

Detección de Contorno por Visión Artificial
En la era de la Industria 4.0 y la automatización inteligente, la visión por máquina se ha convertido en una tecnología clave, permitiendo que las máquinas "vean" e interpreten datos visuales con una precisión que a menudo supera las capacidades humanas. Entre sus funciones principales, detección de contorno es fundamental: extrae las formas de los límites de los objetos a partir de imágenes digitales, sentando la base para tareas como el reconocimiento de objetos, medición de dimensiones, inspección de defectos y manipulación robótica.
1. ¿Qué es la detección de contornos?
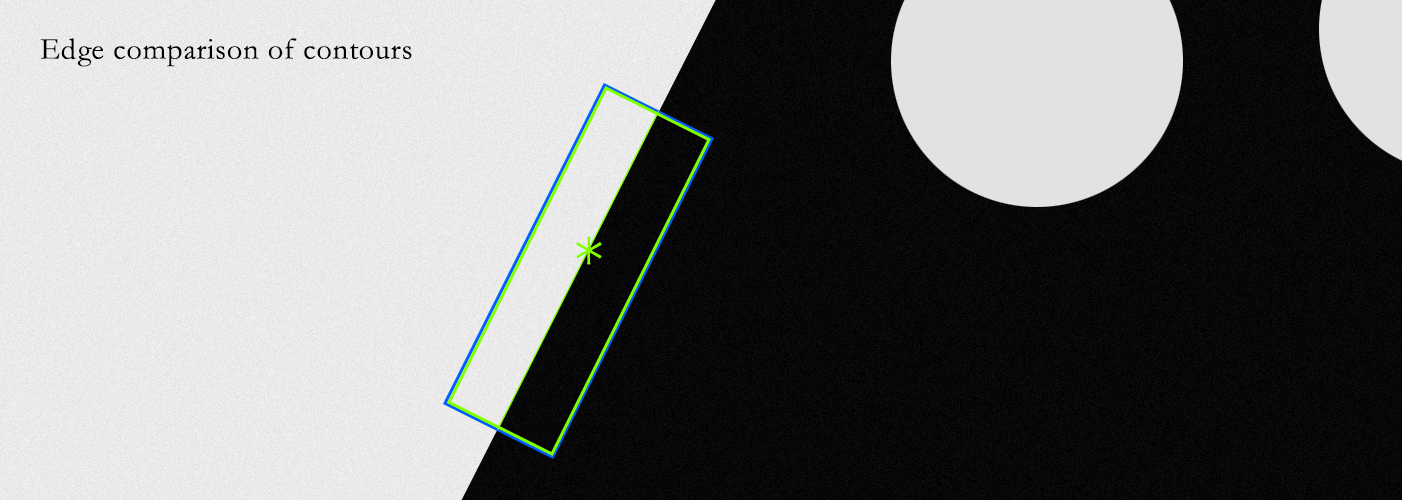
Un "contorno" en el procesamiento de imágenes es una curva que conecta puntos continuos (a lo largo del borde de un objeto) con la misma intensidad o color, separando el objeto de su fondo. A diferencia de los bordes discretos (transiciones de luz a oscuridad a nivel de píxeles), los contornos son bucles continuos (o curvas abiertas para objetos parciales) que representan un objeto en su totalidad, forma , no solo cambios aislados de intensidad.
El objetivo principal de la detección de contornos es simplificar los datos de la imagen: reducir una imagen 2D a líneas de contorno 1D permite a las máquinas analizar eficientemente la geometría de un objeto (tamaño, ángulos, simetría), sin necesidad de procesar cada píxel, algo esencial para aplicaciones en tiempo real donde la velocidad y la precisión son igualmente importantes.
2. Principios básicos
La detección de contornos se basa en dos pasos clave: preprocesamiento (mejora del contraste entre objeto y fondo) y extracción de contornos (identificación de puntos en el borde). Estos pasos abordan defectos de la imagen original, como ruido, iluminación desigual o bajo contraste, que pueden dificultar la identificación de los bordes.
2.1 Preprocesamiento
Las imágenes en bruto rara vez tienen límites claros, por lo que el preprocesamiento es vital:
Conversión a escala de grises : La mayoría de los algoritmos utilizan imágenes en escala de grises de un solo canal (simplificando los datos de tres canales RGB a uno, ya que el color suele ser irrelevante).
Reducción del ruido : El suavizado gaussiano suaviza las imágenes con un kernel gaussiano, reduce el ruido de alta frecuencia manteniendo los cambios importantes de intensidad, fundamental para evitar bordes falsos causados por interferencias del sensor o fluctuaciones de luz.
Detección de bordes : Identifica cambios de intensidad a nivel de píxel (bordes) que conforman contornos. El Detector de bordes de Canny (un método de varias etapas: suavizado, cálculo del gradiente, supresión no máxima, umbralización por histéresis) es el estándar de oro, produciendo bordes finos y continuos. El operador de Sobel, que resalta bordes horizontales/verticales, funciona bien para límites gruesos.
Umbralización : Convierte mapas de bordes en escala de grises a imágenes binarias (blanco/negro), con el primer plano (bordes del objeto) como 1 y el fondo como 0, simplificando el trazado de contornos.
2.2 Extracción de contornos
Después del preprocesamiento, los algoritmos trazan píxeles de primer plano conectados para formar contornos. El Código de Cadena de Freeman es ampliamente utilizado: representa contornos como códigos de dirección (arriba, abajo, izquierda, derecha) en relación con el píxel anterior, reduciendo el almacenamiento y permitiendo una comparación fácil de la forma. Bibliotecas como OpenCV simplifican esto con funciones como findContours(), que devuelve las coordenadas de los píxeles del contorno y permite filtrar (por área o relación de aspecto) para eliminar ruido.

3. Técnicas Avanzadas
Los métodos tradicionales funcionan en entornos controlados y con alto contraste, pero escenarios del mundo real (iluminación desigual, objetos superpuestos) requieren enfoques avanzados:
Umbralización Adaptativa : Calcula umbrales locales para cada píxel (en contraste con un único umbral global), ideal para imágenes con iluminación variable (por ejemplo, piezas industriales bajo luces de fábrica).
Detección Basada en Aprendizaje Profundo : Las Redes Neuronales Convolucionales (CNN) extraen directamente los límites a partir de imágenes en bruto, saltándose el preprocesamiento manual. Modelos como HED (Holistically-Nested Edge Detector) y RCF (Características Convolucionales Enriquecidas) fusiona características CNN multiescala para mapas de bordes de alta resolución, destacando en escenas complejas (imágenes médicas, entornos desordenados).
4. Desafíos Clave
A pesar de los avances, persisten obstáculos en entornos reales:
Ruido e Iluminación : Los pisos de fábrica, luz baja o condiciones exteriores provocan contornos rotos/falsos.
Objetos Solapados/Ocultos : Las piezas apiladas fusionan contornos, dificultando distinguir formas individuales.
Materiales Transparentes/Reflectantes : El vidrio o el metal dispersan la luz, creando bordes débiles/distorsionados.
Rendimiento en tiempo real : Las tareas industriales (inspección en líneas de ensamblaje) necesitan 30+ cuadros por segundo (FPS). Los modelos de aprendizaje profundo requieren optimización (cuantificación, aceleración GPU) para cumplir con las demandas de velocidad.
5. Aplicaciones en el mundo real
La detección de contornos impulsa la automatización en múltiples industrias:
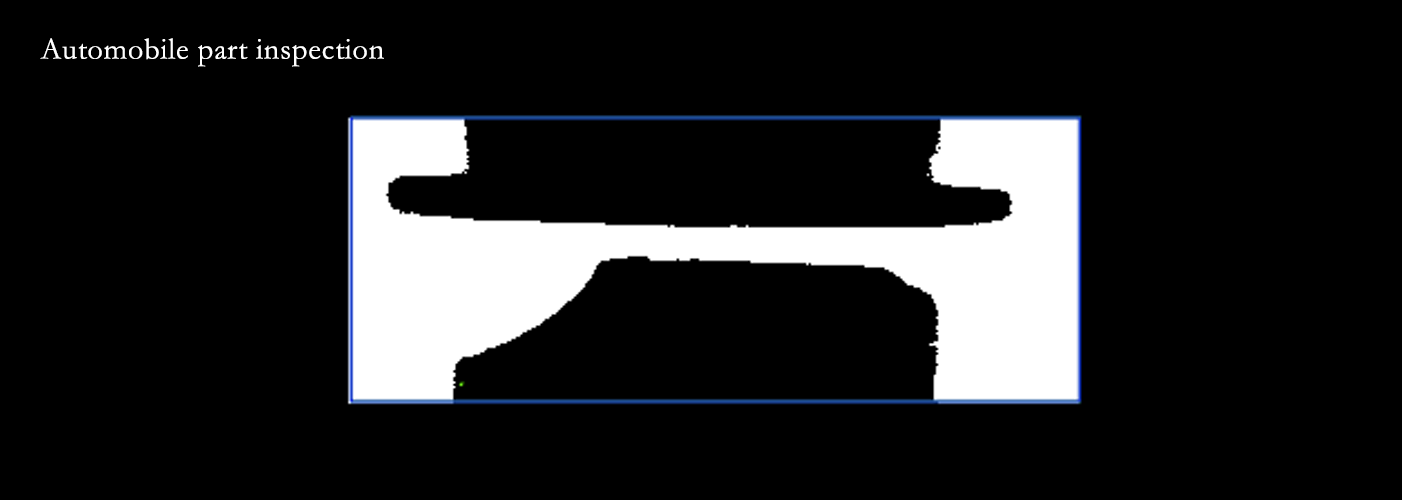
Inspección de calidad industrial : Verifica defectos (grietas, abolladuras) en la fabricación. Por ejemplo, en la producción automotriz se verifica que componentes del motor (engranajes, juntas) coincidan con los contornos de diseño, rechazando piezas fuera de tolerancia.
Robótica de selección y colocación : Ayuda a los robots a localizar objetos. En almacenes, los brazos robóticos usan contornos para encontrar paquetes en transportadores, calcular el centro/orientación y ajustar el agarre.
Mercado de imágenes médicas : Segmenta estructuras anatómicas (tumores en tomografías computarizadas, límites celulares en láminas de histología) para apoyar diagnósticos. Los modelos de aprendizaje profundo manejan bien los tejidos biológicos variables.
Agricultura : Clasifica frutas (manzanas, naranjas) por tamaño/grado de madurez mediante análisis de contornos y detecta enfermedades en cultivos a partir de cambios en los bordes de las hojas.
Monitoreo del Tráfico : Rastrea vehículos, mide el flujo o identifica accidentes (mediante contornos inusuales u objetos estacionarios) utilizando cámaras de vigilancia.
6. Tendencias Futuras
Tres tendencias moldearán la detección de contornos:
Integración de IA en el Edge : Modelos ligeros (CNNs cuantizados) en dispositivos de borde (cámaras industriales, drones) permiten procesamiento en tiempo real sin depender de la nube, fundamental para robots autónomos.
Fusión Multi-Modal : La combinación de datos visuales con LiDAR/imágenes térmicas mejora la detección en condiciones difíciles (por ejemplo, imágenes térmicas mejoran los límites en baja luz; LiDAR agrega profundidad 3D para objetos superpuestos).
Inteligencia Artificial Explicable (XAI) : Las técnicas de XAI clarificarán cómo los modelos de aprendizaje profundo detectan contornos, generando confianza en campos críticos (diagnóstico médico, inspección aeroespacial).
Conclusión
La detección de contornos por visión artificial conecta los datos de imagen brutos con información útil, impulsando la automatización y el control de calidad. Desde la detección tradicional de bordes hasta el aprendizaje profundo, ha evolucionado para afrontar desafíos complejos. A medida que avanza la tecnología, seguirá siendo fundamental en sistemas inteligentes, haciendo que las máquinas sean más capaces y confiables en diversos sectores.





