

Négy gyakori típusa a 3D látásnak
Ahogy a 3D látástechnológia folyamatosan fejlődik, különböző megoldások jelentek meg különböző ipari és kereskedelmi igényekkel szemben. Ez a cikk a HIFLY négy gyakori 3D képszerzési technológiát tárgyalja, elemzi működési elveiket, előnyeiket, korlátait és tipikus alkalmazási eseteiket.
1. Kétszemélyes látókamera
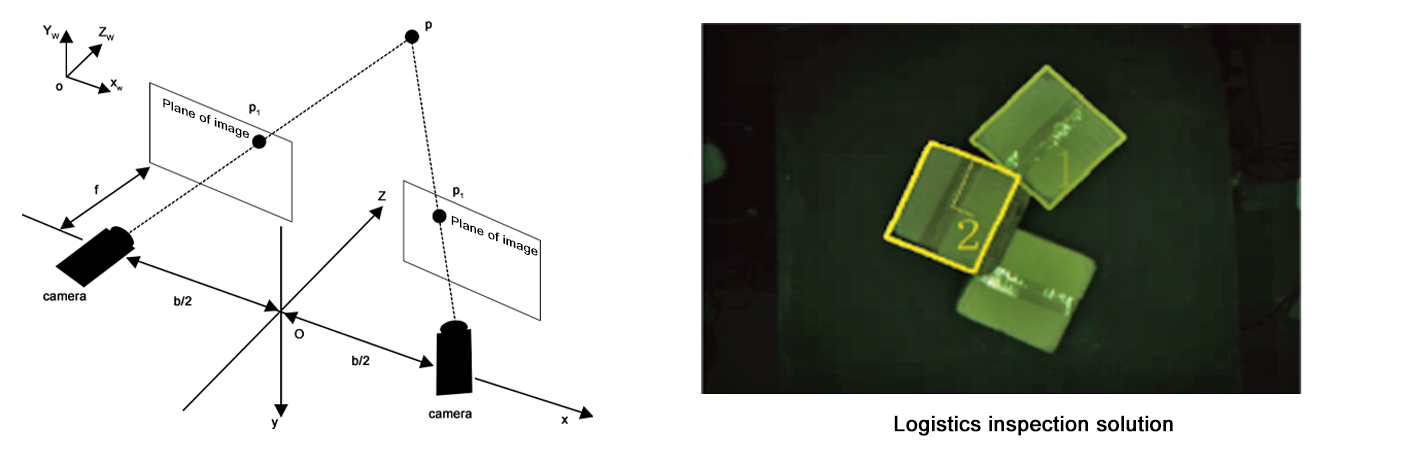
Az emberi kétszemű látáshoz hasonlóan működnek a sztereoszkopikus látórendszer-kamerák, amelyek két szögletes kamerát használnak kicsit eltérő szögből vett képek felvételére. A két kép közötti pixelszórás (disparitás) kiszámításával a rendszer becsüli a mélységi információkat, és 3D modelleket épít fel.
Előnyök:
Alacsony költségű hardverkonfiguráció
Egyszerű rendszerstruktúra
Könnyű megvalósítás és működés
Korlátozások:
Korlátozott pontosság (tipikusan milliméter-szinten)
Egyéb elég a magas-pontosságú ipari alkalmazásokhoz
Alkalmazások: Alapvető objektumfelismerés, önvezető jármű navigáció és fogyasztói szintű mélységszénzor.
2. Lézeres vonal profilozó
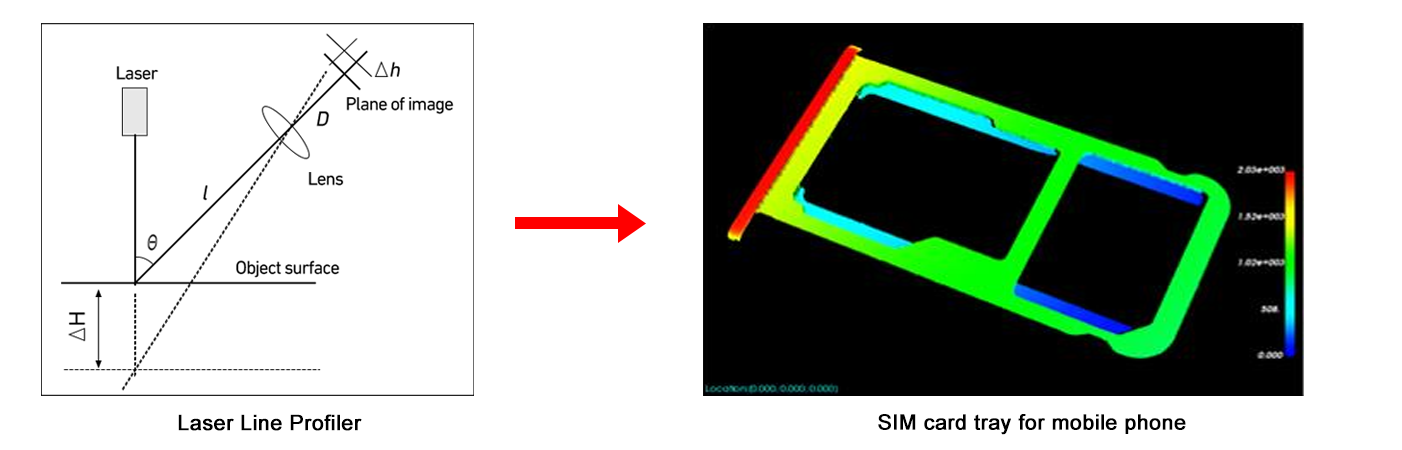
Ez a rendszer egy laser vonal vetítőt kombinál egy rögzített szöggel helyezett kamerával. Amikor a laser sáv az objektum felszínén halad át, a kamera felveti a vetített vonal torzulásait, hogy 3D pontfelhőket hozzon létre.
Előnyök:
Kiváló Z-tengely pontosság (altérnível)
XY-tengely pontosság néhány micron belöl
Tökéletes síkosság/magasság-mérésekhez
Korlátozások:
Koordinált mechanikai mozgást igényel
A teljesítmény csökken tükröződő felületekkel.
Ipari Hegemonia: Jelenleg a legszertebb 3D látási megoldás a gyártásban a minőségi ellenőrzés és a méretei igazolás szempontjából.
3. Strukturált Fény 3D Kamera
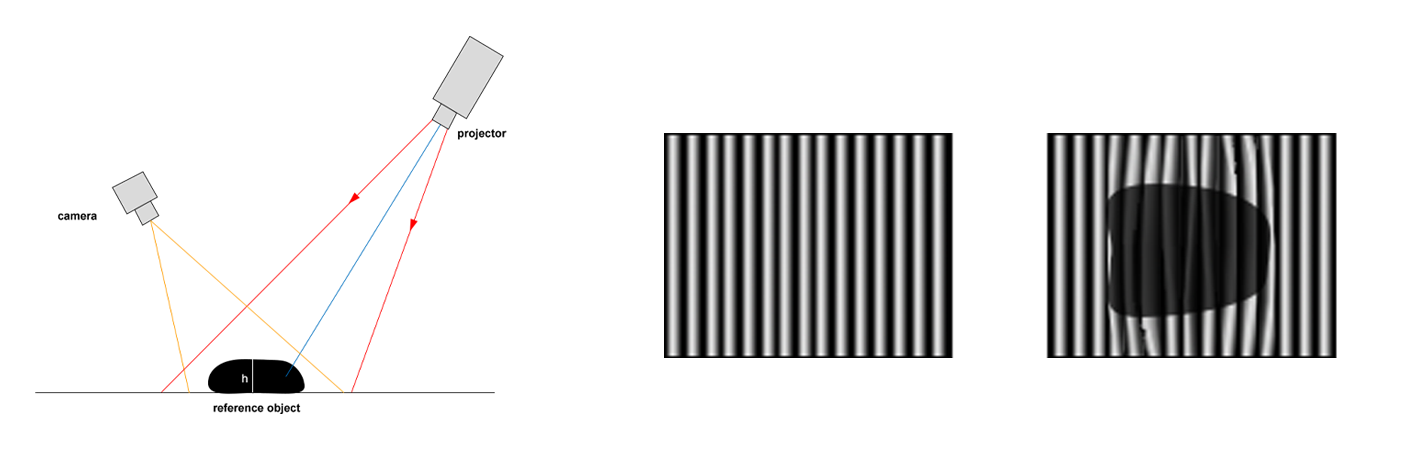
Ez a technológia kódolt fénymintázatokat (hálózatokat vagy speckle-okat) vetít fel az objektumokra. Egy vagy több kamera elemzi az objektum felületei által okozott torzuló mintázatokat a 3D koordináták kiszámításához.
Előnyök:
Nem-kapcsolati mérések
Mozi nélküli szkennelési képesség
Mikroszintű pontosság kis látóterekben
Hatékony nagyméretű alkalmazásokban
Korlátozások:
Magasabb berendezési költségek
Érzékeny a környezeti fény zavarására
Fő alkalmazás: 3D véletlenszerű rögzítés
4. Time-of-Flight (ToF) Lézer Skennerek
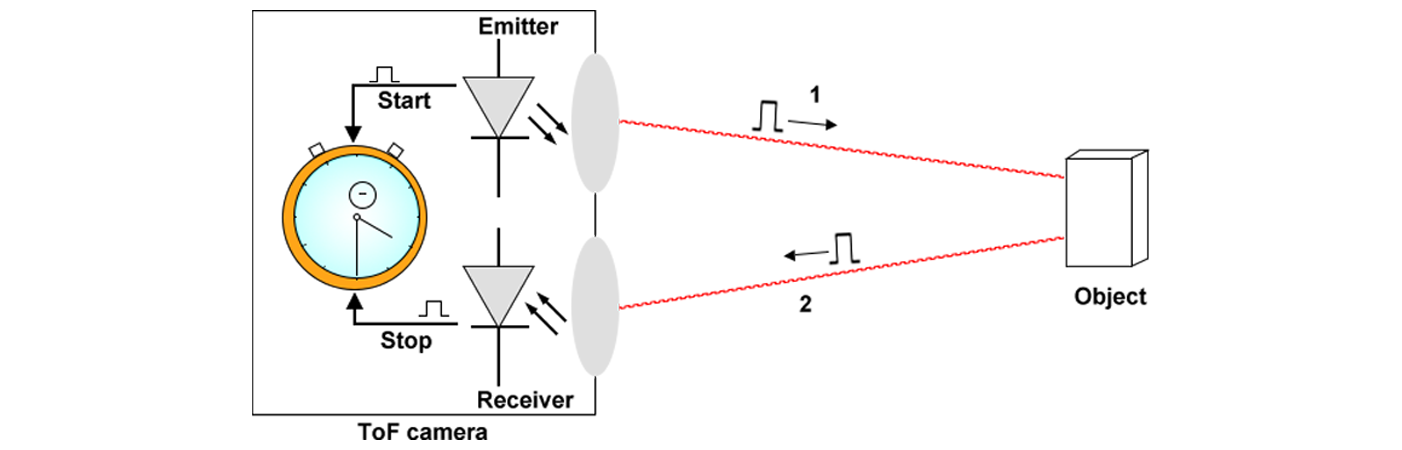
A ToF rendszerek mérjék az infravörös lézermódszeres impulzusok körút időpontját a távolságok kiszámításához. Ez a közvetlen út-idő mérése lehetővé teszi a valós idejű 3D térképezést.
Előnyök:
Kiváló valós idejű teljesítmény
Teljes területi mélységi beszerzés
Kompakt rendszerméret
Korlátozások:
Korlátozott mérési pontosság
Többszörös útvonalú zavarra érzékeny
Kereskedelmi elterjedtség: Széleskörűen használják a fogyasztói elektronikában (VR/AR), a biztonsági rendszerekben és az orvosi képalkotásban. Az ipari alkalmazások elsősorban AGV akadályelkerésre és alapvető navigációra korlátozódnak.
Technológiai összehasonlítás és kiválasztási útmutató
Minden technológia adott forgatókönyvekben éri el a legjobb teljesítményt:
Költségszensitivity alkalmazások: SZTEREÓ LÁTÁS
Ultra-precíz igények esetén: Lézeres vonalprofiling
Komplex felület-alkanás: STRUKTÚRÁLT FÉNY
Valós idejű dinamikus érzékelés: ToF rendszerek





