

मशीन विजन के लिए उच्च सटीकता वाले आयाम निरीक्षण को प्राप्त करना क्यों मुश्किल है?
औद्योगिक स्वचालन और गुणवत्ता नियंत्रण के तेजी से विकसित परिदृश्य में, मशीन विजन विभिन्न निरीक्षण कार्यों के लिए एक शक्तिशाली उपकरण के रूप में उभरा है। हालांकि, इसके अनेक लाभों के बावजूद उच्च परिशुद्धता वाले आयाम निरीक्षण को प्राप्त करना एक महत्वपूर्ण चुनौती बनी हुई है। इस लेख में मशीन विजन के द्वारा सटीक आयामी माप प्राप्त करने में कठिनाई के पीछे मुख्य कारणों पर गहराई से चर्चा की गई है।
हार्डवेयर - संबंधित बाधाएं
मशीन विजन प्रणाली के हार्डवेयर घटक, जिसमें कैमरे और लेंस शामिल हैं, सटीकता पर अंतर्निहित सीमाएं लगाते हैं। कम रिज़ॉल्यूशन वाले कैमरे वस्तुओं के बारीक विवरणों को कैप्चर करने में असमर्थ होते हैं, जिससे आयाम की गणना गलत होती है। उच्च संकल्प वाले कैमरों में भी पिक्सेल का आकार एक महत्वपूर्ण कारक है। छोटे पिक्सेल सैद्धांतिक रूप से अधिक विस्तृत चित्र प्रदान कर सकते हैं, लेकिन वे प्रति पिक्सेल कैप्चर की गई प्रकाश की मात्रा को भी कम करते हैं, जिससे छवि शोर बढ़ता है। यह शोर वस्तुओं के किनारों को विकृत कर सकता है, जिससे उनकी सीमाओं को ठीक से परिभाषित करना मुश्किल हो जाता है।
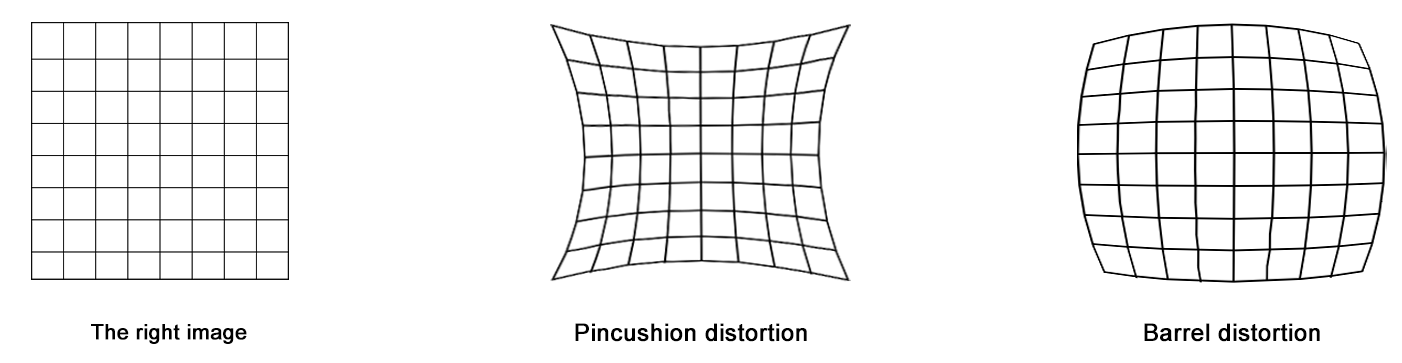
औद्योगिक लेंस मशीन विजन की सटीकता में भी महत्वपूर्ण भूमिका निभाते हैं। लेंस में ज्यामितीय विकृतियाँ, जैसे बैरल और पिन कुशन विकृतियाँ आम हैं। ये विकृतियाँ वास्तविक दुनिया में सीधी रेखाओं को कैप्चर की गई छवियों में घुमावदार दिखाई देती हैं, जो आयाम माप की सटीकता को काफी प्रभावित कर सकती हैं। इसके अतिरिक्त, लेंस क्रोमैटिक अपूर्णता से पीड़ित हो सकते हैं, जहां प्रकाश की विभिन्न तरंग दैर्ध्य विभिन्न बिंदुओं पर केंद्रित होती है, जिसके परिणामस्वरूप वस्तुओं के चारों ओर रंग की सीमाएं होती हैं और माप की सटीकता और अधिक खराब होती है। इन लेंस दोषों को ठीक करने के लिए जटिल कैलिब्रेशन प्रक्रियाओं की आवश्यकता होती है, और पूरे दृश्य क्षेत्र में सही सुधार प्राप्त करना बेहद मुश्किल है।
ऑप्टिक्स की भौतिक सीमाएँ
ऑप्टिक्स के भौतिक सिद्धांत मशीन विजन में उच्च परिशुद्धता आयाम निरीक्षण के लिए मौलिक बाधाएं प्रस्तुत करते हैं। प्रकाश विवर्तन एक प्रमुख मुद्दा है। प्रकाश विज्ञान के नियमों के अनुसार, जब प्रकाश छोटे छेदों से होकर गुजरता है या छोटी वस्तुओं के आसपास होता है, तो यह विवर्तन करता है, जिससे वस्तु की छवि के किनारे धुंधले हो जाते हैं। छोटे घटकों की जांच के मामले में यह विवर्तन प्रभाव निकट-अंतर वाली विशेषताओं के बीच सटीक रूप से भेद करना असंभव बना सकता है, जिससे आयाम माप में त्रुटियां हो सकती हैं।
एक और ऑप्टिकल सीमा क्षेत्र की सीमित गहराई है। मशीन विजन में यदि वस्तु के जटिल तीन आयामी आकार हैं या यदि कैमरे के सापेक्ष वस्तु की स्थिति में भिन्नताएं हैं, तो वस्तु के कुछ भाग फोकस से बाहर हो सकते हैं। इस तरह की धुंधली दृष्टि वस्तु की उपस्थिति को विकृत कर सकती है, जिससे सटीक माप करना मुश्किल हो जाता है। क्षेत्र की गहराई को समायोजित करने में अक्सर व्यापार-बदलाव शामिल होते हैं; क्षेत्र की गहराई को बढ़ाते हुए संकल्प कम हो सकता है, जबकि संकल्प को बढ़ाते हुए क्षेत्र की गहराई को संकुचित कर सकता है।

पर्यावरणीय हस्तक्षेप
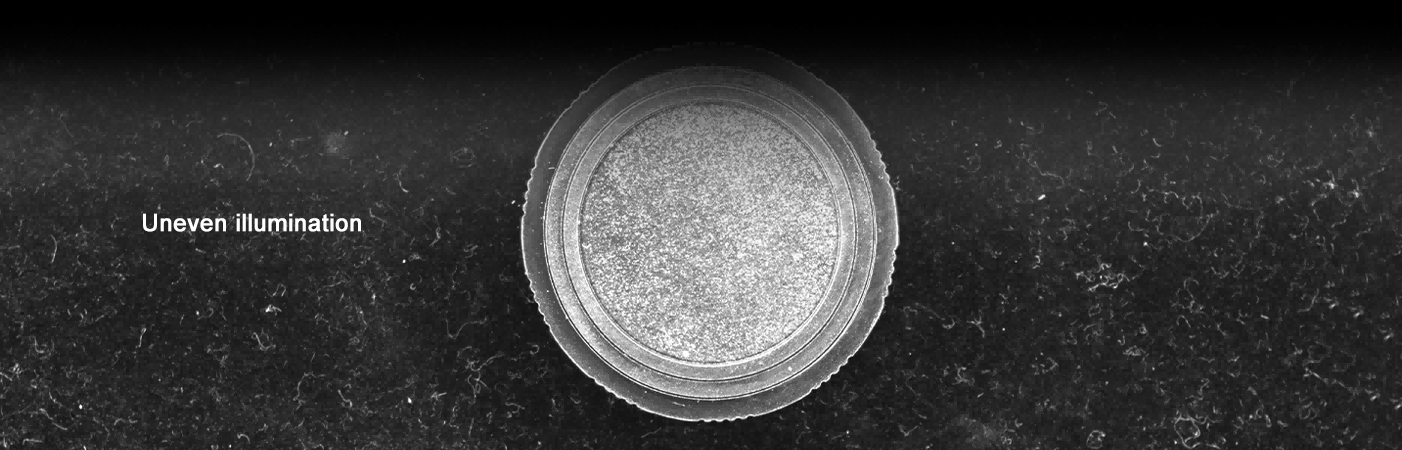
जिस वातावरण में मशीन विजन सिस्टम काम करते हैं, उसका आयाम निरीक्षण की सटीकता पर गहरा प्रभाव पड़ सकता है। प्रकाश की स्थिति बहुत भिन्न और महत्वपूर्ण है। प्रकाश की तीव्रता, दिशा और रंग तापमान में परिवर्तन से चित्रों में वस्तुओं की उपस्थिति बदल सकती है। उदाहरण के लिए, असमान प्रकाश वस्तु पर छाया पैदा कर सकता है, जिसे वस्तु के आकार के हिस्से के रूप में गलत समझा जा सकता है, जिससे गलत आयाम गणना होती है। वस्तु पर परावर्तक सतहें भी चमक का कारण बन सकती हैं, जो कैमरा सेंसर को संतृप्त कर सकती हैं और महत्वपूर्ण सुविधाओं को अस्पष्ट कर सकती हैं।
परिवेश का तापमान और आर्द्रता भी मशीन विजन प्रणालियों के प्रदर्शन को प्रभावित कर सकती है। तापमान परिवर्तन से निरीक्षण की जा रही वस्तु और दृष्टि प्रणाली के हार्डवेयर घटकों दोनों का थर्मल विस्तार या संकुचन हो सकता है, जिससे आयामी परिवर्तन हो सकते हैं। आर्द्रता लेंस या अन्य ऑप्टिकल घटकों पर संघनक का कारण बन सकती है, जिससे छवि की गुणवत्ता और माप की सटीकता में गिरावट आ सकती है।
वस्तुओं की समतलता - चुनौती
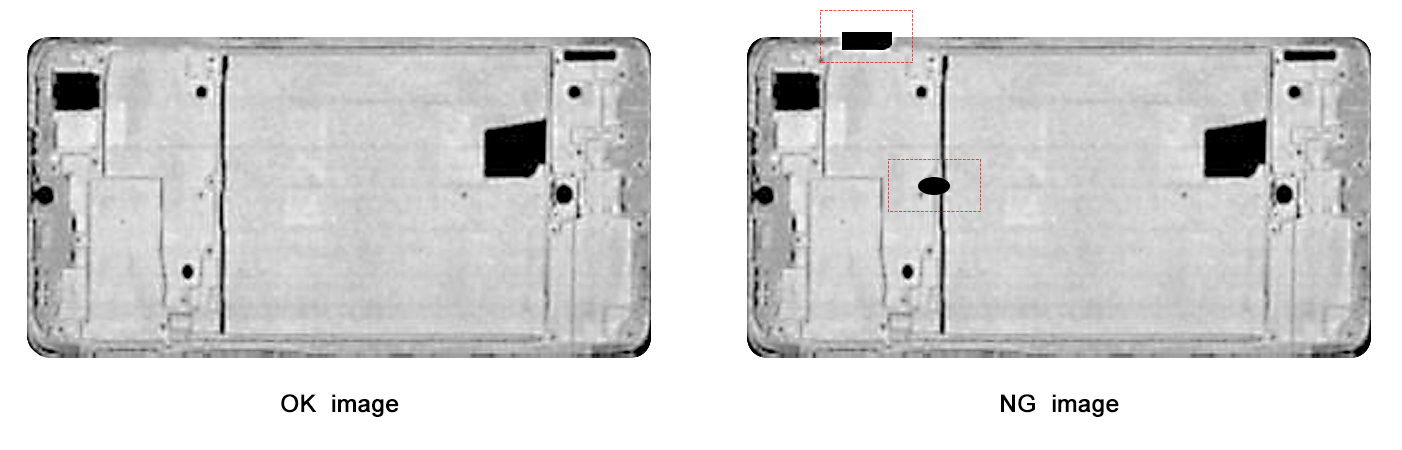
किसी वस्तु की समतलता एक ऐसा महत्वपूर्ण कारक है जिसे अक्सर अनदेखा किया जाता है जो मशीन विजन आधारित आयाम निरीक्षण की सटीकता में बाधा डालता है। जब किसी वस्तु की सतह असमान होती है, तो प्रकाश और वस्तु के बीच की बातचीत अप्रत्याशित हो जाती है। ढलानों या ढलानों वाले क्षेत्रों में प्रकाश प्रतिबिंब अपेक्षित पैटर्न से विचलित होता है। कैमरे की ओर प्रकाश को एक समान दिशा में प्रतिबिंबित करने के बजाय, असमान सतहें प्रकाश को बिखेरती हैं, जो उज्ज्वल धब्बे और छायाएं पैदा करती हैं जो वस्तु की वास्तविक ज्यामिति से मेल नहीं खाती हैं। ये असंगत प्रकाश पैटर्न किनारे-अनुभूति एल्गोरिदम को गुमराह कर सकते हैं, जिससे वे वस्तु की सीमाओं की गलत पहचान कर सकते हैं। उदाहरण के लिए, एक समतल सतह पर एक छोटा सा उछाल एक विशिष्ट विशेषता के लिए गलत हो सकता है, जिसके परिणामस्वरूप फुलाया आयाम माप होता है।
इसके अतिरिक्त, 3 डी मशीन विजन प्रणालियों में जो संरचित प्रकाश प्रक्षेपण या स्टीरियो मिलान जैसी तकनीकों पर निर्भर करती हैं, एक असमान सतह गहराई की धारणा की मौलिक प्रक्रियाओं को बाधित करती है। संरचित प्रकाश के साथ, अनियमित सतह पर प्रक्षेपित पैटर्न विकृत हो जाते हैं, जिससे गहराई की जानकारी को सटीक रूप से डिकोड करना चुनौतीपूर्ण हो जाता है। स्टीरियो दृष्टि में, सतह की समतलता में भिन्नताएं दो कैमरा दृश्यों के बीच संबंधित बिंदुओं को मिलाने में त्रुटियों का कारण बन सकती हैं, क्योंकि अनियमितताएं असमानताएं पैदा करती हैं जो वास्तविक दूरी को प्रतिबिंबित नहीं करती हैं। नतीजतन, वस्तु के 3 डी आकार का उच्च परिशुद्धता के साथ पुनर्निर्माण एक कठिन कार्य बन जाता है, जो आयाम निरीक्षण की सटीकता को सीधे प्रभावित करता है।
एल्गोरिथम और सॉफ्टवेयर की सीमाएँ
आयाम निरीक्षण के लिए मशीन विजन में प्रयुक्त एल्गोरिदम और सॉफ्टवेयर की अपनी चुनौतियां हैं। किनारे का पता लगाना, वस्तु के आयामों को निर्धारित करने में एक मौलिक कदम, अक्सर जटिल और त्रुटि-प्रवण होता है। कैननी, सोबेल या लैप्लाशियन जैसे अलग-अलग किनारे का पता लगाने वाले एल्गोरिदम की अपनी ताकत और कमजोरियां होती हैं। चित्र में शोर के कारण झूठे किनारे का पता लग सकता है, जबकि कम कंट्रास्ट वाली वस्तुओं के कारण किनारे चूक सकते हैं।
इसके अतिरिक्त आयामों की गणना के लिए पता लगाए गए किनारों पर ज्यामितीय मॉडल को सही ढंग से फिट करना एक कठिन कार्य है। वस्तुओं के अनियमित आकार, सतह दोष या बनावट में भिन्नता हो सकती है, जो एल्गोरिदम को भ्रमित कर सकती है। इसके अतिरिक्त, जटिल त्रि-आयामी ज्यामिति वाली वस्तुओं को संभालने के लिए उन्नत 3 डी पुनर्निर्माण एल्गोरिदम की आवश्यकता होती है, जो कम्प्यूटेशनल रूप से महंगे होते हैं और अक्सर आवश्यक सटीकता की कमी होती है।
निष्कर्ष में, मशीन विजन के साथ उच्च परिशुद्धता आयाम निरीक्षण प्राप्त करने की कठिनाई हार्डवेयर की सीमाओं, ऑप्टिकल बाधाओं, पर्यावरण हस्तक्षेप, वस्तु समतलता से संबंधित मुद्दों और एल्गोरिथम और सॉफ्टवेयर चुनौतियों के संयोजन से उत्पन्न होती है। इन बाधाओं को दूर करने के लिए ऑप्टिक्स, इलेक्ट्रॉनिक्स, कंप्यूटर विज्ञान और सामग्री विज्ञान सहित कई क्षेत्रों में निरंतर अनुसंधान और विकास की आवश्यकता होती है। इन मुद्दों को संबोधित करके हम आयाम निरीक्षण के लिए मशीन विजन प्रणालियों की सटीकता और विश्वसनीयता में सुधार कर सकते हैं, जिससे वे आधुनिक औद्योगिक अनुप्रयोगों की तेजी से सख्त आवश्यकताओं को पूरा कर सकें।





