

Différence Entre Les Caméras de Zone Et Les Caméras à Balayage Linéaire
Les caméras de type area scan et les caméras de type line scan présentent des différences significatives en termes de principes d'imagerie, de scénarios d'application, etc., comme suit :
1. Différences fondamentales : structure et méthode d'imagerie
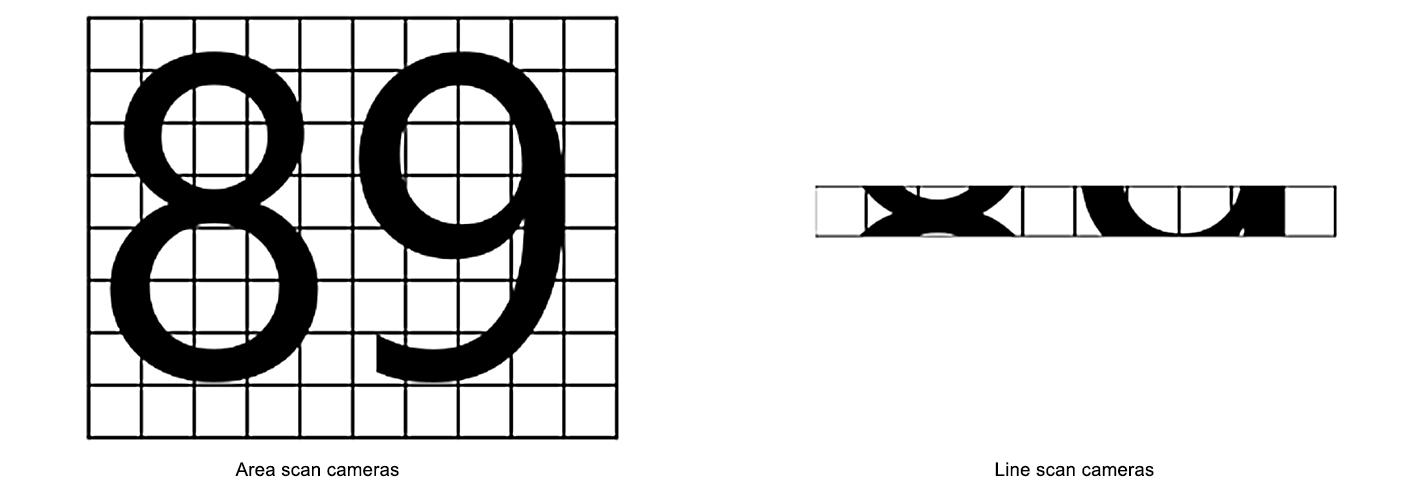
Caméras matricielles : Le capteur est un plan bidimensionnel (similaire à une matrice). Une image bidimensionnelle complète peut être capturée directement en une seule exposition. Les appareils couramment utilisés, tels que les téléphones mobiles et les reflex numériques, appartiennent à la catégorie des caméras area scan.
Caméras linéaires : Le capteur est linéaire (une matrice unidimensionnelle). Il doit être utilisé conjointement avec le mouvement de l'objet ou de la caméra (par exemple, le mouvement d'un tapis roulant, le balayage de la caméra) afin de capturer les images ligne par ligne, puis de les assembler en une image bidimensionnelle. Cela ressemble à l'action de balayer le sol avec un balai : l'ensemble de la surface est couverte grâce au mouvement.
2. Différences en termes de scénarios applicables
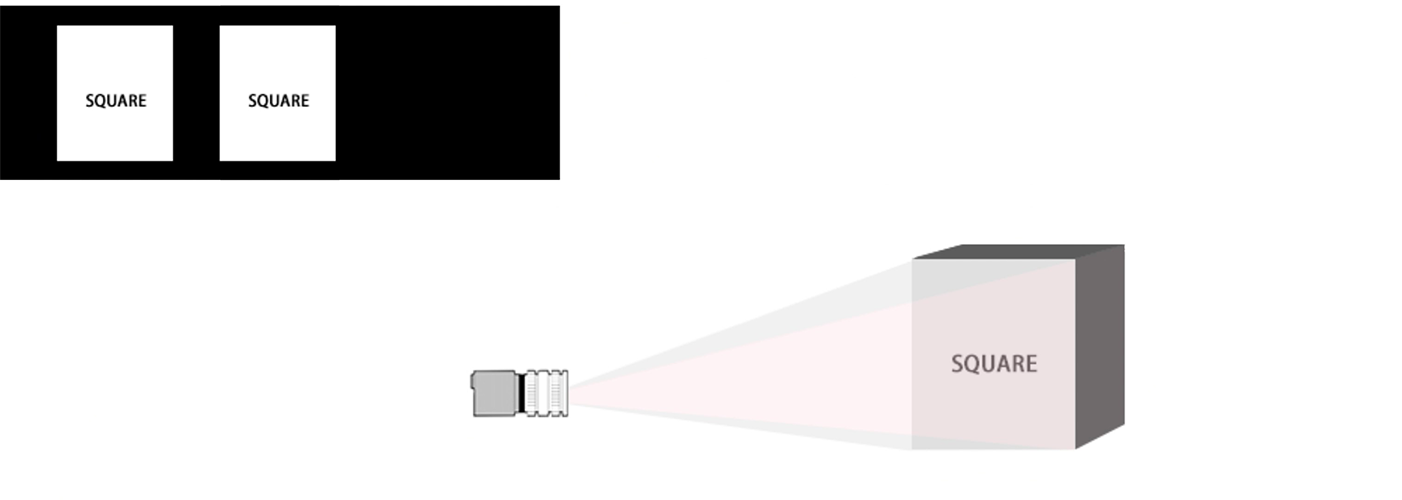
Caméras matricielles : Adapté pour capturer des objets statiques ou se déplaçant lentement, comme les photos d'identité, l'inspection visuelle de produits immobiles, la photographie courante, etc. Leur avantage réside dans une manipulation simple et une acquisition rapide d'images complètes.
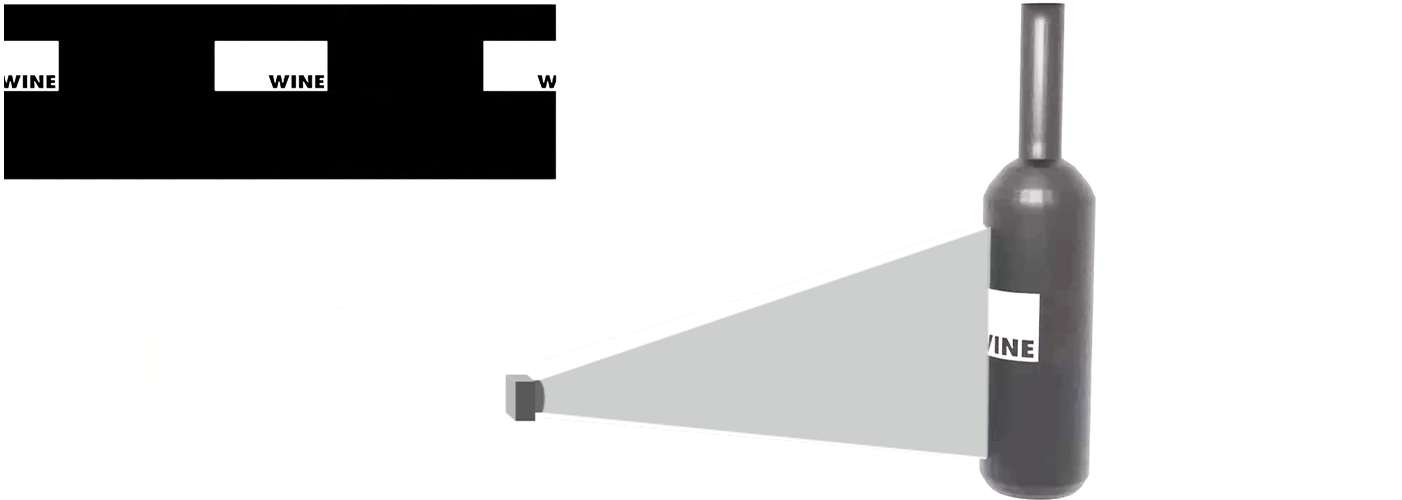
Caméras linéaires : Adaptée pour filmer des objets en mouvement rapide sur de grandes surfaces, comme l'inspection continue de tissus et de papier, la numérisation des routes, le contrôle qualité des produits imprimés, etc. Leur avantage réside dans une résolution d'image plus élevée et des détails plus nets dans les scénarios de longues bandes ou de mouvement continu.
3. D ifférence de principes de fonctionnement
La différence principale entre les principes de fonctionnement des caméras matricielles et des caméras linéaires réside dans la structure du capteur et la méthode d'imagerie, comme suit :
(1).Principe de fonctionnement des caméras matricielles
Structure du capteur : Le cœur est un capteur matriciel bidimensionnel (comme un CCD ou un CMOS), composé de nombreux pixels formant une matrice plane (similaire à une grille).
Processus d'imagerie : Lorsque l'obturateur s'ouvre, la lumière illumine l'ensemble du capteur matriciel via l'objectif en même temps. Chaque pixel du capteur reçoit la lumière de manière synchrone et la convertit en signaux électriques. Après traitement, une image bidimensionnelle complète (incluant les informations de largeur et de hauteur) est directement générée.
Caractéristiques : L'acquisition de l'image entière peut être réalisée en une seule exposition, sans dépendre d'un mouvement externe, ce qui convient à la capture d'objets statiques ou se déplaçant lentement.
(2).Principe de Fonctionnement des Caméras Linéaires
Structure du capteur : Le cœur de l'appareil est un capteur linéaire unidimensionnel, dont les pixels sont alignés en ligne droite (ne contenant qu'une seule rangée de pixels).
Processus d'imagerie : Le capteur à matrice linéaire ne peut collecter à chaque fois que les informations d'image d'une seule ligne (contenant uniquement des informations de largeur). Il doit s'appuyer sur le mouvement uniforme de l'objet (par exemple, entraîné par un convoyeur) ou le mouvement de balayage de la caméra elle-même pour que le capteur collecte des images de ligne à différentes positions, ligne après ligne. Ensuite, ces images linéaires continues sont assemblées par un logiciel pour former finalement une image bidimensionnelle complète (largeur + longueur formée par le mouvement).
Caractéristiques : Il dépend de la coopération du mouvement externe, convient à l'imagerie d'objets continus, rapides ou de grande surface, et peut maintenir une résolution élevée pendant le mouvement.
4. Autres différences importantes
Résolution et fréquence d'images : Les caméras linéaires disposent généralement de plus de pixels dans une seule direction et peuvent réaliser un imageage haute résolution à vitesse élevée ; les caméras matricielles ont des fréquences d'images plus flexibles (nombre de prises par seconde), adaptées à la capture d'images instantanées.
Coût et complexité : Les caméras à balayage linéaire doivent être équipées de dispositifs de contrôle du mouvement, ce qui rend le système plus complexe et le coût plus élevé ; les systèmes de caméras à balayage surfacique sont simples et le coût est relativement faible.





