

एक होस्ट विज़न सिस्टम में कितने इंडस्ट्रियल कैमरे सपोर्ट कर सकता है?
आधुनिक दृश्य प्रणालियों में, एक होस्ट (उदा., कंप्यूटर या सर्वर) की क्षमता का निर्धारण करना कि वह कितने कैमरों को समर्थन कर सकता है, प्रणाली डिज़ाइन, स्केलिंग और लागत अनुकूलन के लिए महत्वपूर्ण प्रश्न है। उत्तर कई अंतर्संबद्ध कारकों पर निर्भर करता है, जिनमें हार्डवेयर क्षमताएँ, सॉफ्टवेयर की कुशलता, औद्योगिक कैमरा विनिर्देशों और अनुप्रयोग की आवश्यकताओं को शामिल किया गया है। यह लेख इन मुख्य चर राशियों का अन्वेषण करता है और दृश्य प्रणाली में कैमरा क्षमता का अनुमान लगाने के लिए एक ढांचा प्रदान करता है।
1. हार्डवेयर घटक और उनका प्रभाव
होस्ट की हार्डवेयर किसी कैमरा के समर्थन की आधारभूत है, जिसमें दो मुख्य पहलूओं का बड़ा योगदान है।
1.1 प्रोसेसिंग इकाइयाँ: CPU और GPU
सीपीयू छवि प्रोसेसिंग कार्यों की विस्तृत सरणी का संबल देती है, मूल फ़िल्टरिंग से लेकर जटिल मशीन लर्निंग अनुमान तक। उच्च-विपुलता या उच्च-फ़्रेम-दर कैमरों से बड़े डेटा आयाम उत्पन्न होते हैं, सीपीयू को तनाव में डालते हैं। बहु-कोर सीपीयू, जैसे इंटेल i9 या एएमडी थ्रेडरिपर, कोरों के बीच कार्यों को वितरित करने के लिए सक्षम हैं जिससे समानांतर प्रोसेसिंग होती है। दूसरी ओर, जीपीयू दृष्टि प्रणालियों को समानांतर कंप्यूटिंग में त्वरित करके क्रांति ला रहे हैं, विशेष रूप से 3D दृष्टि और स्वचालित ड्राइविंग में गहरी खोज के कार्यों के लिए अत्यधिक महत्वपूर्ण है। जीपीयू-ऑप्टिमाइज़ किए गए पाइपलाइन के साथ जुड़े कैमरे, जैसे NVIDIA जीपीयू में CUDA, सीपीयू से प्रोसेसिंग को बाहर ले जाते हैं, समर्थित कैमरों की संख्या को तीन गुना करने की संभावना है।
1.2 मेमोरी, स्टोरेज, और I/O
पर्याप्त RAM की आवश्यकता होती है कि वीडियो स्ट्रीम और प्रसंस्कित डेटा को बफ़र करने के लिए। 30 FPS पर 4K कैमरे लगभग 300 MB/s का अदबदल डेटा उत्पन्न करती है, जो कई कैमरों वाले सेटअप में मेमोरी की मांग को बढ़ाती है। उच्च-विपणन कैमरों के लिए, प्रत्येक कैमरे के लिए कम से कम 4–8 GB RAM आवंटित करें। NVMe SSDs जैसी उच्च-गति स्टोरेज और USB 3.2 और PCIe जैसी मजबूत I/O इंटरफ़ेसेस डेटा को इनगेस्ट करने और स्टोर करने के लिए आवश्यक हैं। पुरानी इंटरफ़ेसेस प्रणाली की स्केलिंग क्षमता को गंभीर रूप से सीमित कर सकती हैं।
2. औद्योगिक कैमरा विशिष्टांक
औद्योगिक कैमरा पैरामीटर्स होस्ट प्रणाली पर भार का सीधा प्रभाव डालते हैं, मुख्य रूप से निम्नलिखित दो महत्वपूर्ण कारकों के माध्यम से।
2.1 विपणन और फ़्रेम रेट
उच्च रिज़ॉल्यूशन और फ्रेम रेट का मतलब है प्रोसेस करने के लिए अधिक डेटा। एक 4K कैमरा 1080p कैमरा की तुलना में चार गुने पिक्सल्स उत्पन्न करता है, जो प्रोसेसिंग की मांग को महत्वपूर्ण रूप से बढ़ाता है। इसी तरह, 120 FPS कैमरा 30 FPS के कैमरे की तुलना में चार गुना अधिक डेटा उत्पन्न करता है। खेल प्रसारण में, उच्च रिज़ॉल्यूशन, उच्च-फ्रेम-रेट कैमरे इस्तेमाल किए जाते हैं, लेकिन यह मेजबान पर बहुत अधिक भार डालते हैं, जिससे गुणवत्ता की हानि से बचने के लिए शक्तिशाली हार्डवेयर की आवश्यकता होती है।
2.2 संपीड़न और इंटरफ़ेस
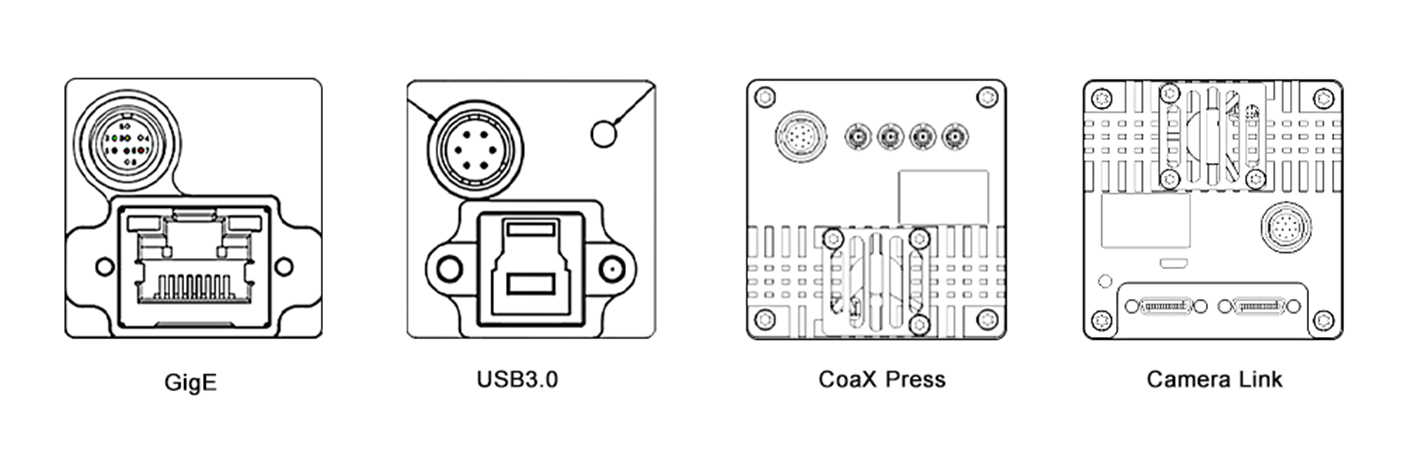
संपीड़न प्रारूप का चयन डेटा की मात्रा और प्रोसेसिंग की ओवरहेड पर प्रभाव डालता है। H.264 जैसे संपीड़ित प्रारूप बैंडविड्थ को कम करते हैं, लेकिन मेजबान पर डिकोडिंग की आवश्यकता होती है। असंपीड़ित प्रारूप अधिक वफादारता प्रदान करते हैं, लेकिन अधिक संसाधनों का उपयोग करते हैं। इसके अलावा, कैमरा इंटरफ़ेस का प्रकार महत्वपूर्ण है। GigE Vision और CoaXPress जैसे उच्च-गति इंटरफ़ेस कई कैमरों की स्थापना के लिए डेटा स्थानांतरण को कुशल बनाते हैं, जबकि USB 2.0 जैसे पुराने इंटरफ़ेस बैंडविड्थ की सीमितता के कारण पैमाने पर प्रभावित होते हैं।
3. सॉफ्टवेयर और प्रोसेसिंग पाइपलाइन
सॉफ्टवेयर की दक्षता समान रूप से महत्वपूर्ण है, इन दो क्षेत्रों को प्रणाली के प्रदर्शन के लिए मुख्य बनाया गया है।
3.1 ऑपरेटिंग सिस्टम और सॉफ्टवेयर टूल्स
ऑपरेटिंग सिस्टम और इसके ड्राइवर सॉफ्टवेयर की आधारशिला बनाते हैं। वास्तविक-समय ऑपरेटिंग सिस्टम (RTOS) लेटेंसी को कम करते हैं, रोबोटिक कंट्रोल जैसे अनुप्रयोगों के लिए आदर्श है। लिनक्स-आधारित प्रणाली खुले-उपस्थान के कारण लोकप्रिय हैं। ऑप्टिमाइज़ड ड्राइवर हार्डवेयर की दक्षता में वृद्धि करते हैं। विज़न सॉफ्टवेयर और लाइब्रेरीज, जैसे OpenCV, MATLAB, और TensorFlow और PyTorch जैसे गहन सीखने के फ्रेमवर्क, गणना की दक्षता में भिन्नता दिखाते हैं। उदाहरण के लिए, GPU-अभिप्रेरित YOLO मॉडल चलाने वाला होस्ट बुनियादी किनारे कشف का उपयोग करने वाले की तुलना में कम कैमरों का समर्थन कर सकता है, क्योंकि इसकी जटिलता अधिक है।

3.2 मल्टीथ्रेडिंग और ऑप्टिमाइज़ेशन
कुशल मल्टीथ्रेडिंग और समानांतरीकरण प्रणाली के प्रदर्शन को अधिकतम करने के लिए महत्वपूर्ण है। मल्टीथ्रेडिंग की सहायता से कार्य CPU कोरों पर साथ-साथ चल सकते हैं, जबकि समानांतरीकरण GPUs का उपयोग डेटा प्रोसेसिंग के लिए करता है। OpenMP और CUDA जैसी प्रौद्योगिकियाँ प्रायोजन के लिए फ़्रेमवर्क प्रदान करती हैं। एक मल्टी-कैमरा सुरक्षा प्रणाली में, OpenMP कैमरा फीड प्रोसेसिंग को CPU कोरों के बीच वितरित कर सकता है, और CUDA GPU पर छवि विश्लेषण को तेजी से करने में मदद कर सकता है, जिससे अधिक कैमरों का संभाल संभव होता है।
4. एप्लिकेशन आवश्यकताएँ
दृश्य कार्य की जटिलता संसाधन वितरण को निर्धारित करती है, जिसमें वास्तविक-समय और प्रोसेसिंग जटिलता मुख्य निर्धारक हैं।
4.1 वास्तविक-समय बनाम ऑफ़लाइन प्रोसेसिंग
वास्तविक-समय एप्लिकेशन, जैसे कि स्वचालित ड्राइविंग और औद्योगिक स्वचालन, तुरंत प्रोसेसिंग की मांग करते हैं जिससे कम लैटेंसी होती है, जिससे होस्ट के द्वारा समर्थित कैमरों की संख्या सीमित हो जाती है। ऑफ़लाइन प्रोसेसिंग, जैसे बैच वीडियो विश्लेषण, अधिक कैमरों को संभाल सकती है, लेकिन इसमें विलम्बित परिणाम होते हैं।
4.2 प्रोसेसिंग जटिलता
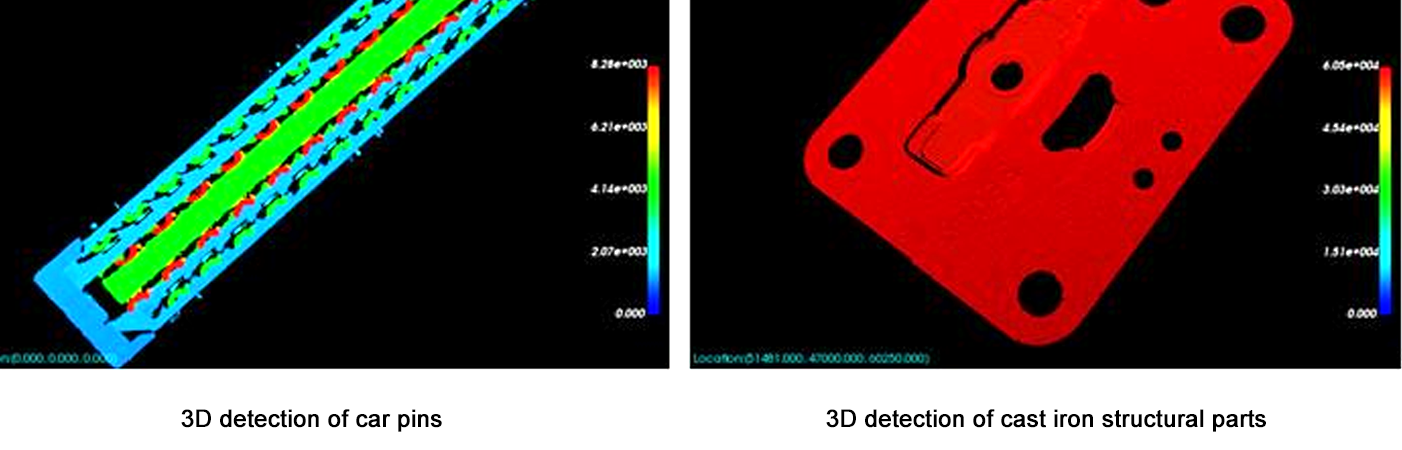
सरल कार्य जैसे मोशन डिटेक्शन कमप्यूटेशनल भार कम होता है, इससे एक होस्ट को अधिक कैमरों का समर्थन करने की अनुमति मिलती है। 3D रिकंस्ट्रक्शन या उन्नत चेहरे की पहचान जैसे जटिल कार्यों को विशाल संसाधनों की आवश्यकता होती है, जिससे समर्थित कैमरों की संख्या कम हो जाती है। उदाहरण के लिए, एक होस्ट मोशन डिटेक्शन के लिए 10 कैमरों का समर्थन कर सकता है, लेकिन वास्तविक समय में 3D गहराई का अनुमान लगाने के लिए केवल 3 कैमरों का समर्थन कर सकता है।
5. अनुमान ढांचा
कैमरा क्षमता का अनुमान लगाने के लिए निम्नलिखित चरणों का उपयोग करें:
कैमरा पैरामीटर्स की परिभाषा: परिणाम, फ़्रेम दर, संपीड़न, और इंटरफ़ेस।
डेटा थ्रूपुट की गणना करें: असंपीड़ित डेटा दर = परिणाम × फ़्रेम दर × बिट गहराई / 8 (उदाहरण के लिए, 1080p 30 FPS पर = 1920×1080×30×24 / 8 = ~1.4 GB/s).
हार्डवेयर सीमाओं का मूल्यांकन करें: सुनिश्चित करें कि CPU/GPU प्रोसेसिंग शक्ति ≥ कुल डेटा थ्रूपुट × प्रोसेसिंग ओवरहेड कारक (जटिल कार्यों के लिए 2–5×).
प्रोटोटाइप के साथ परीक्षण: बेंचमार्क टूल्स का उपयोग करें (जैसे, Intel VTune, NVIDIA Nsight) एकल कैमरे के लिए संसाधन उपयोग मापें, फिर रैखिक रूप से बढ़ाएं (समान्तरीकरण लाभ/हानि के लिए समायोजन करें।)
निष्कर्ष
एक होस्ट कितने कैमरों को विज़न सिस्टम में समर्थन कर सकता है, यह एक निश्चित संख्या नहीं है, बल्कि यह हार्डवेयर क्षमताओं, कैमरा विनिर्देशों, सॉफ्टवेयर ऑप्टिमाइज़ेशन और कार्य संकट के बीच एक संतुलन है। अधिकांश प्रणालियों के लिए, संसाधन उपयोग को निगरानी करते हुए एक प्रोटोटाइप से शुरू करना और धीरे-धीरे बढ़ाना सबसे विश्वसनीय दृष्टिकोण है। जैसे ही हार्डवेयर (जैसे, तेज ग्राफिक्स प्रोसेसिंग यूनिट, AI त्वरक) और सॉफ्टवेयर (जैसे, एज कंप्यूटिंग फ्रेमवर्क) तेजी से विकसित होता जाता है, अधिक कैमरों को समर्थन करने की क्षमता बढ़ती जाएगी और उच्च प्रदर्शन के साथ। यह विकास अधिक उन्नत और स्केलेबल विज़न समाधानों के विकास को सक्षम करेगा, जो विभिन्न उद्योगों में नई संभावनाओं को खोलेगा, स्वास्थ्य और परिवहन से लेकर सुरक्षा और मनोरंजन तक।
यह लेख प्रणाली के आर्किटेक्ट्स और इंजीनियर्स के लिए मूलभूत समझ प्रदान करता है, विशेष रूप से विशिष्ट अनुप्रयोग की मांगों को पूरा करने के लिए सटीक परीक्षण और अधिकृतिकरण की आवश्यकता पर बल देता है। सभी संबंधित कारकों को ध्यान में रखकर, ऐसे विज़न सिस्टम्स का डिज़ाइन करना संभव है जो दक्ष हों और समकालीन अनुप्रयोगों की बढ़ती मांगों का सामना करने में सक्षम हों।





