

Tippek a megfelelő vonalszkenner kamera kiválasztásához
Soros szkennerkamerák alapjai: architektúra, működési elv és kulcsfontosságú előnyök
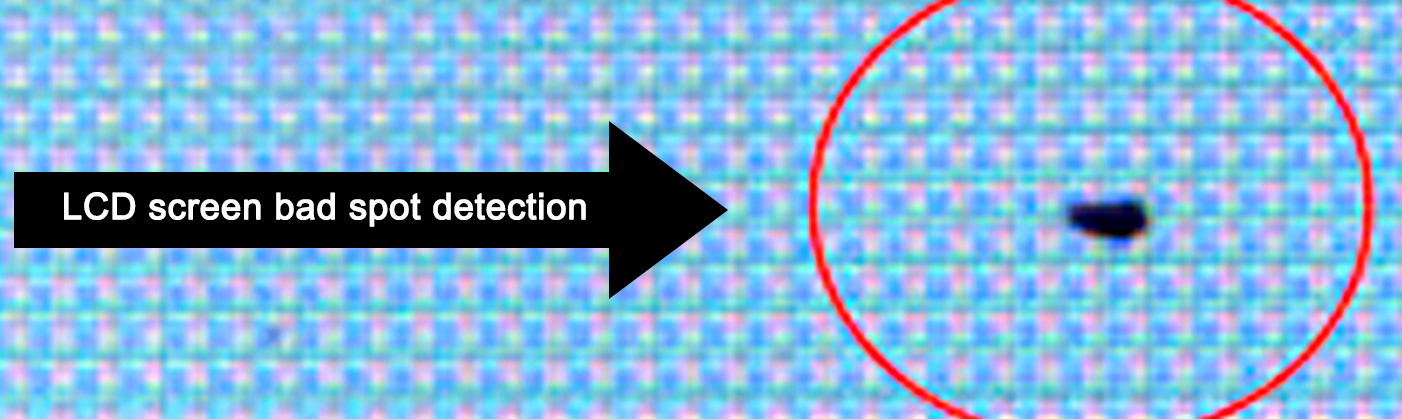
Hogyan különbözik a soros szkenneres képfeldolgozás a területi szkennerestől – mozgáskép-elmosódás kiküszöbölése és végtelen függőleges felbontás lehetővé tétele
A területi szkenner kamerák egyszerre teljes 2D-képeket készítenek, míg a vonalszkenner kamerák másképp működnek. Ezeknek csak egyetlen pixelek sorból álló sora van, amely fokozatosan építi fel a képeket, ahogy a tárgyak áthaladnak a kamera látóterén. A rendszer a mozgással szinkronizálódik például forgó vagy lineáris kódolók segítségével, így akár nagyon gyors mozgás esetén sem keletkezik elmosódás – néha akár 10 méter/másodperc feletti sebességnél is. Ebben az esetben a legfontosabb tényező az, hogy a függőleges felbontás gyakorlatilag korlátlanul növelhető. A kép magassága kizárólag attól függ, hogy milyen távolságon halad át a tárgy a kamera előtt, nem korlátozza azt a szenzor mérete. Ezért éppen a vonalszkenner technológia ragyog fel pontos feladatoknál, például félvezetők gyártás közbeni ellenőrzésénél vagy azoknál a hatalmas, 3000 mm széles fémtekercseknél, amelyeket nyomon kell követni. A hagyományos területi szkenner rendszerek ezen helyzetek kezelésére képtelenek anélkül, hogy vagy óriási, összevarrt képeket hoznának létre, vagy fontos részleteket veszítenének el a folyamat során.
A fő összetevők magyarázata: lineáris érzékelő, sornyomtatási motor, kódolófelület és valós idejű szinkronizációs logika
Négy egymástól függő összetevő teszi lehetővé ezt a pontosságot:
- Lineáris érzékelők , általában CMOS- vagy CCD-tömbök 1–16 ezer aktív pixellel, meghatározzák a vízszintes felbontást és a spektrális választ.
- Sornyomtatási motorok a képpontadatokat 10–140 kHz-es sebességgel dolgozzák fel, dinamikusan igazítva az objektum sebességét a mintavételezési frekvenciához.
- Kódolófelületek a mechanikai mozgást pontos indítójelekké alakítják – kvadratúr dekódolással elérve a ±0,01 % -os sebesség-szinkronizációt.
- Valós idejű szinkronizációs logika kiegyenlíti a rezgésből eredő ingadozást vagy a pillanatnyi sebességváltozásokat, és fenntartja a részpixelre pontos regisztrációt folyamatos szkennelés közben.
Ezek az elemek együttesen lehetővé teszik torzításmentes képalkotást hengerfelületeken, végtelen szalagokon és hőmérsékleti ingadozásra érzékeny anyagokon – olyan képességek, amelyek alapvetően nem érhetők el terület-alapú architektúrák esetében.
Pontos illesztés a vonalsebesség, mozgási sebesség és térbeli felbontás között
A vezérlőegyenlet: Δx = v / fline – és hogyan alkalmazzuk a képpont–mm kalibrációhoz
A pontos térbeli mérések eléréséhez vonalas beolvasásos képfeldolgozásnál alapvetően az számít, hogy mennyire illeszkedik össze az objektum sebessége (v) a kamera vonalgyakoriságával (fline). Ennek a folyamatnak a lényege egy egyszerű képlet: Δx = v / fline, amely megadja, hogy egy-egy képpont valójában mekkora távolságnak felel meg. Tegyük fel például, hogy egy szállítószalag 500 milliméter/másodperc sebességgel mozog, és a kameránk vonalgyakorisága 10 kHz. Ebben az esetben a számítás eredménye körülbelül 0,05 milliméter/képpont felbontás. A rendszerek kalibrálásakor nagyon fontos megbízható sebességmérést végezni. A legtöbb felhasználó e célból lézer-Doppler-sebességmérőket alkalmaz, majd addig finomhangolja a vonalgyakoriságot, amíg el nem éri a kívánt Δx értéket. Figyeljünk az eltérésekre is: ha a sebesség több mint ±2%-kal tér el a beállított értéktől, akkor hibák kezdhetnek megjelenni olyan fontos alkalmazásokban, mint például nyomtatott áramkörök vezetékvastagságának ellenőrzése, ahol a pontosság döntő jelentőségű.
Kódoló alapú szinkronizáció: részpixeles regisztráció biztosítása erős rezgésnek vagy változó sebességnek kitett környezetekben
Amikor a gépek rezegnek, vagy sebességük váratlanul megváltozik, ez időzítési problémákat okoz, amelyek miatt a képek kevésbé élesek lesznek, és a mérések nehezebben ismételhetők konzisztensen. Az inkrementális jeladó szinkronizálásával a mozgási rendszer pozícióvisszajelzésével pontosan meghatározható, mikor történik a képfelvétel. Ez azt jelenti, hogy akár 15%-os sebességváltozás esetén is elérhetők azok a részpixel-szintű regisztrációk, amelyek olyan fontosak a minőségellenőrzés szempontjából. A számok is beszélnek magukért: a forgó inkrementális jeladók szöget mérhetnek 0,001 fok pontossággal, míg a lineáris típusok pozíciót követnek legfeljebb 1 mikrométeres pontossággal. Ezek a képességek döntő különbséget jelentenek a nehéz ipari környezetekben. Gondoljunk például acélgyártó üzemekre, ahol minden folyamatosan rezeg, vagy textilgyárakra, ahol a feszültség pillanatról pillanatra változik. Megfelelő inkrementális jeladó-szinkronizációval a rendszerek valódi hibákat észlelnek, nem pedig tévesen dobva el a jó termékeket. Tanulmányok szerint ez a megközelítés körülbelül 40%-kal csökkenti a téves visszautasítások számát összehasonlítva a régi, triggerpontok nélküli, szabadon futó módszerekkel.

Alkalmazásvezérelt kiválasztási kritériumok ipari gyakorlati esetekhez
Web-ellenőrzés: feszültségváltozások kezelése, varrásfolytonosság és valós idejű hibahelymeghatározás
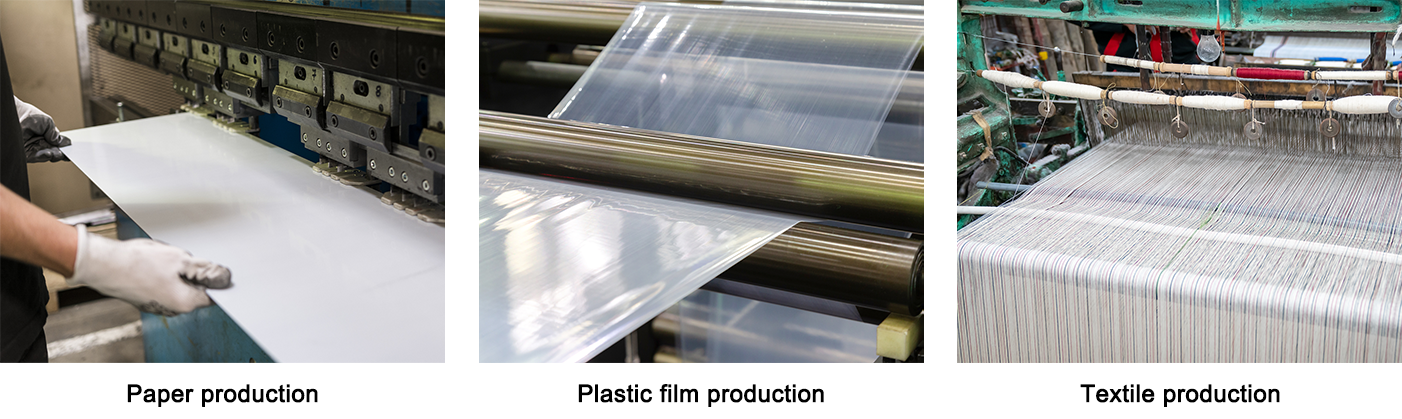
Amikor folyamatosan mozgó, hosszú anyagokkal – például papírral, műanyag fóliákkal, fémfóliákkal vagy textíl szalagokkal – dolgoznak, a megfelelő vonalszkennelő kamerák kiválasztása három fő szemponttól függ, amelyek a gyártóüzemben a legfontosabbak. Az első kihívás a folyamat során fellépő feszültségváltozásokból eredő sebesség-ingadozások kezelése. Ennek kezeléséhez olyan adaptív vezérlők szükségesek, amelyek legalább 20 kHz-es frekvencián működnek, és amelyekhez kódoló visszacsatolási hurkok tartoznak, így a képek a teljes szélesség mentén pixelenként pontosan illeszkednek egymáshoz. A második kihívás az, hogy a képeket hézagmentesen össze lehessen illeszteni: ehhez a pixeltömböknek gondosan átfedőnek kell lenniük. A gyártók általában egy mikroszekundumnál jobb szinkronizációt céloznak meg, hogy folytonosságot biztosítsanak a végső minőségellenőrzési eredményekben. A harmadik kihívás a hibák azonnali észlelése, amely nagymértékben az eszközön belüli feldolgozó teljesítménytől függ. Számos modern rendszer ma már FPGA-chipeket használ az alapvető képfeldolgozási feladatok – például küszöbérték-detektálás – gyorsítására, így a problémákat mindössze öt milliszekundumon belül jelezhetik, mielőtt a termékek elutasításra kerülnének. Egy 2023-as kutatási eredmény azt mutatta, hogy az area-szkennelőről vonalszkennelő technológiára való áttérés majdnem 92%-os javulást eredményezett a hibafelismerési arányban nyolc méter/másodperc vonalsebesség mellett, ami magyarázza, miért váltanak egyre több konverter ezen a területen erre a technológiára.
Hengeres alkatrész szkennelése: szögfelbontás-leképezés, forgó kódoló igazítása és a látómező torzulásának buktái
Forgó alkatrészek, például palackok, csapágyak vagy autós tengelyek kezelésekor az elfordulási felbontás kulcsszerepet játszik a megfelelő érzékelő kiválasztásában. Az alapvető képlet valahogy így néz ki: N egyenlő π-szer a átmérő osztva az RPM-el, szorozva 60-nal és a szükséges térbeli felbontással. A pontos számok meghatározása fontos, mert rosszul beállított forgó kódolók problémákat okozhatnak. Kb. az esetek felében ezek a beállítási hibák 15%-nál nagyobb sugaras torzulást eredményeznek, ezért sok szakember először kvadratúr jelek segítségével ellenőrzi a beállítását. Egy másik figyelendő tényező az optikai torzulás. A szokásos lencsék tendenciájuk szerint eltorzítják a képeket a görbült széleken, amit hordótorzulásnak nevezünk. Ezért egyes alkalmazások inkább telecentrikus optikát használnak, amelyek az egész látómezőben 0,1%-nál kisebb mérési hibát biztosítanak. Automobilipari tengelyvizsgálatoknál, ahol a fényvisszaverődés (glare) problémát jelent, az 8 bites érzékelőkről a 12 bites érzékelőkre való áttérés jelentős különbséget jelent. A legtöbb szerviz kb. 70%-os csökkenést jelent a hamis pozitív mérések számában az áttérés után, bár az eredmények a konkrét körülményektől függően változhatnak.
Soros leolvasó kamera és területi leolvasó kamera: Mikor melyiket érdemes választani a maximális ROI eléréséhez
Öt döntő forgatókönyv, amelyben a soros leolvasó kamera kiváló teljesítményt és költséghatékonyságot nyújt
Bár a területi leolvasó kamerák továbbra is ideálisak diszkrét, álló vagy alacsony sebességű tárgyak esetén, a soros leolvasó technológia kiváló teljesítményt – és erősebb ROI-t – biztosít öt nagytermelésű ipari alkalmazásban:
- Nagyon gyors folyamatos anyagvizsgálat (papír, fólia, fóliák), ahol a mozgáskép-elmosódás rontja a területi leolvasó kamerák pontosságát; a soros leolvasó kamera torzításmentes, egydimenziós szeleteket rögzít 70 kHz-nél nagyobb frekvencián, lehetővé téve a zavartalan, kilométeres skálájú képfeldolgozást.
- Fémcsík-figyelés forró hengerlés közben, ahol a hőmérsékletváltozások és a szerkezeti rezgések miatt kódolószinkronizált rögzítésre van szükség a részpixeles regisztráció fenntartásához.
- Szövetgyártással textíliák vizsgálata, ahol a textíliák rugalmassága és feszültségváltozékonysága a valós idejű pixelellenőrzéssel kezelhető – elkerülve a varrat-hibákat, amelyek jellemzők a többkamerás területi leolvasó rendszerekre.
- forgó hengeres alkatrészek 360°-os vizsgálata , ahol a szögfelbontás-térképezés lehetővé teszi a mikronos szintű hibák észlelését 2000 RPM-nél nagyobb sebességeken.
- Nagy felületű szkennelés (nappanelek, űrkutatási kompozitok), ahol a vonalszkennelés megszünteti a költséges többkamerás igazítás és kalibrálás szükségességét.
Ezekben az alkalmazásokban a vonalszkennelő rendszerek 30–60%-kal csökkentik a hardver- és integrációs költségeket, miközben körülbelül 15%-kal csökkentik a hamis elutasításokat – amelyeket gyakran a területi szkennelő rendszerek mozgásból eredő torzításai okoznak. Skálázhatóságuk és egyetlen érzékelőn alapuló architektúrájuk 8–12 hónapos megtérülést biztosít nagytermelési kapacitású gyártási környezetekben.

Készen áll a megfelelő vonalszkennelő kamera kiválasztására ipari alkalmazása számára?
A megfelelő vonalszkennelő kamera a megbízható, nagysebességű ipari ellenőrzés alapja – egyetlen algoritmus vagy szoftver sem tudja ellensúlyozni azt, ha a kamera nem illeszkedik a vonal sebességéhez, a felbontási igényekhez vagy a gyártási környezethez. A vonalarány, az érzékelő felbontása, az enkódszinkronizáció és az optikai tervezés pontos összehangolásával az Ön konkrét alkalmazásához ön zárják fel a hézagmentes, mikronos pontosságú ellenőrzést, csökkentett hamis elutasításokat és mérhető megtérülést gyártási műveleteik számára.
Ipari minőségű vonalszkennelő kameramegoldásokhoz – amelyeket webellenőrzési, hengeres szkennelési vagy nagyformátumú képfeldolgozási alkalmazásukhoz igazítottak –, illetve teljesen integrált gépi látási rendszer építéséhez kiegészítő megvilágítással, objektívekkel és kódolószinkronizáló eszközökkel (amelyeket a HIFLY kínál), válasszanak olyan szolgáltatót, amelynek ipari gépi látási szakértelemmel gyökerező tapasztalata van. HIFLY 15 évnyi tapasztalatunk kiterjed az ultragyors, 10 GigE-s, 8K felbontású vonalszkennelő kamerákra, a többspektrális képalkotó rendszerekre és a végponttól végpontig terjedő ipari ellenőrzési megoldásokra – mindezt az ISO 9001:2015 szabványnak megfelelő tanúsítással, 30-nál több találmányi szabadalommal és több mint 2500 ügyfél támogatásával 30+ országban. Lépjenek kapcsolatba velünk még ma ingyenes, kötelezettséget nem vállaló konzultációért, hogy kiválasszák a legmegfelelőbb vonalszkennelő kamerát műveleteikhez.





