

सही लाइन स्कैन कैमरा चुनने के लिए सुझाव
लाइन स्कैन कैमरा के मूल सिद्धांत: वास्तुकला, सिद्धांत और प्रमुख लाभ
लाइन स्कैन इमेजिंग कैसे क्षेत्र स्कैन से भिन्न होती है—गति के कारण होने वाले धुंधलापन को समाप्त करना और अनंत ऊर्ध्वाधर रिज़ॉल्यूशन सक्षम करना
क्षेत्र स्कैन कैमरे एक साथ पूरी 2D छवियाँ लेते हैं, जबकि लाइन स्कैन कैमरे अलग तरीके से काम करते हैं। उनमें केवल पिक्सेल की एक पंक्ति होती है, जो वस्तुओं के कैमरा दृश्य के सामने से गुजरने के साथ-साथ धीरे-धीरे छवियों का निर्माण करती है। प्रणाली घूर्णी या रैखिक एन्कोडर जैसी चीजों का उपयोग करके गति के साथ समकालिकता (सिंक) बनाए रखती है, इसलिए यहाँ तक कि वस्तुएँ बहुत तेजी से गति कर रही हों—कभी-कभी 10 मीटर प्रति सेकंड से अधिक—तो भी धुंधलापन नहीं होता है। यहाँ सबसे महत्वपूर्ण बात यह है कि ऊर्ध्वाधर रिज़ॉल्यूशन सिद्धांत रूप से असीमित रूप से बढ़ाया जा सकता है। छवि की ऊँचाई कितनी होगी, यह पूरी तरह से इस बात पर निर्भर करता है कि कोई वस्तु कैमरे के सामने कितनी दूर तक गुजरती है, न कि सेंसर के आकार द्वारा सीमित होता है। इसी कारण, लाइन स्कैन प्रौद्योगिकि अर्धचालकों के निर्माण के दौरान उनकी जाँच या 3,000 मिमी चौड़े विशाल धातु कुंडलों को ट्रैक करने जैसे सटीक कार्यों में उत्कृष्ट प्रदर्शन करती है। पारंपरिक क्षेत्र स्कैन प्रणालियाँ इन परिस्थितियों को संभालने के लिए या तो विशाल स्टिच की गई छवियाँ बनाती हैं या प्रक्रिया में महत्वपूर्ण विवरणों को खो देती हैं।
मुख्य घटकों की व्याख्या: रैखिक सेंसर, लाइन रेट इंजन, एन्कोडर इंटरफ़ेस और वास्तविक समय समकालिकता तर्क
इस सटीकता को सक्षम करने के लिए चार परस्पर निर्भर घटक हैं:
- रैखिक सेंसर , आमतौर पर CMOS या CCD ऐरे जिनमें 1–16k सक्रिय पिक्सेल होते हैं, क्षैतिज रिज़ॉल्यूशन और स्पेक्ट्रल प्रतिक्रिया को परिभाषित करते हैं।
- लाइन रेट इंजन पिक्सेल डेटा को 10–140 kHz की दर से संसाधित करते हैं, जो वस्तु के वेग को नमूना लेने की आवृत्ति के साथ गतिशील रूप से मिलाते हैं।
- एन्कोडर इंटरफ़ेस यांत्रिक गति को सटीक ट्रिगर सिग्नल में परिवर्तित करते हैं—चतुर्भुज डिकोडिंग के माध्यम से ±0.01% गति समकालिकता प्राप्त करते हैं।
- वास्तविक समय समकालिकता तर्क कंपन-प्रेरित झिंझोड़ या क्षणिक गति परिवर्तन की भरपाई करता है, लगातार स्कैन के दौरान सब-पिक्सेल रजिस्ट्रेशन को बनाए रखता है।
इन तत्वों के साथ मिलकर, यह बेलनाकार सतहों, अनंत वेब्स और तापीय रूप से अस्थिर सामग्रियों की विकृति-मुक्त इमेजिंग का समर्थन करता है—जो क्षेत्र-आधारित वास्तुकला द्वारा मौलिक रूप से अप्राप्य क्षमताएँ हैं।
लाइन रेट, गति की गति और स्थानिक रिज़ॉल्यूशन का सटीक मिलान
नियंत्रक समीकरण: Δx = v / fline—और पिक्सेल-से-मिमी कैलिब्रेशन के लिए इसका उपयोग कैसे करें
लाइन स्कैन इमेजिंग में सटीक स्थानिक मापन प्राप्त करना वास्तव में इस बात पर निर्भर करता है कि क्या वस्तु की गति (v) कैमरा की लाइन दर (fline) के साथ ठीक से मेल खाती है। इसके मूल में एक मूलभूत सूत्र है: डेल्टा x = v / fline, जो हमें यह बताता है कि प्रत्येक पिक्सेल कितनी वास्तविक दूरी को दर्शाता है। मान लीजिए कि हम एक कन्वेयर बेल्ट को देख रहे हैं जो 500 मिलीमीटर प्रति सेकंड की गति से चल रही है और हमारा कैमरा 10 किलोहर्ट्ज़ पर सेट है। यह गणना लगभग 0.05 मिलीमीटर प्रति पिक्सेल के रिज़ॉल्यूशन के बराबर होती है। इन प्रणालियों के कैलिब्रेशन के दौरान, विश्वसनीय वेग मापन प्राप्त करना अत्यंत महत्वपूर्ण होता है। अधिकांश लोग इस उद्देश्य के लिए लेज़र डॉपलर वेलोसिमीटर का उपयोग करते हैं, फिर लाइन दर को इतना समायोजित करते हैं जब तक कि वे अपने अभीष्ट डेल्टा x मान तक नहीं पहुँच जाते। और उन विचलनों पर सावधान रहें। यदि विचलन ±2% से अधिक हो जाता है, तो त्रुटियाँ महत्वपूर्ण अनुप्रयोगों में दिखाई देने लगती हैं, जैसे कि प्रिंटेड सर्किट बोर्ड के ट्रेस की चौड़ाई की जाँच करने में, जहाँ सटीकता का विशेष महत्व होता है।
एन्कोडर-आधारित समक्रमण: उच्च कंपन या परिवर्तनशील गति वाले वातावरण में सब-पिक्सेल रजिस्ट्रेशन सुनिश्चित करना
जब मशीनें काँपती हैं या उनकी गति अप्रत्याशित रूप से बदलती है, तो इससे समयबद्धता (टाइमिंग) संबंधी समस्याएँ उत्पन्न होती हैं, जिससे छवियाँ कम तीव्र (शार्प) हो जाती हैं और मापन को लगातार दोहराना कठिन हो जाता है। एन्कोडर को गति प्रणाली के स्थिति प्रतिक्रिया (पोजीशन फीडबैक) के साथ सिंक्रनाइज़ करके, हम यह निश्चित कर सकते हैं कि छवियाँ कब कैप्चर की जाएँ। इसका अर्थ यह है कि भले ही गति में जितना भी 15% तक का परिवर्तन हो, हम फिर भी गुणवत्ता नियंत्रण के लिए इतनी महत्वपूर्ण सब-पिक्सल स्तर की रजिस्ट्रेशन प्राप्त कर सकते हैं। आँकड़े भी खुद बात करते हैं: घूर्णी एन्कोडर कोणों को 0.001 डिग्री तक माप सकते हैं, जबकि रैखिक एन्कोडर केवल 1 माइक्रोमीटर के भीतर स्थितियों को ट्रैक कर सकते हैं। ये क्षमताएँ कठिन औद्योगिक वातावरणों में सब कुछ बदल देती हैं। सोचिए स्टील मिलों के बारे में, जहाँ सब कुछ लगातार काँपता रहता है, या टेक्सटाइल कारखानों के बारे में, जहाँ तनाव क्षण-प्रति बदलता रहता है। उचित एन्कोडर सिंक्रनाइज़ेशन के साथ, प्रणालियाँ वास्तविक दोषों का पता लगाती हैं, बजाय गलती से अच्छे उत्पादों को अस्वीकार करने के। अध्ययनों से पता चलता है कि इस दृष्टिकोण से झूठे अस्वीकरणों में पुरानी विधियों की तुलना में लगभग 40% की कमी आती है, जो केवल मुक्त रूप से चलती हैं और कोई ट्रिगर बिंदु नहीं रखतीं।

अनुप्रयोग-आधारित चयन मानदंड सामान्य औद्योगिक उपयोग के मामलों के लिए
वेब निरीक्षण: तनाव परिवर्तन का प्रबंधन, सिलाई निरंतरता और वास्तविक समय में दोष स्थानीकरण
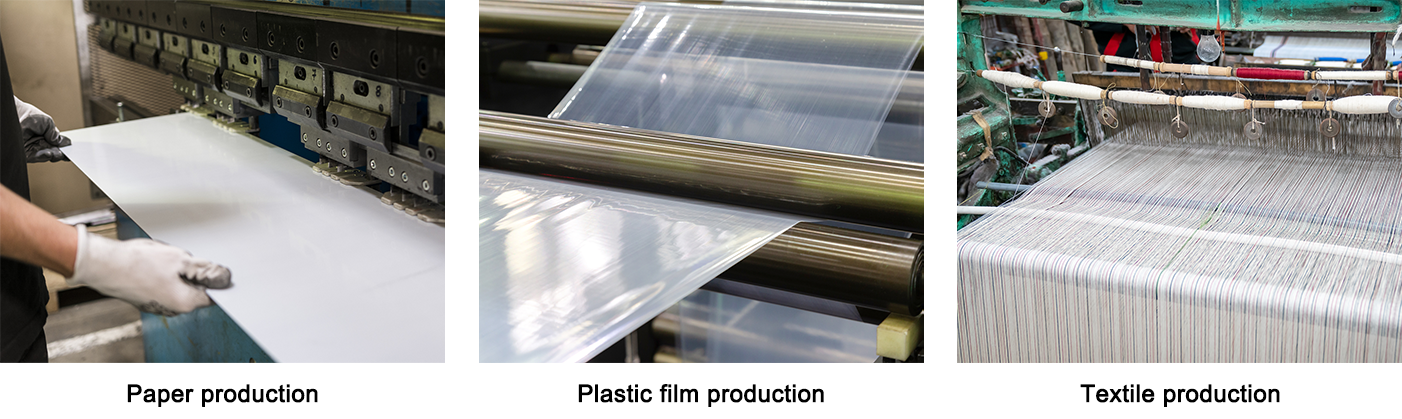
जब कागज, प्लास्टिक की फिल्में, धातु की पन्नी या कपड़े के वेब जैसी निरंतर वेब सामग्रियों के साथ काम किया जाता है, तो उचित लाइन स्कैन कैमरों का चयन करना उत्पादन फर्श पर सबसे महत्वपूर्ण तीन मुख्य विचारों पर निर्भर करता है। पहली चुनौती प्रक्रिया के दौरान तनाव परिवर्तनों के कारण उत्पन्न होने वाली गति के उतार-चढ़ाव से संबंधित है। इसका सामना करने के लिए, प्रणालियों को कम से कम 20 किलोहर्ट्ज़ की आवृत्ति पर चलने वाले अनुकूलनशील नियंत्रकों और एन्कोडर प्रतिक्रिया लूप्स की आवश्यकता होती है, ताकि चित्र पूरी चौड़ाई के अनुदिश पिक्सेल-दर-पिक्सेल संरेखित बने रहें। दूसरा, लाइनों के बीच कोई अंतराल न होने के लिए चित्रों को एक साथ सटीक रूप से जोड़ने के लिए पिक्सेल ऐरे के सावधानीपूर्ण ओवरलैप की आवश्यकता होती है। निर्माता आमतौर पर अंतिम निरीक्षण परिणामों में निरंतरता बनाए रखने के लिए एक माइक्रोसेकंड से भी बेहतर समकालिकता का लक्ष्य रखते हैं। तीसरा, दोषों का पता लगाना जैसे ही वे घटित होते हैं, ऑनबोर्ड प्रोसेसिंग शक्ति पर भारी निर्भरता रखता है। कई आधुनिक प्रणालियाँ अब थ्रेशोल्ड डिटेक्शन जैसे मूल छवि विश्लेषण कार्यों को त्वरित करने के लिए एफपीजीए चिप्स का उपयोग करती हैं, जिससे वे उत्पादों को अस्वीकृत किए जाने से पहले केवल पाँच मिलीसेकंड के भीतर ही समस्याओं को चिह्नित कर सकती हैं। 2023 के हालिया शोध में यह दिखाया गया कि एरिया स्कैन से लाइन स्कैन प्रौद्योगिकी पर स्विच करने से आठ मीटर प्रति सेकंड की लाइन गति पर काम करते समय दोष का पता लगाने की दर लगभग 92% तक बढ़ गई, जिसके कारण आजकल अधिकांश कन्वर्टर इस स्विच को अपना रहे हैं।
बेलनाकार भाग का स्कैनिंग: कोणीय रिज़ॉल्यूशन मैपिंग, घूर्णी एनकोडर संरेखण और FOV विकृति के जोखिम
जब बोतलों, बेयरिंग्स या कार शाफ्ट जैसे घूर्णन करने वाले घटकों के साथ काम किया जाता है, तो कोणीय रिज़ॉल्यूशन कार्य के लिए सही सेंसर का चयन करने में महत्वपूर्ण भूमिका निभाता है। मूल सूत्र कुछ इस प्रकार का होता है: N = π × व्यास ÷ (आरपीएम × 60 × आवश्यक स्थानिक रिज़ॉल्यूशन)। इन संख्याओं को सही ढंग से प्राप्त करना महत्वपूर्ण है, क्योंकि गलत संरेखित घूर्णी एन्कोडर समस्याएँ उत्पन्न कर सकते हैं। लगभग आधे समय में, ये असंरेखन 15% से अधिक अरीय विरूपण का कारण बनते हैं, जिसी कारण से कई तकनीशियन पहले क्वाड्रेचर सिग्नल का उपयोग करके अपनी स्थापना की जाँच करते हैं। एक और बात जिस पर ध्यान रखना चाहिए, वह है प्रकाशिक विरूपण। सामान्य लेंस वक्र किनारों पर छवियों को विकृत कर देते हैं, जिससे जो 'बैरल विरूपण' कहलाता है, वह उत्पन्न होता है। इसीलिए कुछ अनुप्रयोग टेलीसेंट्रिक ऑप्टिक्स का उपयोग करने के लिए स्विच कर जाते हैं, जो पूरे दृश्य क्षेत्र में मापन त्रुटियों को 0.1% से कम बनाए रखते हैं। ऑटोमोटिव शाफ्ट निरीक्षण के लिए, जहाँ चमक (ग्लैर) एक समस्या है, 8-बिट से 12-बिट सेंसर पर स्विच करने से काफी अंतर पड़ता है। अधिकांश कार्यशालाएँ बताती हैं कि जब वे अपग्रेड करती हैं, तो गलत पठनों में लगभग 70% की कमी आती है, हालाँकि परिणाम विशिष्ट परिस्थितियों के आधार पर भिन्न हो सकते हैं।
लाइन स्कैन कैमरा बनाम एरिया स्कैन कैमरा: अधिकतम ROI के लिए प्रत्येक का चयन कब करें
पाँच निर्णायक परिदृश्य जहाँ एक लाइन स्कैन कैमरा अतुलनीय प्रदर्शन और लागत दक्षता प्रदान करता है
जबकि एरिया स्कैन कैमरे विच्छिन्न, स्थिर या कम-गति वाली वस्तुओं के लिए अभी भी आदर्श हैं, लाइन स्कैन प्रौद्योगिकी पाँच उच्च-मात्रा वाले औद्योगिक संदर्भों में उत्कृष्ट प्रदर्शन — और मजबूत ROI — प्रदान करती है:
- उच्च-गति वेब निरीक्षण (कागज़, फॉयल, फिल्म), जहाँ गति के कारण धुंधलापन एरिया स्कैन की सटीकता को कम कर देता है; लाइन स्कैन 70 kHz से अधिक की दर से विकृति-मुक्त 1D स्लाइस को कैप्चर करता है, जिससे किलोमीटर-स्तरीय छवि निर्माण सुगम हो जाता है।
- धातु स्ट्रिप निगरानी गर्म रोलिंग के दौरान, जहाँ तापीय ड्रिफ्ट और संरचनात्मक कंपन उप-पिक्सल पंजीकरण को बनाए रखने के लिए एन्कोडर-समकालिक अधिग्रहण की आवश्यकता होती है।
- वस्त्र उत्पादन जहाँ कपड़े की लचीलापन और तनाव परिवर्तनशीलता को वास्तविक समय में पिक्सेल कैलिब्रेशन के माध्यम से प्रबंधित किया जाता है — बहु-कैमरा एरिया स्कैन सेटअप में अंतर्निहित स्टिचिंग दोषों से बचा जाता है।
- घूर्णनशील बेलनाकार भागों का 360° निरीक्षण जहां कोणीय रिज़ॉल्यूशन मैपिंग 2,000 RPM से अधिक की गति पर माइक्रॉन-स्तर की दोष डिटेक्शन सुविधा प्रदान करती है।
- बड़े क्षेत्र की स्कैनिंग (सौर पैनल, एयरोस्पेस कॉम्पोजिट्स), जहां लाइन स्कैन सिस्टम बहु-कैमरा संरेखण और कैलिब्रेशन की महंगी आवश्यकता को समाप्त कर देता है।
इन अनुप्रयोगों में, लाइन स्कैन प्रणालियाँ हार्डवेयर और एकीकरण लागत को 30–60% तक कम कर देती हैं, जबकि क्षेत्र स्कैन प्रणालियों में गति से उत्पन्न होने वाली गलत अस्वीकृतियों को लगभग 15% तक कम कर देती हैं। उनकी स्केलेबिलिटी और एकल-सेंसर वास्तुकल्प उच्च-उत्पादन विनिर्माण वातावरण में 8–12 महीने के भीतर आरओआई (रिटर्न ऑन इन्वेस्टमेंट) प्रदान करते हैं।

क्या आप अपने औद्योगिक अनुप्रयोग के लिए सही लाइन स्कैन कैमरा चुनने के लिए तैयार हैं?
सही लाइन स्कैन कैमरा विश्वसनीय, उच्च-गति औद्योगिक निरीक्षण की नींव है—कोई भी एल्गोरिथ्म या सॉफ़्टवेयर आपकी लाइन गति, रिज़ॉल्यूशन की आवश्यकताओं या उत्पादन वातावरण के अनुकूल नहीं चुने गए कैमरे की कमी की भरपाई नहीं कर सकता है। लाइन दर, सेंसर रिज़ॉल्यूशन, एन्कोडर सिंक्रनाइज़ेशन और प्रकाशिक डिज़ाइन को अपने विशिष्ट अनुप्रयोग के अनुरूप समायोजित करके, आप बिना किसी अंतराल के, माइक्रोन-सटीक निरीक्षण को अनलॉक करें, गलत अस्वीकृतियों में कमी लाएं, और अपने विनिर्माण संचालन के लिए मापने योग्य आरओआई (रिटर्न ऑन इन्वेस्टमेंट) प्राप्त करें।
वेब निरीक्षण, बेलनाकार स्कैनिंग या बड़े प्रारूप वाली इमेजिंग आवश्यकताओं के लिए औद्योगिक-गुणवत्ता वाले लाइन स्कैन कैमरा समाधानों के लिए, या पूर्णतः एकीकृत मशीन विज़न प्रणाली के निर्माण के लिए—जिसमें पूरक प्रकाश व्यवस्था, लेंस और एन्कोडर समकालन उपकरण शामिल हों (जैसा कि HIFLY द्वारा प्रदान किया जाता है)—उस प्रदाता के साथ साझेदारी करें जो औद्योगिक मशीन विज़न विशेषज्ञता में गहराई से जुड़ा हुआ हो। हाईफ्लाई का 15 वर्षों का अनुभव उच्च-गति 10 गीगाबिट ईथरनेट 8K लाइन स्कैन कैमराओं, बहु-वर्णक्रमीय इमेजिंग प्रणालियों और अंत से अंत तक के औद्योगिक निरीक्षण समाधानों तक फैला हुआ है—जो ISO 9001:2015 प्रमाणन, 30+ आविष्कार पेटेंट्स और 30+ देशों में 2,500+ ग्राहकों के समर्थन द्वारा समर्थित है। अपने संचालन के लिए सही लाइन स्कैन कैमरा चुनने के लिए आज ही हमसे संपर्क करें; यह एक बिना किसी दायित्व की परामर्श सेवा है।





