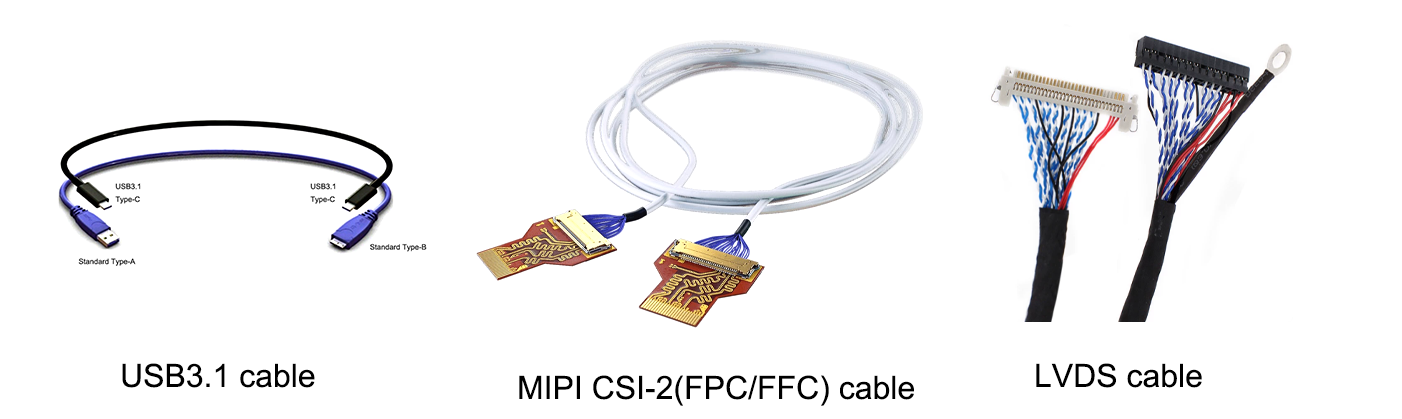
USB 3.1, MIPI CSI-2 y LVDS: compensaciones entre ancho de banda, latencia y sincronización en tiempo real
Los ingenieros integrados enfrentan compromisos críticos al seleccionar interfaces para la integración de cámaras a nivel de placa. USB 3.1 ofrece un ancho de banda elevado (5 Gbps), lo que lo hace adecuado para la transmisión de vídeo en HD, pero su sobrecarga de protocolo introduce una latencia de 5–10 ms, limitando su idoneidad para bucles de control en tiempo real. MIPI CSI-2 ofrece un ancho de banda escalable (hasta 6 Gbps por canal) y sincronización activada por hardware, lo que permite una latencia inferior al milisegundo y una temporización precisa entre múltiples sensores, siendo ideal para automatización industrial y robótica. LVDS proporciona una transmisión determinista y de latencia ultra baja (<1 ms) mediante protocolos seriales sencillos, aunque su ancho de banda por canal está limitado a aproximadamente 655 Mbps, restringiendo su uso a flujos de menor resolución o comprimidos. Los sistemas de visión que requieren una sincronización estrecha entre cámaras deben priorizar MIPI CSI-2; las aplicaciones críticas para la seguridad, como la percepción en vehículos autónomos, se benefician de la previsibilidad temporal de LVDS. USB 3.1 sigue siendo viable para la supervisión HD no en tiempo real y sensible al costo, siempre que la latencia mínima sea aceptable y se validen las restricciones térmicas y de procesamiento.
Mejores prácticas de integridad de señal y diseño de PCB por Interface
La integridad de la señal es específica de la interfaz y constituye la base del rendimiento fiable de las cámaras a nivel de placa. Para USB 3.1, mantenga una impedancia diferencial de 90 Ω con pares de pistas de longitud coincidente (±5 mil), rutas protegidas mediante planos de tierra y una separación estricta respecto a las pistas digitales ruidosas para suprimir las interferencias electromagnéticas (EMI). MIPI CSI-2 requiere una impedancia de 100 Ω por cada par diferencial, coincidencia de longitudes dentro de ±10 mil y evitar el uso de vías cerca de los receptores, especialmente crítico en los pares de alta velocidad que operan por encima de 1,5 Gbps. Los diseños LVDS exigen longitudes cortas de pistas (<10 pulgadas), una impedancia constante de 100 Ω y pistas protectoras (guard traces) para suprimir la diafonía. En todas las interfaces, se deben particionar los planos de tierra para aislar los circuitos analógicos del sensor de los dominios digitales del procesador de señal de imagen (ISP) y del procesador, colocar los condensadores de desacoplamiento a menos de 2 mm de los terminales de alimentación y utilizar configuraciones de capas de 4 o más, con planos de referencia continuos. Un trazado inadecuado es responsable del 32 % de los artefactos de imagen en sistemas de visión prototipo, lo que convierte a la simulación posterior al trazado y a la validación de la impedancia en requisitos obligatorios para diseños críticos para la misión.
Integración mecánica: montaje de la lente y flexibilidad óptica
El montaje preciso de las lentes es esencial: los desalineamientos a escala micrométrica provocan deriva del enfoque, distorsión o pérdida de resolución. Los ingenieros deben equilibrar la rigidez mecánica —crítica para la resistencia a golpes y vibraciones— con la ajustabilidad in situ, lograda normalmente mediante barriles roscados o soportes basados en arandelas. La flexibilidad óptica exige compatibilidad con distintos tipos de lentes (fijas, variables y líquidas) y soporte para el ajuste de la distancia focal mediante mecanismos helicoidales o controladores motorizados. Las diferencias en la expansión térmica entre las lentes y los sensores requieren medidas correctoras —por ejemplo, el uso de materiales con bajo coeficiente de dilatación térmica (CTE), como el Invar o compuestos cerámicos, o montajes cinemáticos—, especialmente en entornos industriales (-40 °C a +85 °C). En la imagen infrarroja o multiespectral, la transparencia del material del sustrato en la banda objetivo (por ejemplo, germanio para la banda LWIR o sílice fundida para la banda UV) se convierte en una restricción de diseño de primer orden. Las interfaces modulares para lentes permiten su sustitución rápida sin necesidad de una recalibración completa, aunque las tolerancias de la distancia al plano de montaje (flange distance) deben mantenerse por debajo de 10 µm para evitar viñeteado o degradación de la función de transferencia de modulación (MTF).

Garantizando una coexistencia robusta a nivel de sistema en los diseños de cámaras a nivel de placa
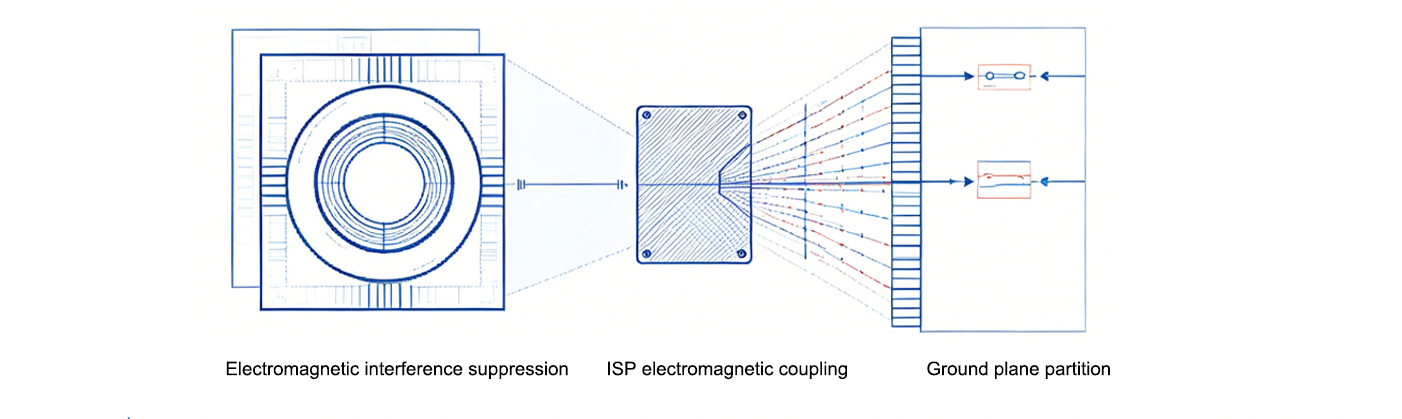
Mitigación de interferencias electromagnéticas (EMI) y partición del plano de tierra para la coexistencia entre sensor y procesador de señal de imagen (ISP)
Los diseños de cámaras a nivel de placa sin carcasa carecen del apantallamiento EMI de los módulos encapsulados, lo que impone una mayor responsabilidad en el aislamiento a nivel de PCB entre los sensores de imagen y los procesadores de señal de imagen (ISP). Los planos de tierra particionados —que separan los dominios analógicos del sensor de los subsistemas digitales del ISP— son esenciales para minimizar el acoplamiento de ruido conducido, ya que la interferencia mixta (analógica y digital) puede introducir armónicos de reloj superiores a 50 dBμV/m (IEC 61000-4-3). Entre las estrategias eficaces se incluyen: conexión a tierra en punto estrella en la entrada de alimentación, pistas protectoras con vías de unión alrededor de redes digitales de alta velocidad, evitar relieves térmicos en las áreas de cobertura de tierra próximas a los sensores y añadir cuentas de ferrita en las líneas de reloj I²C. La integridad de la señal se degrada rápidamente cuando la distancia entre el sensor y el ISP cae por debajo de 3λ de la frecuencia operativa más alta, lo que exige rutas con impedancia controlada y pares diferenciales de longitud coincidente. La prototipación temprana con sondas de EMI de campo cercano (espaciadas 5 mm) permite identificar puntos críticos; el apantallamiento localizado con mu-metal sobre los sensores reduce las emisiones radiadas entre 12 y 18 dB (FCC OET-65). Mantener una separación ≥40 mil entre dominios mixtos (analógico/digital) mejora sistemáticamente la relación señal-ruido (SNR) un 20 % en módulos de alta resolución.
Integración de software y portabilidad del SDK para cámaras a nivel de placa
Soporte de controladores multiplataforma: Linux RT, QNX y RTOS sin capa de abstracción (Bare-Metal RTOS) con Spinnaker
La portabilidad del software entre plataformas es indispensable para las implementaciones de visión embebida que abarcan entornos Linux en tiempo real (RT), QNX y sistemas operativos en tiempo real (RTOS) bare-metal con recursos limitados. Cada sistema operativo impone requisitos distintos en cuanto a temporización, memoria y modelos de controladores; sin embargo, se debe preservar de forma constante la adquisición de píxeles perfecta y la sincronización activada por hardware. Una capa de abstracción de SDK unificada cierra esta brecha: por ejemplo, el SDK Spinnaker ofrece APIs estandarizadas para plataformas x86, ARM y RISC-V, además de admitir de forma nativa la captura de fotogramas en tiempo real, el disparo por hardware y el acceso a los registros del procesador de imagen (ISP). Esto elimina el desarrollo redundante de controladores al migrar desde PCs industriales con Linux RT hacia objetivos basados en microcontroladores con RTOS. Los equipos que aprovechan estos marcos reducen el tiempo de integración hasta en un 40 %, manteniendo al mismo tiempo un comportamiento determinista, incluso bajo condiciones de reducción térmica o escalado de voltaje.
¿Listo para simplificar su integración de cámaras a nivel de placa para la producción OEM?
Sin costura integración de cámaras a nivel de placa es la piedra angular de los sistemas de visión embebida fiables y de alto rendimiento: ningún algoritmo avanzado ni hardware de procesamiento pueden superar una mala selección de interfaz, defectos en la integridad de la señal o un diseño mecánico no optimizado. Al seguir las mejores prácticas de integración probadas en campo y asociarse con un fabricante de cámaras que ofrezca hardware previamente validado, soporte para diseños de referencia y herramientas de software multiplataforma, reducirá las iteraciones de diseño, acelerará el tiempo de comercialización y logrará un rendimiento constante y rentable en la producción en volumen para fabricantes de equipos originales (OEM).
Para soluciones industriales de cámaras a nivel de placa adaptadas a su aplicación de visión embebida, o para acceder a paquetes completos de diseños de referencia, soporte técnico interno y servicios de fabricación OEM personalizados (como los ofrecidos por HIFLY), colabore con un proveedor con amplia experiencia en visión artificial industrial. Los 15 años de experiencia de HIFLY abarcan el diseño de cámaras a nivel de placa, la personalización completa OEM/ODM y la integración de extremo a extremo de sistemas de visión embebida, respaldados por la certificación ISO 9001:2015, el apoyo para el cumplimiento normativo global y servicios técnicos especializados de soporte en fase de diseño. Contáctenos hoy mismo para una consulta sin compromiso, la elaboración de prototipos personalizados o para optimizar su flujo de trabajo de integración de cámaras a nivel de placa.





