

A területi kamerák és vonalszkenneres kamerák közötti különbség
A területi és vonalas pásztázó kameráknak jelentős különbségeik vannak a képalkotási elvben, alkalmazási területekben és másokban, az alábbiak szerint:
1. Alapvető különbségek: képalkotó szerkezet és módszer
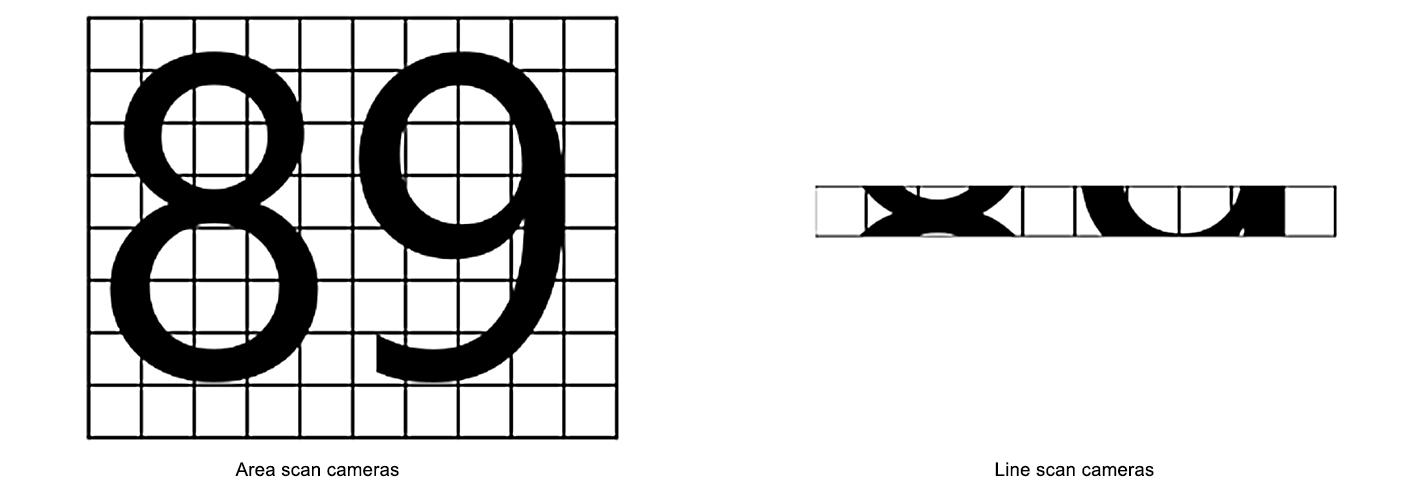
Területvizsgáló kamerák: A szenzor kétdimenziós felület (mátrixhoz hasonló). Egy teljes kétdimenziós kép közvetlenül egy exponálással rögzíthető. A mindennapi életben használt eszközök, mint például mobiltelefonok és tükörreflexes kamerák területi pásztázó kamerákhoz tartoznak.
Vonalvizsgáló kamerák: A szenzor egy vonal (egydimenziós tömb). Együtt kell működnie az objektum vagy a kamera mozgásával (például szállítószalag mozgása, kamera pásztázása), hogy soronként készítsen felvételeket, majd összetegye őket egy kétdimenziós képpé. Olyan, mint egy padló seprűvel való sepregetése, ahol a mozgás révén fedi le a teljes területet.
2. Alkalmazási területek különbségei
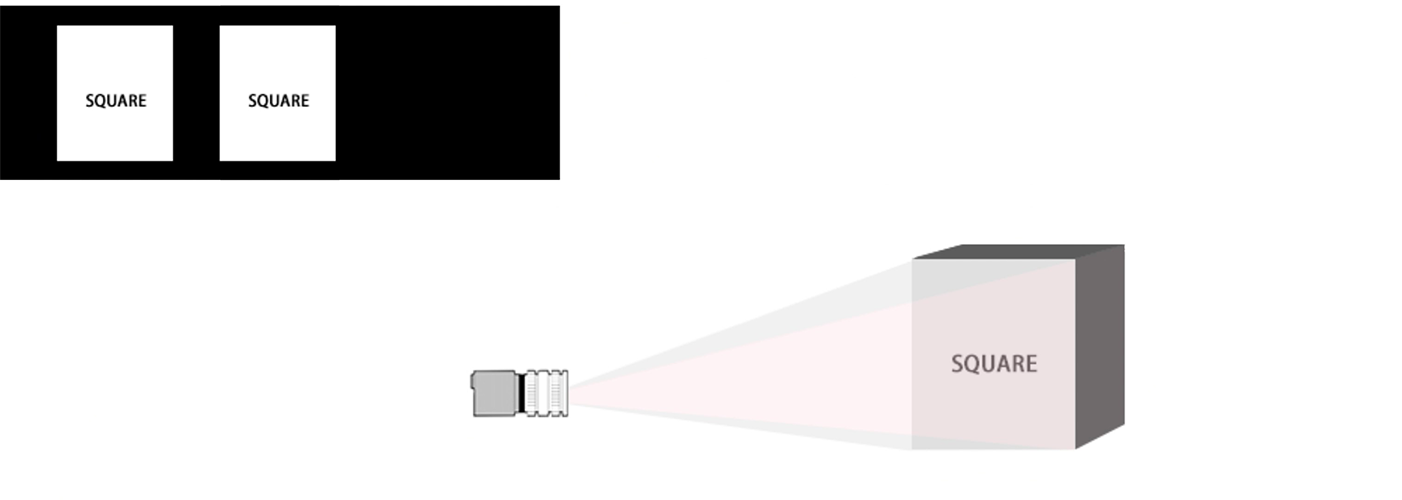
Területvizsgáló kamerák: Stacionárius objektumok vagy lassan mozgó objektumok fényképezésére alkalmas, például személyazonosító fényképek, statikus termékellenőrzés, mindennapi fotózás stb. Előnyük az egyszerű kezelhetőség és a teljes kép gyors rögzítése.
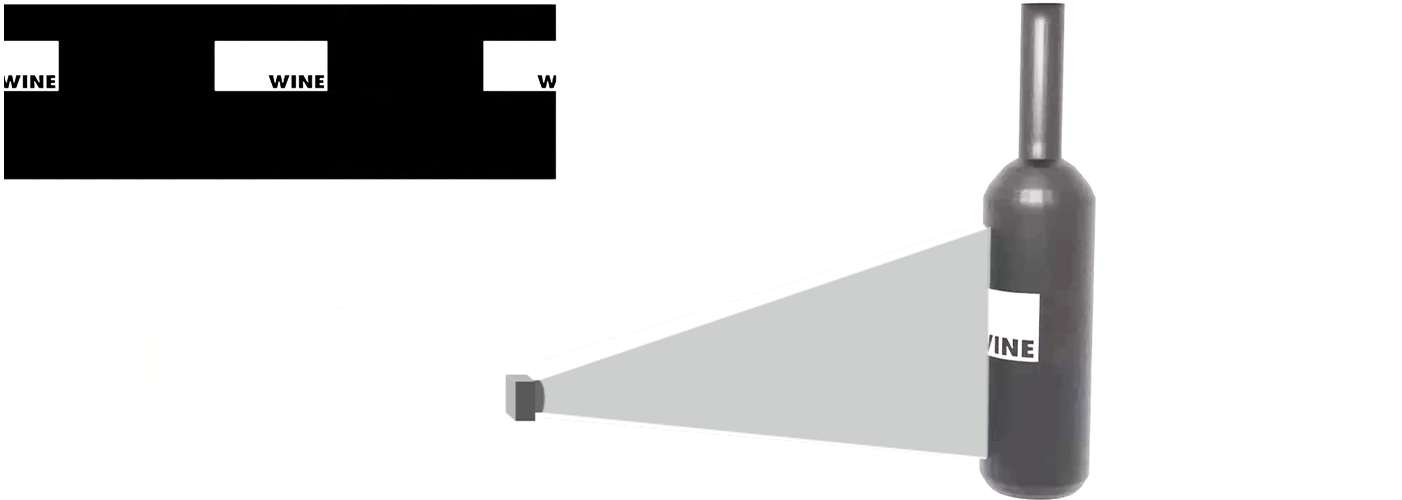
Vonalvizsgáló kamerák: Nagy területű, gyorsan mozgó tárgyak felvételére alkalmas, például szövetek és papír folyamatos ellenőrzése, útburkolat szkennelése, nyomtatott termékek minőségellenőrzése stb. Előnyük a magasabb képalkotási felbontás és a részletek élesebb megjelenítése hosszú, szakaszos vagy folyamatos mozgás esetén.
3. D ifferenciáló működési elvek
A területi és vonalas képalkotó kamerák működési elveiben a szenzor felépítése és képalkotási módszer különbségek jellemzők, az alábbiak szerint:
(1).Területi képalkotó kamerák működési elve
Szenzor felépítése: A magja egy kétdimenziós területi tömb szenzor (például CCD vagy CMOS), amely számos pixelekből álló sík mátrixból (rács-szerű struktúra) épül fel.
Képalkotási folyamat: A zár megnyitása után a fény egyszerre sugározza a teljes terület-szenzorot a lencsén keresztül. Az érzékelő minden egyes pixele szinkron módon fogadja a fényt, és elektromos jelzéssé alakítja. A feldolgozás után közvetlenül teljes kétidimenziós képet (a szélesség és magasság információival együtt) generálnak.
Jellemzők: A teljes kép felvételét egyetlen expozícióval lehet befejezni, külső mozgásra való támaszkodás nélkül, és alkalmas a statikus vagy alacsony sebességű mozgó tárgyak rögzítésére.
(2).A vonalvizsgáló kamerák működési elve
Szenzor felépítése: A mag egy egydimenziós vonal-sorozat érzékelő, amelynek a pixelei egyenes vonalban vannak elrendezve (csak egy sor pixelt tartalmaz).
Képalkotási folyamat: A vonalas érzékelő csak egy soros képinformációt tud egyszerre rögzíteni (csak szélességi információval). Az objektum egyenletes mozgására (például szállítószalag által meghajtva) vagy a kamera saját pásztázó mozgására támaszkodik, hogy az érzékelő különböző pozíciókban tudjon soronként képeket rögzíteni. Ezután ezeket a folyamatos soros képeket a szoftver összeilleszti, így jön létre végül egy teljes kétdimenziós kép (a mozgás által létrehozott szélesség + hosszúság).
Jellemzők: Külső mozgás összehangolására támaszkodik, folyamatos, nagy sebességű vagy nagy felületű objektumok leképezésére alkalmas, és mozgás közben is megőrzi a magas felbontást.
4. Egyéb kulcsfontosságú különbségek
Felbontás és képkockázati sebesség: A vonalpásztázásos kameráknak általában több pixelük van egyetlen irányban, így képesek nagy felbontású képalkotásra nagy sebességű mozgás mellett is; a területpásztázásos kamerák pedig rugalmasabb képkockasebességgel (másodpercenkénti felvételek száma) rendelkeznek, amelyek alkalmasak pillanatfelvételek rögzítésére.
Költség és összetettség: A vonalszkenneres kameráknak mozgatószerkezettel kell rendelkezniük, így a rendszer összetettebb és költségesebb; a területvizsgáló kamerarendszerek egyszerűek, és költségük viszonylag alacsony.





