

Hány ipari kamera tud egy gazda támogatni látási rendszerben?
A modern látási rendszerekben annak meghatározása, hogy egyetlen gazdagép (pl. számítógép vagy kiszolgáló) hány kamerát tud támogatni, kulcsfontosságú kérdés a rendszertervezés, skálázhatóság és költségoptimalizáció szempontjából. A válasz több egymással összefüggő tényezőre tesz szert, beleértve a hardver képességeit, a szoftver hatékonyságát, az ipari kameraspecifikációkat és az alkalmazás igényeit. Ez a cikk ezeket a kulcselemeket vizsgálja és egy keretet nyújt a kamera kapacitás becsléséhez egy látási rendszerben.
1. Hardverkomponensek és hatásaik
A gazdagép hardvere az alapja a kamera támogatásnak, két kulcsfontosságú szempont játszik itt fő szerepet.
1.1 Feldolgozási egységek: CPU és GPU
A CPU széles körű képfeldolgozó feladatokat kezeli, az alapvető szűrőktől a bonyolult gépi tanulási következtetésig. A magas felbontású vagy magas képkockaszámú kamerák nagy adatmennyiséget generálnak, amely terhelésbe vonja a CPU-t. A többmagos CPU-k, mint az Intel i9 vagy az AMD Threadripper, eloszthatják a feladatokat a magok között párhuzamos feldolgozáshoz. Másrészt a GPU-k forradalmi változást hoznak a látási rendszerekben, gyorsítva a párhuzamos számítást, különösen fontos feladatoknál, mint például a 3D látás és a mély tanulás az önvezetős járművekben. A GPU-optimalizált folyamatokkal integrált kamerák, mint például az NVIDIA GPU-k CUDA technológiájával, megosztják a feldolgozást a CPU-tól, potenciálisan háromszorosítva a támogatott kamerák számát.
1.2 Memória, Tárolás és Bemenet-Kimenet
A megfelelő RAM elengedhetetlen a videofolyamok és a feldolgozott adatok tamponozásához. Egy 4K kamera 30 FPS-on kb. 300 MB/s nyomtalanított adatot termel, ami növeli a memóriaigényt többkamerás rendszerekben. Magas felbontású kamerák esetén hozzárendelj legalább 4–8 GB RAM-ot kameránként. A gyors tárolók, mint az NVMe SSD-k, valamint a robusztus I/O szintézisek, például a USB 3.2 és a PCIe fontosak az adatfeldolgozás és -tárolás szempontjából. Az örökölt csatolók komolyan korlátozhatják a rendszer skálázhatóságát.
2. Ipari Kamera specifikációk
Az ipari kamera paraméterei közvetlenül befolyásolják a gazdagép-rendszer terhelését, elsősorban a következő két kulcsfontosságú tényező által.
2.1 Felbontás és képkockasebesség
A magasabb felbontás és képkockaszám több adatot jelent a feldolgozáshoz. A 4K kamera négyszer annyi pixelt termel, mint egy 1080p-es kamera, ami jelentősen növeli a feldolgozási igényeket. Hasonlóképpen, egy 120 FPS-es kamera négyszer annyi adatot generál, mint egy 30 FPS-es. A sportadásokban használnak magas felbontású, magas képkockaszámú kamerákat, amelyek extrém terhelést rónak a gazdagépre, hatékony hardver nélkül minőségveszteséggel járva.
2.2 Tömörítés és interfész
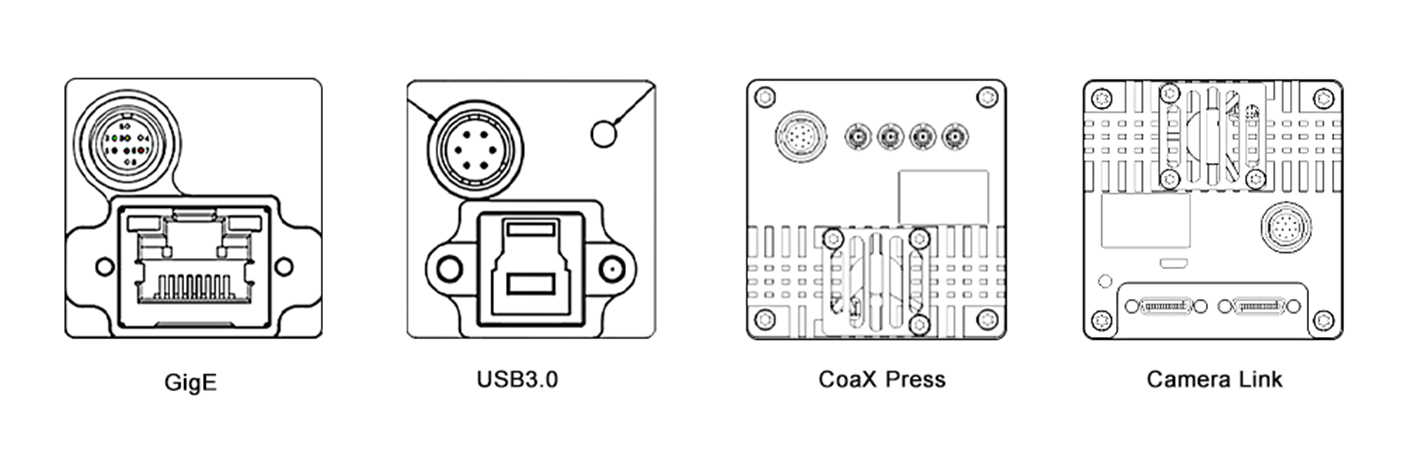
A tömörítési formátum választása befolyásolja az adatméretet és a feldolgozási költségeket. Tömörített formátumok, mint az H.264 csökkenti a sávszélességet, de dekódolást igényelnek a gazdagépen. A nem tömörített formátumok jobb hűséget nyújtanak, de több erőforrást fogyasztanak. Emellett a kamera interfész típusa is fontos. A magas sebességű interfészek, mint a GigE Vision és a CoaXPress lehetővé teszik a hatékony adatátvitelt több kamera beállításoknál, míg a régi interfészek, mint a USB 2.0 korlátozzák a skálázhatóságot a korlátozott sávszélesség miatt.
3. Szoftver és feldolgozási lánc
A szoftver hatékonysága szintén kritikus, ezek a két terület az egyesület teljesítményének kulcsa.
3.1 Operációs Rendszer és Szoftvereszközök
Az operációs rendszer és illesztőprogramjai alkotják a szoftveres alapot. A valós idejű operációs rendszerek (RTOS) csökkentik a késleltetést, amely tökéletes robotellenőrzéshez hasonló alkalmazásokra. A Linux-alapú rendszerek népszerűek nyílt forrású támogatás miatt. Az optimalizált illesztőprogramok növelik a hardver teljesítményét. Látó szoftverek és könyvtárak, mint például az OpenCV, MATLAB, valamint mély tanulási keretrendszerek, mint a TensorFlow és PyTorch, változnak a számítási hatékonyságban. Például, egy olyan gazda, amely egy GPU-gyorsított YOLO modellt futtat, kevesebb kamerát támogathat, mint egy alapértelmezett élziszlálást használó, ami magasabb bonyolultságnak köszönhető.

3.2 Többszálúság és Optimalizálás
A hatékony többszálúság és párhuzamosítás alapvető a rendszer teljesítményének maximalizálásához. A többszálúság lehetővé teszi a feladatok futtatását egyidejűen a CPU magjain, míg a párhuzamosítás a GPU-kat használja adatfeldolgozási célokra. Az OpenMP és CUDA technológiák keretrendszert biztosítanak a megvalósításhoz. Többkamerás figyelőrendszerben az OpenMP eloszthatja a kameraadatfolyam feldolgozását a CPU magjai között, míg a CUDA gyorsíthatja az képfeldolgozást a GPU-n, amely lehetővé teszi több kamera kezelését.
4. Alkalmazási követelmények
A látási feladat bonyolultsága szabályozza a források elosztását, a valós idejű és a feldolgozási bonyolultság pedig a fő meghatározó tényezők.
4.1 Valós idejű vs. Offline feldolgozás
A valós idejű alkalmazások, például az önvezetős járművek és az ipari automatizálás, azonnali feldolgozást igényelnek alacsony késleltetéssel, ami korlátozza a távoli gép által támogatható kamera számot. Az offline feldolgozás, mint a kötegelt videofeldolgozás, több kamerát kezelhet, de késleltetett eredményekkel jár.
4.2 Feldolgozási bonyolultság
Egyszerű feladatok, mint a mozgásérzékelés alacsony számítási terheket rótnak, amely lehetővé teszi egy gazdinak több kamerát támogatni. Komplex feladatok, mint a 3D rekonstrukció vagy fejlettebb arcfelismerés jelentős erőforrásokat igényelnek, csökkentve a támogatott kamerák számát. Például, egy gazdija támogathat 10 kamerát mozgásérzékeléshez, de csak 3-at valós idejű 3D mélységbecsléshez.
5. Becslési Keretrendszer
Használja az alábbi lépéseket a kamera kapacitás becsléséhez:
Határozza meg a kamera paramétereit: Felbontás, képkockasebesség, tömörítés és interfész.
Számítsa ki az adatátviteli sebességet: Nem tömörített Adatátviteli Sebesség = Felbontás × Képkockasebesség × Bitmélység / 8 (pl., 1080p 30 FPS-nél = 1920×1080×30×24 / 8 = ~1,4 GB/s).
Értékelje ki a hardver korlátait: Győződjön meg arról, hogy a CPU/GPU feldolgozási teljesítménye ≥ az összes adatátviteli sebesség × feldolgozási túlterhelési tényező (2–5× bonyolult feladatok esetén).
Tesztelés prototípusokkal: Használja a benchmark eszközöket (pl., Intel VTune, NVIDIA Nsight) egyetlen kamera erőforrás-használatának mérésére, majd lineárisan skálázza (a párhuzamosítási nyereségek/kártyák figyelembe vételevel).
Összegzés
A tároló által támogatható kamerák száma látományrendszerben nem rögzített szám, hanem egy egyensúly a hardver képességei, a kamera specifikációi, a szoftver optimalizálása és a feladat bonyolultsága között. A legtöbb rendszerben a prototípusokkal való kezdés és a lépésről lépésre történő növekedés az erőforrás-használat figyelése alapján a legbiztosabb megközelítés. Ahogy a hardver (pl., gyorsabb GPU-k, AI gyorsítók) és a szoftver (pl., edge számítási keretrendszerek) gyors ütemben fejlődik, a több kamerát támogató és jobb teljesítményű kapacitás folyamatosan növekedni fog. Ez az evolúció lehetővé teszi a bonyolultabb és méretezhetőbb látomány megoldások fejlesztését, új lehetőségeket teremtve különféle iparágakban, az egészségügy és a közlekedéstől a biztonság és a szórakozásig.
A cikk alapvető ismereteket nyújt rendszertervezők és mérnökök számára, hangsúlyozva a személyre szabott tesztelés és optimalizálás szükségességét az alkalmazási igények megfeleléséhez. Az összes tényező figyelembe vételével lehet olyan látórendszereket tervezni, amelyek mind hatékonyak, mind pedig képesek a modern alkalmazások egyre növekvő kihívásaira válaszolni.





