

Guide des caméras au niveau de la carte pour les systèmes de vision embarquée
Destinée aux équipementiers (OEM), aux intégrateurs de systèmes et aux équipes d’ingénierie spécialisées dans la vision embarquée, la caméra au niveau carte constitue le bloc de construction fondamental des systèmes de vision embarquée compacts, fiables et hautes performances. Ce guide complet décrit les critères essentiels de sélection, les protocoles d’interface, les exigences relatives à l’écosystème logiciel ainsi que les bonnes pratiques d’intégration physique des caméras au niveau carte, afin d’aider votre équipe d’ingénierie à optimiser les conceptions de vision embarquée pour les applications industrielles, médicales, automobiles et liées aux infrastructures intelligentes.
Critères clés de sélection des caméras au niveau carte
Équilibrer les performances du capteur avec les contraintes de puissance et thermiques
Sélectionner caméras au niveau carte nécessite l'optimisation des capacités des capteurs par rapport aux budgets énergétiques et aux limites thermiques. Les capteurs haute résolution (par exemple, 12 Mpx et plus) consomment 30 à 50 % d'énergie en plus que leurs équivalents de 2 à 5 Mpx, générant une chaleur qui compromet la fiabilité dans les conceptions sans ventilateur. Les systèmes de vision industrielle déployés dans des espaces confinés tirent le plus grand bénéfice de capteurs à faible bruit consommant moins de 1 W tout en maintenant un rapport signal/bruit (RSB) supérieur à 40 dB. Les ingénieurs doivent valider les performances thermiques à l’aide d’imagerie infrarouge pendant la phase de prototypage : des températures soutenues supérieures à 85 °C accélèrent la dégradation du capteur par un facteur 4 (Journal of Embedded Systems, 2023).

Adaptation de la résolution, de la fréquence d’images et de la plage dynamique aux besoins de l’application
Un alignement précis des spécifications de la caméra sur les exigences opérationnelles évite la surconception et l’inflation des coûts. Examinez ces associations critiques :
| Application | Spécifications optimales | Raisonnement |
|---|---|---|
| Prise et placement robotisés | 5 Mpx à 60 images/seconde, plage dynamique de 120 dB | Allie vitesse de reconnaissance des pièces et conditions d’éclairage variables propres aux entrepôts |
| Endoscopie médicale | 1080p à 30 images/seconde, plage dynamique > 75 dB | Réduit au minimum le flou de bougé dans les zones peu éclairées tout en diminuant la bande passante nécessaire aux données |
| Surveillance du trafic | 4K @ 24 ips, WDR (140 dB) | Capture des plaques d’immatriculation à l’aube/au crépuscule sans artefacts liés au mouvement |
Les modes à grande dynamique (HDR) sont essentiels dans les environnements où l’éclairage varie, bien qu’ils ajoutent une latence de traitement de 15 à 20 ms. Le choix de la fréquence d’images doit tenir compte de la vitesse des objets : pour l’inspection de convoyeurs se déplaçant à 2 m/s, une fréquence d’au moins 120 ips est requise afin de limiter la floue de bougé à moins de 0,5 pixel.
Protocoles d’interface pour une intégration fiable de caméras au niveau carte
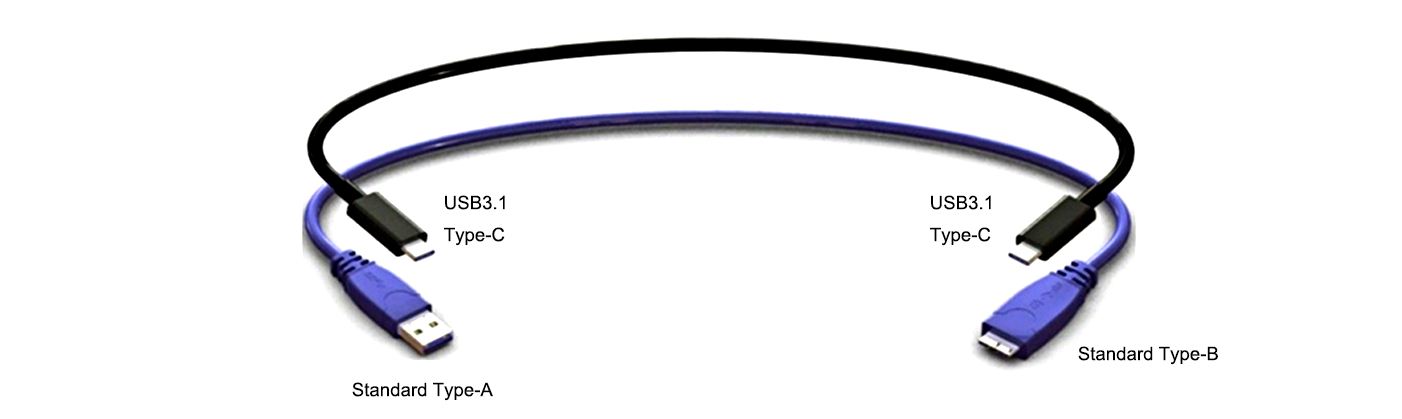
USB 3.1, MIPI CSI-2 et LVDS : bande passante, latence et adéquation dans des applications réelles
Le choix du protocole d’interface optimal pour votre caméra au niveau carte nécessite un équilibre entre bande passante, latence et contraintes environnementales. L’interface USB 3.1 offre un débit de 5 Gbps avec une simplicité « brancher-et-utiliser », idéale pour l’imagerie médicale ou les bornes interactives, où la longueur des câbles reste inférieure à 3 mètres. MIPI CSI-2 fournit une bande passante évolutif (jusqu’à 6 Gbps via 4 voies) et une consommation d’énergie extrêmement faible, ce qui en fait la norme de facto pour les systèmes mobiles et embarqués basés sur ARM. LVDS assure une immunité supérieure aux bruits électriques dans des environnements perturbés, tels que l’automatisation industrielle, bien que sa bande passante inférieure à 1 Gbps limite son utilisation dans les cas d’application haute résolution. Pour la robotique en temps réel, la latence inférieure à 5 ms de MIPI CSI-2 surpasse la plage de 10 à 20 ms de l’USB 3.1. Privilégiez les protocoles en fonction des besoins de déploiement : USB 3.1 pour la mise au point rapide, MIPI pour les dispositifs périphériques à contrainte énergétique, et LVDS pour les machines industrielles.
Écosystème logiciel et prise en charge des SDK pour les caméras au niveau carte
SDK multiplateformes (Spinnaker, Aravis) et compatibilité avec les RTOS ARM/x86
Les kits de développement logiciel (SDK) robustes sont indispensables pour accélérer le déploiement des systèmes de vision avec des caméras au niveau carte. Des solutions multiplateformes telles que Spinnaker et Aravis offrent des interfaces normalisées qui masquent la complexité matérielle, permettant ainsi la portabilité du code entre les environnements de développement et de production. Spinnaker prend en charge diverses architectures — notamment x86, ARM et les systèmes d’exploitation temps réel (RTOS) — grâce à des API unifiées, ce qui permet aux ingénieurs de réaliser des prototypes sur ordinateur de bureau puis de déployer sans heurts sur des cibles embarquées. Par ailleurs, des frameworks open source tels qu’Aravis offrent une conformité générique GenICam indépendante du fournisseur pour les systèmes basés sur Linux. Cette flexibilité architecturale réduit de 40 % les obstacles d’intégration, selon des études sur l’adoption de la vision embarquée (2023). Les principaux critères à prendre en compte comprennent la compatibilité avec les RTOS afin d’assurer une latence déterministe dans les systèmes de commande industrielle, la prise en charge de plusieurs architectures pour assurer la pérennité face aux migrations matérielles futures, ainsi que des couches d’abstraction simplifiant le développement des pilotes. La compatibilité avec des environnements RTOS légers garantit un fonctionnement fiable dans des applications à ressources limitées, telles que les robots mobiles autonomes ou les dispositifs médicaux, où l’exécution continue est une exigence absolue.
Intégration physique : facteur de forme, montage de l'objectif et robustesse environnementale
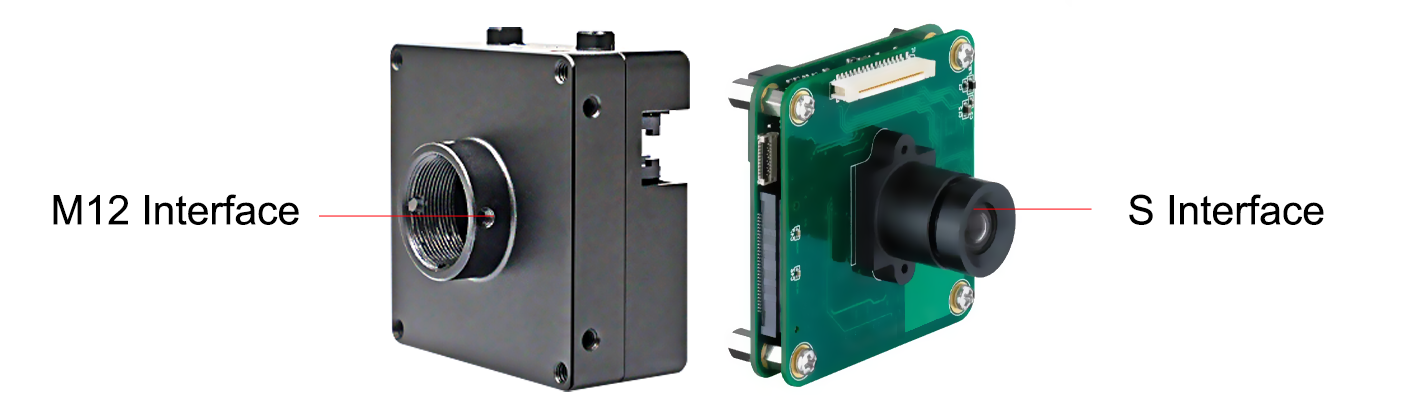
Interfaces M12, S-Mount et sur mesure — champ de vision et flexibilité optique
Les interfaces de montage des objectifs influencent directement les performances optiques des systèmes de vision embarquée. Les montures normalisées M12 offrent des ajustements économiques du champ de vision (FOV) pour les applications industrielles, tandis que le montage S-Mount fournit des solutions compactes adaptées aux conceptions à contrainte d'espace. Les interfaces sur mesure permettent de répondre à des exigences spécifiques en matière de champ de vision, telles que des angles ultra-larges ou des configurations télécentriques. Les facteurs optiques critiques comprennent :
- Contrôle des distorsions distorsion en barillet < 0,1 % pour préserver la précision des mesures en métrologie
- Stabilité mécanique mécanismes de verrouillage empêchant la dérive de mise au point lors d'une exposition aux vibrations de 15 G
- Sensibilité dans le proche infrarouge prise en charge de la longueur d'onde à 850 nm améliorant les performances en faible luminosité
- Résistance environnementale joints étanches certifiés IP67 protégeant contre la pénétration de particules
Conception thermique et conformité CEM dans les déploiements sans ventilateur ni boîtier
La gestion thermique devient critique lors de l'utilisation de caméras au niveau carte dans des environnements sans ventilateur où la température dépasse 60 °C. Les stratégies efficaces comprennent des dissipateurs thermiques en cuivre capables d’évacuer des charges thermiques supérieures à 5 W, des matériaux d’interface thermiquement stables préservant l’intégrité du capteur sur une plage de températures allant de –40 °C à 85 °C, et une optimisation de la disposition des circuits imprimés (PCB) permettant d’isoler les composants générateurs de chaleur des capteurs d’image. La compatibilité électromagnétique (CEM) garantit un fonctionnement fiable dans des environnements industriels électriquement bruyants. La conformité exige le respect des normes clés :
| Exigence | Standard | Application critique |
|---|---|---|
| Émissions rayonnantes | Partie 15 de la FCC, classe B | Les diagnostics médicaux |
| Immunité | IEC 61000-4-3 | Assemblage automobile |
| Protection ESD | IEC 61000-4-2 | Traitement des aliments |
Une mise à la terre adéquate et des boîtiers blindés réduisent de 40 % les risques d’interférences dans les déploiements non logés (EMC Journal, 2023).
Prêt à optimiser votre système de vision embarquée avec une caméra personnalisée au niveau carte ?
La caméra au niveau carte est le cœur des systèmes de vision embarquée fiables, compacts et hautes performances — aucune solution prête à l’emploi ne peut égaler la personnalisation, l’efficacité énergétique et la flexibilité d’intégration d’une conception de caméra au niveau carte adaptée aux besoins spécifiques d’un équipementier. En alignant les performances du capteur, les protocoles d’interface, le support logiciel et le facteur de forme physique sur vos exigences d’application uniques, vous accélérez votre délai de mise sur le marché, réduisez les coûts de la nomenclature (BOM) et garantissez une fiabilité constante à long terme, même dans les environnements embarqués les plus exigeants.

Pour des solutions de caméras au niveau carte, conçues pour les applications industrielles de vision embarquée OEM, ou pour concevoir un système de vision entièrement intégré comprenant des objectifs complémentaires, des systèmes d’éclairage et des outils de traitement embarqué (tels que proposés par HIFLY), associez-vous à un fournisseur expérimenté dans le domaine de la vision industrielle par machine et spécialisé dans la personnalisation OEM. Les 15 années d’expérience de HIFLY couvrent la conception de caméras au niveau carte, la fabrication entièrement personnalisée OEM/ODM, ainsi que l’intégration complète de systèmes de vision embarquée — soutenue par la certification ISO 9001:2015, un accompagnement en matière de conformité réglementaire mondiale et des services dédiés d’ingénierie d’intégration. Contactez-nous dès aujourd’hui pour une consultation sans engagement, la réalisation de prototypes sur mesure ou la conception d’une caméra au niveau carte optimisée pour votre projet de vision embarquée.





