

Panel szintű kamerák útmutatója beágyazott látási rendszerekhez
A gyártók (OEM-ek), rendszerintegrátorok és beágyazott látási rendszereket fejlesztő mérnöki csapatok számára a táblaszintű kamera a kompakt, megbízható és nagy teljesítményű beágyazott látási rendszerek alapvető építőeleme. Ez az átfogó útmutató részletesen ismerteti a táblaszintű kamerák kritikus kiválasztási szempontjait, interfészprotokolljait, szoftvereszközök-környezetének követelményeit, valamint a fizikai integráció legjobb gyakorlatait, hogy mérnöki csapatának segítséget nyújtson a beágyazott látási rendszerek ipari, orvosi, autóipari és okos infrastruktúra-alkalmazásokhoz történő optimalizálásában.
A táblaszintű kamerák kiválasztásának kulcsfontosságú szempontjai
A szenzor teljesítményének és az energiafelvétel, valamint a hőkezelés korlátozásainak egyensúlyozása
Kiválasztás táblaszintű kamerák szükség van a szenzorok képességeinek optimalizálására az energiafelhasználási keret és a hőmérsékleti korlátok figyelembevételével. A nagy felbontású szenzorok (pl. 12 MP felett) 30–50%-kal több energiát fogyasztanak, mint a 2–5 MP-os megfelelőik, és hőt termelnek, amely csökkenti a megbízhatóságot a ventilátor nélküli kialakításokban. Az ipari látási rendszerek, amelyeket szűk helyeken telepítenek, leginkább az alacsony zajszintű, 1 W-nál kevesebb fogyasztású szenzorokból profitálnak, miközben fenntartják a 40 dB-nél nagyobb jel-zaj arányt (SNR). A mérnököknek infravörös képalkotással kell ellenőrizniük a hőteljesítményt a prototípusozás során – a 85 °C feletti folyamatos hőmérséklet a szenzorok degradációját négyszeresére gyorsítja (Embedded Systems Journal, 2023).

A felbontás, a képkockasebesség és a dinamikatartomány összehangolása az alkalmazási igényekkel
A kamerák műszaki specifikációinak pontos illesztése az üzemeltetési követelményekhez megakadályozza a túltervezést és a költségek növekedését. Fontolja meg az alábbi kritikus párosításokat:
| Alkalmazás | Optimális specifikációk | Indoklás |
|---|---|---|
| Robotikai pick-and-place (fogás és elhelyezés) | 5 MP @ 60 fps, 120 dB dinamikatartomány | Kiegyensúlyozza a részfelismerés sebességét a világítási viszonyok változékonyságával a raktárakban |
| Orvosi endoszkópia | 1080p @ 30 fps, 75 dB-nél nagyobb dinamikatartomány | Minimális mozgásmosódást biztosít alacsony fényviszonyok mellett a zárt terekben, miközben csökkenti az adatsávszélességet |
| Közlekedésfigyelés | 4K @ 24 fps, WDR (140 dB) | Rendszámok rögzítése hajnalban/alkonykor mozgásmentes képekkel |
A magas dinamikatartományú (HDR) üzemmódok elengedhetetlenek olyan környezetekben, ahol a megvilágítás ingadozik, bár ez 15–20 ms-os feldolgozási késleltetést eredményez. A képkockasebesség kiválasztásánál figyelembe kell venni a mozgó tárgy sebességét: például 2 m/s sebességű szállítószalag ellenőrzéséhez legalább 120 fps szükséges ahhoz, hogy a mozgáselmosódás 0,5 képpontnál kevesebb legyen.
Interfészprotokollok megbízható lapkaszintű kamerák integrálásához
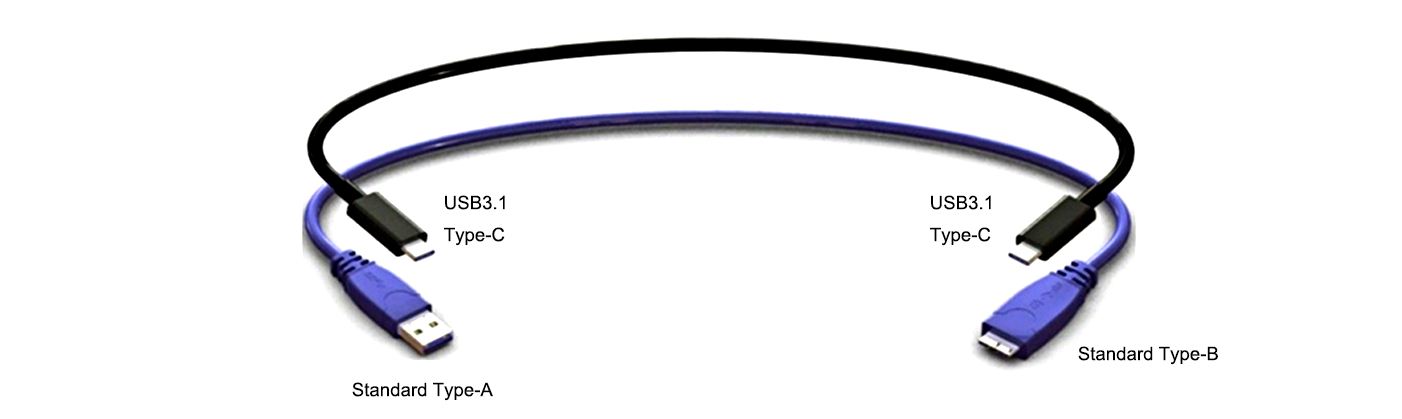
USB 3.1, MIPI CSI-2 és LVDS: sávszélesség, késleltetés és gyakorlati alkalmazhatóság
A táblaszintű kamerához optimális interfészprotokoll kiválasztása a sávszélesség, a késleltetés és a környezeti korlátozások közötti egyensúlyozást igényli. Az USB 3.1 5 Gbps-os átviteli sebességet kínál, valamint egyszerű csatlakozás-és-működés funkciót – ez ideális orvosi képalkotó rendszerekhez vagy kioszkokhoz, ahol a kábelhossz 3 méter alatt marad. A MIPI CSI-2 skálázható sávszélességet (legfeljebb 6 Gbps négy csatornán keresztül) és extrém alacsony fogyasztást biztosít, így a de facto szabvány mobil- és beágyazott, ARM-alapú rendszerekben. Az LVDS kiváló zajimmunitást nyújt elektromosan zajos környezetekben, például gyártóautomatizálásban, bár az 1 Gbps alatti sávszélessége korlátozza a nagy felbontású alkalmazásokat. Valós idejű robotikai rendszerek esetén a MIPI CSI-2 kevesebb mint 5 ms-os késleltetése felülmúlja az USB 3.1 10–20 ms-os tartományát. A protokollokat a telepítési igények alapján érdemes rangsorolni: az USB 3.1 gyors prototípusfejlesztésre, a MIPI energiahatékony peremkészülékekhez, az LVDS ipari gépekhez.
Szoftverökoszisztéma és SDK-támogatás táblaszintű kamerákhoz
Keresztplatformos SDK-k (Spinnaker, Aravis) és ARM/x86 RTOS-kompatibilitás
A látási rendszerek gyors üzembe helyezéséhez elengedhetetlenek a robusztus szoftverfejlesztő készletek (SDK-k). A többplatformos megoldások, például a Spinnaker és az Aravis szabványosított felületeket biztosítanak, amelyek elrejtik a hardveres bonyodalmakat, és lehetővé teszik a kód hordozhatóságát a fejlesztési és a gyártási környezetek között. A Spinnaker különféle architektúrákat támogat – ideértve az x86-ot, az ARM-et és a valós idejű operációs rendszereket (RTOS) – egységes API-kon keresztül, így a mérnökök asztali gépeken prototípust készíthetnek, és zavartalanul telepíthetik beágyazott célként. Ugyanakkor az open-source keretrendszerek, mint az Aravis, gyártófüggetlen GenICam-megfelelőséget kínálnak Linux-alapú rendszerekhez. Ez az architekturális rugalmasság a beágyazott látástechnológia alkalmazásának tanulmányai szerint (2023) 40%-kal csökkenti az integrációs akadályokat. Kulcsfontosságú szempontok közé tartozik az RTOS-kompatibilitás a determinisztikus késleltetés érdekében ipari vezérlési feladatokban, a többarchitektúrás támogatás a jövőbeli hardveráttelepítésekkel szembeni jövőbiztonság érdekében, valamint az absztrakciós rétegek, amelyek leegyszerűsítik a meghajtóprogram-fejlesztést. A könnyű RTOS-környezetekkel való kompatibilitás megbízható működést biztosít erőforrás-korlátozott alkalmazásokban, például autonóm mobil robotokban vagy orvosi eszközökben, ahol a folyamatos működés feltétlenül szükséges.
Fizikai integráció: alakforma, lencsefoglalat és környezeti ellenállás
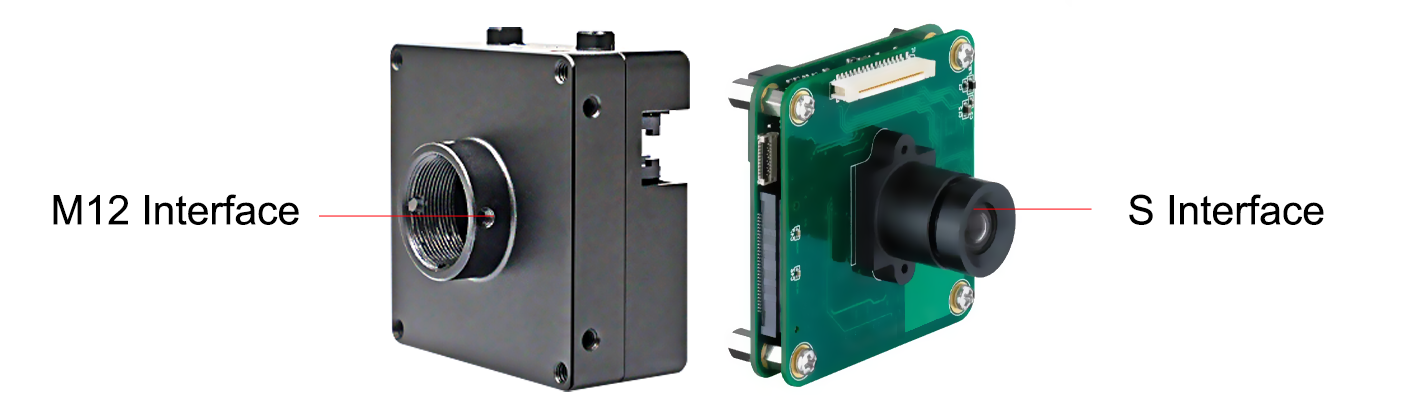
M12, S-Mount és egyedi interfészek – látómező és optikai rugalmasság
A lencsefoglalatok közvetlenül befolyásolják az optikai teljesítményt az beépített látási rendszerekben. A szabványos M12 foglalatok költséghatékony látómező (FOV) beállítást biztosítanak ipari alkalmazásokhoz, míg az S-Mount kompakt megoldásokat kínál térkorlátozott tervekhez. Az egyedi interfészek lehetővé teszik speciális látómező-igények kielégítését, például ultra-széles szögek vagy telecentrikus konfigurációk esetén. Fontos optikai tényezők:
- A torzulás ellenállása : <0,1 %-os hordótorzítás fenntartja a mérési pontosságot a metrológiában
- Gépi Stabilitás : Zárómechanizmusok megakadályozzák a fókuszeltolódást 15 G rezgés hatására
- NIR-érzékenység : A 850 nm-es hullámhossz-támogatás javítja a gyenge fényviszonyokban nyújtott teljesítményt
- Környezeti ellenállóság : Az IP67 minősítésű tömítések védik a részecskék behatolása ellen
Hőkezelés és EMC-megfelelőség hűtőventilátor nélküli, burkolat nélküli üzemelés esetén
A hőkezelés kritikussá válik, amikor fánk nélküli környezetben, 60 °C feletti hőmérsékleten üzemeltetnek lapkaszintű kamerákat. Hatékony stratégiák például az 5 W-nál nagyobb hőterhelés elvezetésére képes réz hőelosztók, a szenzor integritását –40 °C és 85 °C közötti hőmérséklettartományban megőrző, hőálló interfészanyagok, valamint a hőt termelő alkatrészeket a képszenzoroktól elkülönítő nyomtatott áramkör (PCB) elrendezés optimalizálása. Az elektromágneses összeférhetőség (EMC) biztosítja a megbízható működést az elektromosan zajos ipari környezetekben. A megfelelés érdekében szükséges a kulcsfontosságú szabványok betartása:
| Követelménye | Szabványos | Kritikus alkalmazás |
|---|---|---|
| Sugárzott emissziók | FCC 15. rész, B osztály | Orvosi diagnosztika |
| Immunitást | IEC 61000-4-3 | Autógyártás |
| ESD Védelem | IEC 61000-4-2 | Élelmiszer-feldolgozás |
Megfelelő földelés és páncélozott burkolatok 40%-kal csökkentik az interferencia kockázatát a burkolat nélküli telepítések esetében (EMC Journal, 2023).
Készen áll arra, hogy optimalizálja beágyazott látási rendszerét egy testre szabott lapkaszintű kamerával?
A táblaszintű kamera a megbízható, kompakt és nagy teljesítményű beágyazott látási rendszerek központi eleme – egyetlen készülék sem tudja felülmúlni az OEM által testre szabott táblaszintű kameratervezés testreszabhatóságát, energiahatékonyságát és integrációs rugalmasságát. Ha a szenzor teljesítményét, az interfészprotokollokat, a szoftvertámogatást és a fizikai formátumot egyedi alkalmazási igényeihez igazítja, gyorsabb piacra jutáshoz, alacsonyabb anyagköltséghez (BOM) és folyamatosan magas megbízhatósághoz juthat el még a legigényesebb beágyazott környezetekben is.

Ipari minőségű, alaplap szintű kameramegoldásokhoz, amelyeket OEM beágyazott látási alkalmazásához igazítottak, vagy teljesen integrált látási rendszer építéséhez kiegészítő objektívekkel, megvilágítással és peremfeldolgozó eszközökkel (amelyeket a HIFLY kínál), válasszon olyan partnert, amely gyökerei az ipari géplátásban és az OEM testreszabási szakérzetben nyúlnak vissza. A HIFLY 15 éves tapasztalata lefedi az alaplap szintű kameratervezést, teljes OEM/ODM testreszabott gyártást és végponttól végpontig tartó beágyazott látási rendszerintegrációt – mindezt az ISO 9001:2015 tanúsítvánnyal, globális szabályozási megfelelőségi támogatással és dedikált tervezésbe való bekapcsolódási mérnöki szolgáltatásokkal alátámasztva. Lépjen kapcsolatba velünk még ma kötelezettségmentes konzultációért, testreszabott prototípus-készítésért vagy egy, beágyazott látási projektjéhez optimalizált alaplap szintű kamera tervezéséért.





