

मशीन विजन कंटूर डिटेक्शन
उद्योग 4.0 और स्मार्ट स्वचालन के युग में, मशीन विजन एक मुख्य प्रौद्योगिकी बन गई है, जो मशीनों को मानव क्षमता से अधिक सटीकता के साथ दृश्य डेटा देखने और व्याख्या करने की अनुमति देती है। इसके मुख्य कार्यों में से एक समोच्च का पता लगाना महत्वपूर्ण है: यह डिजिटल छवियों से वस्तु की सीमा आकृतियों को निकालती है, जो वस्तु पहचान, आयाम माप, दोष निरीक्षण और रोबोटिक मैनिपुलेशन जैसे कार्यों के लिए आधार बनती है।
1. कंटूर डिटेक्शन क्या है?
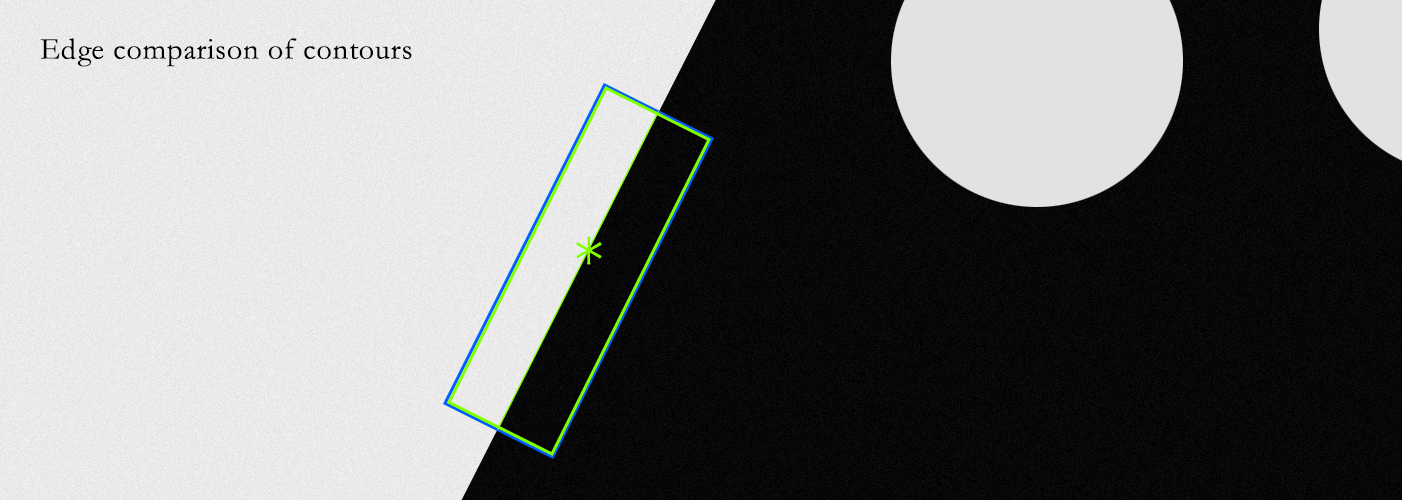
छवि प्रसंस्करण में "कंटूर" एक वक्र है जो समान तीव्रता या रंग वाले लगातार बिंदुओं (किसी वस्तु की सीमा के साथ) को जोड़ता है, जो वस्तु को उसकी पृष्ठभूमि से अलग करता है। असतत किनारों (पिक्सेल-स्तरीय प्रकाश-अंधेरे संक्रमण) के विपरीत, कंटूर लगातार लूप होते हैं (या आंशिक वस्तुओं के लिए खुले वक्र) जो वस्तु के आकार का प्रतिनिधित्व करते हैं, बस अकेले तीव्रता परिवर्तनों के नहीं।
आकृति का पता लगाने का मुख्य उद्देश्य छवि डेटा को सरल बनाना है: 2D छवि को 1D रेखा चित्र में बदलने से मशीनें किसी वस्तु की ज्यामिति (आकार, कोण, सममिति) का कुशलता से विश्लेषण कर सकती हैं, प्रत्येक पिक्सेल को संसाधित करने की आवश्यकता के बिना - वास्तविक समय के अनुप्रयोगों के लिए आवश्यक जहां गति और सटीकता दोनों मायने रखती है।
2. मूल सिद्धांत
आकृति का पता लगाने में दो मुख्य कदम शामिल हैं: पूर्वसंस्करण (वस्तु-पृष्ठभूमि के विपरीत बढ़ाना) और आकृति निष्कर्षण (सीमा बिंदुओं की पहचान करना)। ये कच्ची छवि की कमियों जैसे शोर, असमान प्रकाश, या कम विपरीतता को संबोधित करते हैं जो सीमाओं को धुंधला कर देते हैं।
2.1 पूर्वसंस्करण
कच्ची छवियों में लगभग कभी भी स्पष्ट सीमाएं नहीं होती हैं, इसलिए पूर्वसंस्करण आवश्यक है:
ग्रेस्केल परिवर्तन : अधिकांश एल्गोरिथ्म एकल-चैनल ग्रे-स्केल छवियों का उपयोग करते हैं (तीन आरजीबी चैनलों से डेटा को सरल बनाते हुए केवल एक में, क्योंकि रंग अक्सर अप्रासंगिक होता है)।
शोर रेडक्शन : गॉसियन ब्लरिंग गॉसियन कर्नल के साथ छवियों को सुचारु करता है, उच्च-आवृत्ति शोर को कम करते हुए जबकि प्रमुख तीव्रता परिवर्तनों को बनाए रखता है—सेंसर हस्तक्षेप या प्रकाश उतार-चढ़ाव से गलत किनारों से बचने के लिए महत्वपूर्ण है।
किनारा का पता लगाना : किनारों (कॉन्टूर) का निर्माण करने वाले पिक्सेल-स्तरीय तीव्रता परिवर्तनों की पहचान करता है। कैनी एज डिटेक्टर (एक बहु-चरणीय विधि: सुचारुकरण, ढाल गणना, गैर-अधिकतम दमन, हिस्टेरेसिस थ्रेशोल्डिंग) स्वर्ण मानक है, पतली, निरंतर किनारों का उत्पादन करता है। सोबेल ऑपरेटर, जो क्षैतिज/ऊर्ध्वाधर किनारों को रेखांकित करता है, मोटी सीमाओं के लिए काम करता है।
थ्रेशोल्डिंग : ग्रे-स्केल एज मैप को द्विआधारी (काला/सफेद) छवियों में परिवर्तित करता है, अग्रभूमि (वस्तु किनारे) को 1 और पृष्ठभूमि को 0 के रूप में—सरल कॉन्टूर ट्रेसिंग के लिए।
2.2 कॉन्टूर एक्सट्रैक्शन
प्रीप्रोसेसिंग के बाद, एल्गोरिथ्म कॉन्टूर बनाने के लिए जुड़े हुए अग्रभूमि पिक्सेल्स का ट्रेस करते हैं। फ्रीमैन चेन कोड का व्यापक रूप से उपयोग किया जाता है: यह पिछले पिक्सेल के सापेक्ष दिशा कोड (ऊपर, नीचे, बाएं, दाएं) के रूप में रूपरेखाओं का प्रतिनिधित्व करता है, जिससे भंडारण कम हो जाता है और आकार की तुलना आसान हो जाती है। OpenCV जैसे पुस्तकालय इसे सरल बनाते हैं, जो findContours() जैसे कार्यों के साथ रूपरेखा पिक्सेल निर्देशांक लौटाते हैं और फ़िल्टरिंग (क्षेत्र या आकार अनुपात द्वारा) की अनुमति देते हैं ताकि शोर को हटाया जा सके।

3. उन्नत तकनीकें
पारंपरिक विधियां नियंत्रित, उच्च-कॉन्ट्रास्ट वाले वातावरण के लिए काम करती हैं, लेकिन वास्तविक दुनिया की स्थितियों (असमान प्रकाश, ओवरलैपिंग वस्तुओं) में उन्नत दृष्टिकोण की आवश्यकता होती है:
अनुकूली थ्रेशोल्डिंग : प्रत्येक पिक्सेल के लिए स्थानीय थ्रेशोल्ड की गणना करता है (एक एकल वैश्विक थ्रेशोल्ड के विपरीत), भिन्न प्रकाश वाली छवियों (उदाहरण के लिए, कारखाने की रोशनी के तहत औद्योगिक भागों) के लिए आदर्श।
डीप लर्निंग-आधारित डिटेक्शन : कॉन्वोल्यूशनल न्यूरल नेटवर्क (CNN) सीधे कच्ची छवियों से सीमाओं को निकालते हैं, मैनुअल प्रीप्रोसेसिंग को छोड़कर। मॉडल जैसे HED (होलिस्टिकली-नेस्टेड एज डिटेक्टर) और RCF (रिचर कॉन्वोल्यूशनल फीचर्स) उच्च-रिज़ॉल्यूशन एज मैप्स के लिए मल्टी-स्केल CNN फीचर्स को फ्यूज करें, जटिल दृश्यों (मेडिकल इमेज, अव्यवस्थित वातावरण) में उत्कृष्ट प्रदर्शन करते हैं।
4. प्रमुख चुनौतियाँ
प्रगति के बावजूद, वास्तविक दुनिया की बाधाएँ बनी रहती हैं:
शोर और प्रकाश फैक्ट्री फर्श, कम प्रकाश, या बाहरी स्थान टूटे हुए/गलत कॉन्टूर का कारण बनते हैं।
ओवरलैपिंग/ओक्लूडेड ऑब्जेक्ट्स ढेर के भाग मिलकर कॉन्टूर, व्यक्तिगत आकारों को अलग करना मुश्किल बनाते हैं।
पारदर्शी/परावर्तक सामग्री कांच या धातु प्रकाश को फैलाता है, कमजोर/विकृत किनारों का निर्माण करता है।
वास्तविक समय प्रदर्शन औद्योगिक कार्य (असेंबली लाइन निरीक्षण) को प्रति सेकंड 30+ फ्रेम (FPS) की आवश्यकता होती है। गहरी सीखने के मॉडल को गति की मांगों को पूरा करने के लिए अनुकूलित (मात्रात्मक, GPU त्वरण) करने की आवश्यकता होती है।
5. वास्तविक दुनिया के अनुप्रयोग
कॉन्टूर डिटेक्शन उद्योगों में स्वचालन को बढ़ावा देता है:
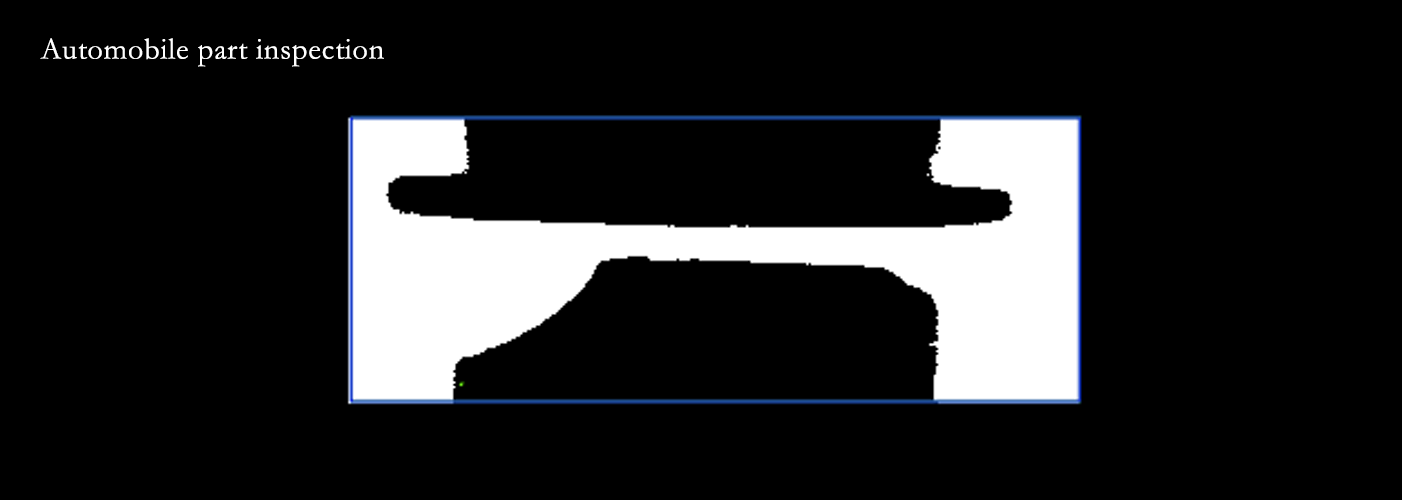
औद्योगिक गुणवत्ता निरीक्षण : निर्माण में दोषों (दरारें, दबाव) की जांच करता है। उदाहरण के लिए, ऑटोमोटिव उत्पादन डिज़ाइन कॉन्टूर के साथ इंजन घटकों (गियर, गैस्केट) के मिलान की पुष्टि करता है, टॉलरेंस से बाहर के भागों को अस्वीकार करता है।
रोबोटिक पिक-एंड-प्लेस : रोबोट्स को वस्तुओं का पता लगाने में मदद करता है। गोदामों में, रोबोटिक बाहों कॉन्टूर का उपयोग करके कन्वेयर पर पैकेज का पता लगाते हैं, केंद्र/दिशा की गणना करते हैं, और पकड़ को समायोजित करते हैं।
चिकित्सा चित्रांकन : आकार विज्ञान संरचनाओं (सीटी स्कैन में ट्यूमर, ऊतक स्लाइड्स में कोशिका सीमाओं) को विभाजित करके निदान में सहायता करता है। डीप लर्निंग मॉडल परिवर्तनीय जैविक ऊतकों को अच्छी तरह से संभालते हैं।
कृषि : कॉन्टूर विश्लेषण के माध्यम से फलों (सेब, संतरे) को आकार/पकाव के आधार पर वर्गीकृत करता है और पत्ती कॉन्टूर परिवर्तनों से फसल बीमारियों का पता लगाता है।
यातायात निगरानी : वाहनों की निगरानी करता है, प्रवाह को मापता है या दुर्घटनाओं की पहचान करता (असामान्य कॉन्टूर या स्थिर वस्तुओं के माध्यम से) सीसीटीवी कैमरों का उपयोग करके।
6. भावी प्रवृत्तियां
तीन प्रवृत्तियाँ किनारा का पता लगाने को आकार देने वाली हैं:
एज एआई एकीकरण : एज उपकरणों (औद्योगिक कैमरों, ड्रोन) पर हल्के मॉडल (क्वांटाइज्ड CNNs) क्लाउड पर निर्भरता के बिना वास्तविक समय में प्रसंस्करण की अनुमति देते हैं - स्वायत्त रोबोट के लिए महत्वपूर्ण है।
मल्टी-मॉडल फ्यूजन : लिडार/थर्मल इमेजिंग के साथ दृश्य डेटा को जोड़ने से कठिन परिस्थितियों में पता लगाने में सुधार होता है (उदाहरण के लिए, थर्मल इमेजिंग कम प्रकाश में सीमाओं को बढ़ाती है; लिडार ओवरलैपिंग वस्तुओं के लिए 3डी गहराई जोड़ता है।)
स्पष्टीकरण योग्य एआई (एक्सएआई) : एक्सएआई तकनीक स्पष्ट करेगी कि डीप लर्निंग मॉडल कैसे किनारों का पता लगाते हैं, महत्वपूर्ण क्षेत्रों (चिकित्सा निदान, एयरोस्पेस निरीक्षण) में विश्वास बनाते हुए।
निष्कर्ष
मशीन दृष्टि किनारा का पता लगाने से कच्चे छवि डेटा को उपयोगी अंतर्दृष्टि से जोड़ता है, स्वचालन और गुणवत्ता नियंत्रण को सक्षम करता है। पारंपरिक किनारा का पता लगाने से लेकर डीप लर्निंग तक, यह जटिल चुनौतियों से निपटने के लिए विकसित हुआ है। प्रौद्योगिकी के आगे बढ़ने के साथ, यह स्मार्ट सिस्टम में केंद्रीय भूमिका निभाता रहेगा, उद्योगों में मशीनों को अधिक सक्षम और विश्वसनीय बनाते हुए।





