

Détection de contour par vision industrielle
À l'ère de l'Industrie 4.0 et de l'automatisation intelligente, la vision par ordinateur est devenue une technologie clé, permettant aux machines de « voir » et d'interpréter des données visuelles avec une précision souvent supérieure à celle des capacités humaines. Parmi ses fonctions essentielles, détection de contour est cruciale : elle extrait les formes des contours des objets à partir d'images numériques, servant de base à des tâches telles que la reconnaissance d'objets, la mesure des dimensions, l'inspection de défauts et la manipulation robotique.
1. Qu'est-ce que la détection de contours ?
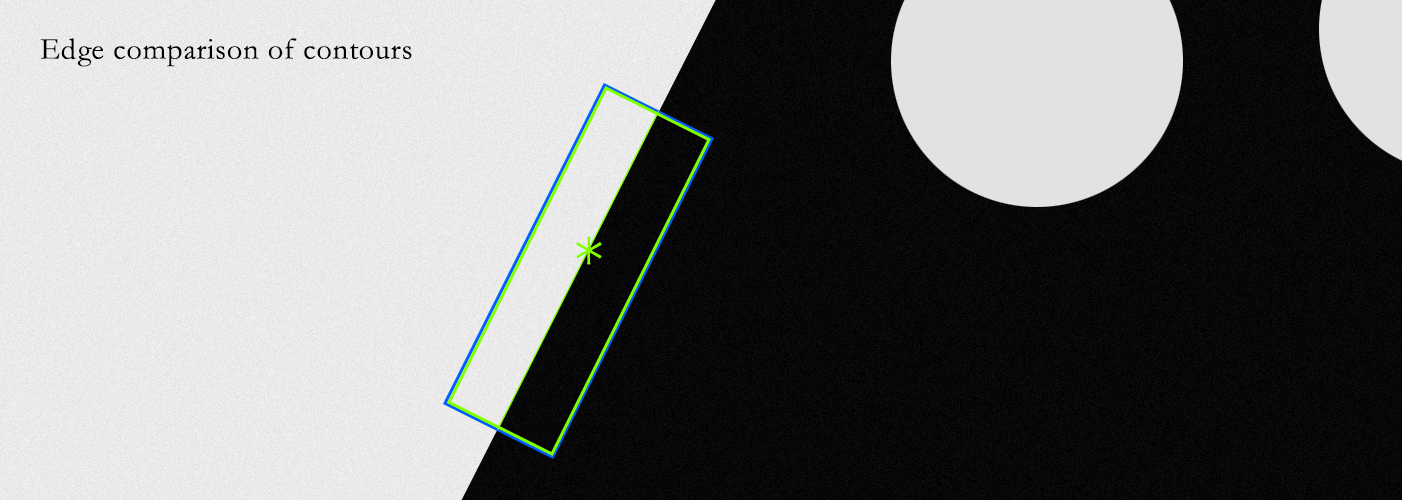
Une « contour » en traitement d'image est une courbe reliant des points continus (le long de la limite d'un objet) ayant la même intensité ou la même couleur, séparant l'objet de son arrière-plan. Contrairement aux arêtes discrètes (transitions pixelisées entre clair et foncé), les contours sont des boucles continues (ou des courbes ouvertes pour des objets partiels) qui représentent un objet forme , et pas seulement des changements d'intensité isolés.
L'objectif principal de la détection de contours est de simplifier les données d'image : réduire une image 2D à des lignes de contour 1D permet aux machines d'analyser efficacement la géométrie d'un objet (taille, angles, symétrie), sans avoir à traiter chaque pixel — essentiel pour les applications en temps réel où la vitesse et la précision sont également importantes.
2. Principes de base
La détection de contours repose sur deux étapes clés : prétraitement (amélioration du contraste entre l'objet et l'arrière-plan) et extraction des contours (identification des points limites). Ces étapes permettent de corriger les défauts d'une image brute comme le bruit, l'éclairage inégal ou le faible contraste qui masquent les limites.
2.1 Prétraitement
Les images brutes ont rarement des frontières claires, donc le prétraitement est essentiel :
Conversion en niveaux de gris : La plupart des algorithmes utilisent des images en niveaux de gris à un canal (simplifiant les données issues des trois canaux RVB en un seul, car la couleur est souvent sans importance).
Réduction du bruit : Le flou gaussien adoucit les images à l'aide d'un noyau gaussien, réduisant le bruit haute fréquence tout en conservant les changements majeurs d'intensité — essentiel pour éviter les faux contours dus aux interférences du capteur ou aux fluctuations de lumière.
Détection des contours : Identifie les variations d'intensité au niveau des pixels (bords) qui constituent les contours. Le Détecteur de Canny (une méthode multi-étapes : lissage, calcul du gradient, suppression non-maximale, seuillage par hystérésis) est la référence, produisant des bords fins et continus. L'opérateur de Sobel, qui met en évidence les bords horizontaux/verticaux, convient aux contours épais.
Seuillage : Convertit les cartes de bords en niveaux de gris en images binaires (noir/blanc), avec le premier plan (bords des objets) à 1 et l'arrière-plan à 0 — simplifiant ainsi le tracé des contours.
2.2 Extraction des contours
Après le prétraitement, les algorithmes tracent les pixels de premier plan connectés pour former des contours. Le Code de chaîne de Freeman est largement utilisé : il représente les contours sous forme de codes de direction (haut, bas, gauche, droite) par rapport au pixel précédent, réduisant ainsi la taille de stockage et permettant une comparaison facile des formes. Des bibliothèques comme OpenCV simplifient cette tâche grâce à des fonctions telles que findContours(), qui renvoie les coordonnées des pixels du contour et permet un filtrage (par aire ou rapport d'aspect) pour éliminer le bruit.

3. Techniques avancées
Les méthodes traditionnelles conviennent aux environnements contrôlés et à fort contraste, mais les situations réelles (éclairage inégal, objets superposés) nécessitent des approches avancées :
Seuillage adaptatif : Calcule des seuils locaux pour chaque pixel (par rapport à un seuil global unique), idéal pour les images avec un éclairage variable (par exemple, des pièces industrielles sous lumières d'usine).
Détection basée sur l'apprentissage profond : Les réseaux de neurones convolutifs (CNN) extraient directement les contours à partir des images brutes, en sautant les étapes de prétraitement manuelles. Des modèles tels que HED (Holistically-Nested Edge Detector) et RCF (Fonctionnalités Convolutives Étendues) fusionne des fonctionnalités CNN multi-échelles pour produire des cartes de contours haute résolution, performant particulièrement bien dans des scènes complexes (images médicales, environnements encombrés).
4. Défis Principaux
Malgré les progrès réalisés, des obstacles du monde réel persistent :
Bruit et Éclairage : Les sols d'usine, les faibles lumières ou les environnements extérieurs provoquent des contours brisés/faux.
Objets Superposés/Obstrués : Les pièces empilées fusionnent les contours, rendant difficile la distinction des formes individuelles.
Matériaux Transparent/Réfléchissants : Le verre ou le métal diffusent la lumière, créant des bords faibles/déformés.
Performance en temps réel : Les tâches industrielles (contrôle sur chaîne d'assemblage) nécessitent 30 images par seconde (FPS) ou plus. Les modèles d'apprentissage profond nécessitent une optimisation (quantification, accélération GPU) pour satisfaire les exigences de vitesse.
5. Applications pratiques
La détection de contours alimente l'automatisation dans divers secteurs :
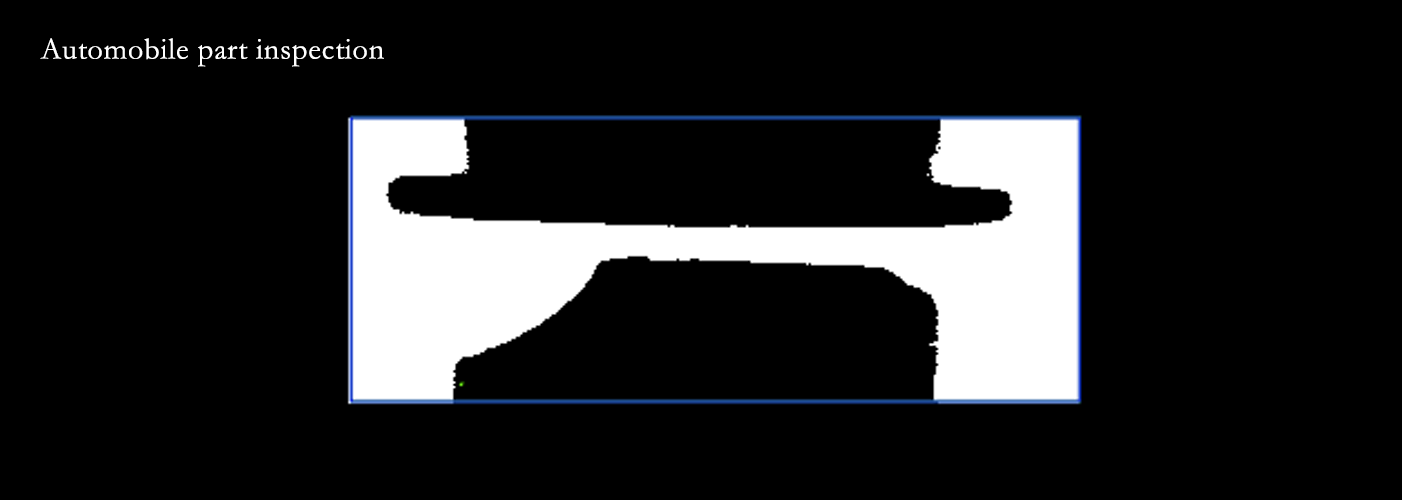
Inspection de la qualité industrielle : Vérifie les défauts (fissures, bosses) dans la fabrication. Par exemple, lors de la production automobile, on vérifie que les composants moteur (engrenages, joints) correspondent aux contours prévus et les pièces hors tolérance sont rejetées.
Prise et placement robotisés : Aide les robots à localiser des objets. Dans les entrepôts, les bras robotiques utilisent les contours pour trouver des colis sur des convoyeurs, calculer le centre/l'orientation, et ajuster leur prise.
Imagerie médicale : Segmente les structures anatomiques (tumeurs sur des scanners CT, limites cellulaires sur des coupes histologiques) pour faciliter le diagnostic. Les modèles d'apprentissage profond gèrent efficacement les tissus biologiques variables.
Agriculture : Trie les fruits (pommes, oranges) selon leur taille/maturité grâce à l'analyse des contours et détecte les maladies des cultures à partir des changements de contours des feuilles.
Surveillance du trafic : Suit les véhicules, mesure le flux ou identifie des accidents (par des contours inhabituels ou des objets stationnaires) à l'aide de caméras de surveillance.
6. Tendances futures
Trois tendances façonneront la détection de contours :
Intégration de l'IA d'extrémité : Des modèles légers (CNN quantifiés) sur des appareils embarqués (caméras industrielles, drones) permettent un traitement en temps réel sans dépendance au cloud, essentiel pour les robots autonomes.
Fusion multi-capteurs : La combinaison de données visuelles avec des données LiDAR/d'imagerie thermique améliore la détection dans des conditions difficiles (ex. l'imagerie thermique renforce les contours en faible luminosité ; le LiDAR ajoute une profondeur 3D pour les objets superposés).
IA explicative (XAI) : Les techniques d'IA explicative permettront d'expliquer comment les modèles d'apprentissage profond détectent les contours, renforçant ainsi la confiance dans des domaines critiques (diagnostic médical, inspection aérospatiale).
Conclusion
La détection de contour par vision par machine relie les données d'images brutes à des informations exploitables, alimentant l'automatisation et le contrôle qualité. Évoluant depuis la détection d'arêtes traditionnelle jusqu'au deep learning, elle s'est adaptée pour relever des défis complexes. Avec l'avancement de la technologie, elle restera au cœur des systèmes intelligents, rendant les machines plus performantes et fiables à travers les industries.





