

Le processus de sélection de produits pour un projet de vision machine
Savez-vous quelles étapes sont impliquées dans un processus de sélection de projet de vision complète ? Aujourd'hui, nous explorerons comment sélectionner les composants pour un projet de vision machine.
- Obtenez les exigences du client
Lorsque nous recevons un échantillon de détection, que devrions-nous faire en premier ? Bien sûr, il s'agit de communiquer avec le client sur ses besoins, car le projet doit chercher à répondre aux besoins du client autant que possible. En comprenant les exigences spécifiques de détection par la communication, nous pouvons faire un premier choix en fonction de savoir si l'objet est statique ou dynamique - c'est-à-dire, sélectionner le volet global ou roulant de la caméra industrielle. Après tout, pour photographier des objets en mouvement, un volet global est nécessaire.
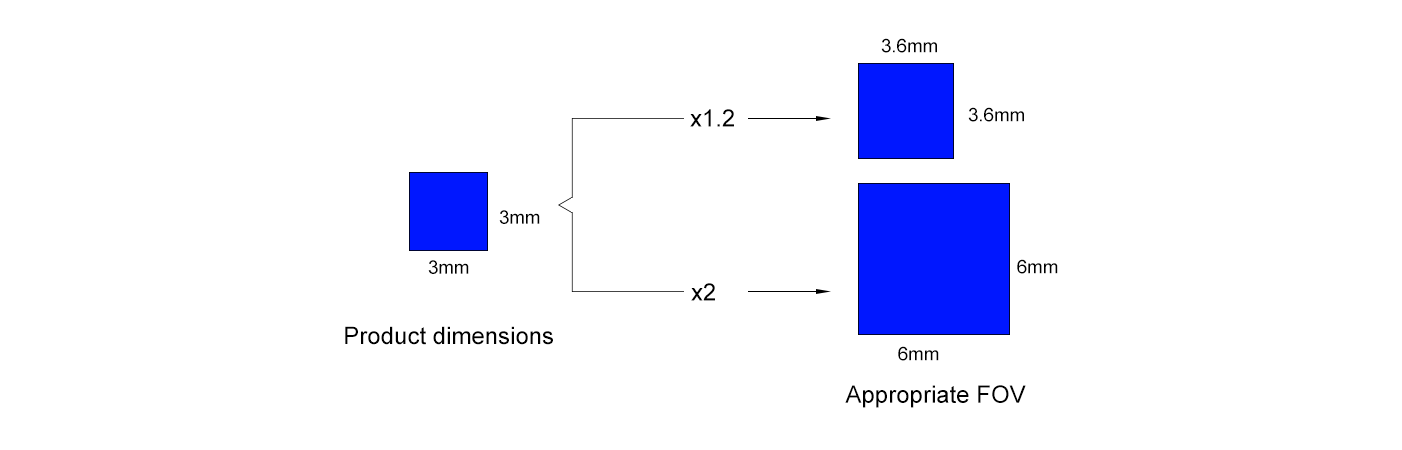
- Déterminez le champ O d'vue (FOV)
Ensuite, nous devons déterminer la taille de FOV appropriée en fonction des dimensions du produit. Pour une image, le FOV d'imagerie de l'appareil photo est généralement le plus adapté pour être 1,2 à 2 fois la taille du produit.
- Sélectionner ce qui convient Industriel Lentilles
Il est bien connu que les objectifs des caméras industrielles incluent des objectifs télécentriques et des objectifs FA (Factory Automation), et que les méthodes de calcul du FOV pour différents objectifs varient, donc nous devons analyser des situations spécifiques. Cependant, puisque le calcul du FOV ne peut se faire sans la taille du capteur, nous devons d'abord calculer les dimensions du capteur.

La taille du capteur est calculée en multipliant la résolution par la taille du pixel. Prenons un appareil photo industriel de 1,3 mégapixels comme exemple :
•Largeur du capteur = 1280 × 4,8 μm = 6,144 mm
• Hauteur du capteur = 1024 × 4,8 μm = 4,915 mm
Pour les objectifs télécentriques, le FOV est calculé comme la taille du capteur divisée par l'amplification de l'objectif. En utilisant la même caméra avec un objectif télécentrique 0,5× :
• Largeur d'imagerie = 6,144 mm ÷ 0,5 = 12,288 mm
• Hauteur d'imagerie = 4,915 mm ÷ 0,5 = 9,83 mm
Pour les objectifs industriels FA, le calcul du FOV est taille du capteur × distance de travail ÷ longueur focale. En utilisant la même caméra avec une distance de travail de 100 mm et une longueur focale de 8 mm :
• Largeur horizontale = 6,144 mm × 100 ÷ 8 = 76,8 mm
• Hauteur horizontale = 4,915 mm × 100 ÷ 8 = 61,4 mm
Tous ces calculs ont pour but de sélectionner les caméras et objectifs appropriés en fonction du FOV et de la précision requise. Par conséquent, l'étape suivante consiste à calculer la précision de la caméra.
- Calculer L'industrie Précision de la caméra
Pour les objectifs télécentriques, la précision théorique de la caméra égale la taille du pixel divisée par le grossissement de l'objectif télécentrique. Reprenons l'exemple précédent (objectif télécentrique 0,5×) :
• Précision théorique = 4,8 μm ÷ 0,5 = 9,6 μm
Pour les objectifs industriels FA, la précision théorique est calculée comme FOV ÷ résolution. Lorsque le FOV est de 72 mm :
• Précision théorique = 72 mm ÷ 1280 = 0,056 mm
Les précisions ci-dessus sont des précisions théoriques, et il y a souvent une différence significative entre la théorie et la pratique. Par conséquent, la précision réelle nécessite un calcul supplémentaire. Par exemple :
Avec l'éclairage frontal, la précision réelle est 3 à 5 fois supérieure à la précision théorique.
Avec l'éclairage arrière de la vision par machine, la précision réelle peut atteindre 1 à 2 fois la précision théorique.

Une plus grande précision peut être obtenue si l'algorithme peut interpoler au niveau du sous-pixel.
Comme nous le savons tous, l'éclairage est indispensable pour l'inspection visuelle - un bon éclairage peut assurer la moitié du succès d'un projet visuel. Il est donc nécessaire de choisir une source lumineuse de taille appropriée pour les tests d'éclairage. Par exemple :
Pour les lumières annulaires, les lumières de surface ou les lumières en bol destinées à la vision par machine, la taille de la source lumineuse est généralement de 10 % à 20 % plus grande que le FOV.
Pour les barres lumineuses de vision machine, la longueur de la source lumineuse est généralement de 20 % à 30 % plus longue que le FOV.
Ce qui précède est le processus complet de sélection des composants pour un projet de vision machine. En suivant ces étapes, nous pouvons rapidement déterminer les produits nécessaires pour le projet. Vous pouvez également nous laisser un message, et nous vous aiderons à sélectionner les produits les plus adaptés aux besoins de votre projet.





