

Gépi látás Kontúr felismerés
Az Ipar 4.0 és az intelligens automatizálás korszakában a gépi látás egy központi technológiává vált, lehetővé téve a gépek számára, hogy „lássanak” és pontosan értelmezzék a vizuális adatokat, sok esetben túlszárnyalva az emberi képességeket. Kulcsfunkciói közül kontúrérzékelés különösen kritikus: objektumok határoló alakját nyeri ki a digitális képekből, és ez képezi alapját az objektumfelismerésnek, méretek mérésének, hibák ellenőrzésének és robotmanipulációnak.
1. Mi a kontúrvizsgálat?
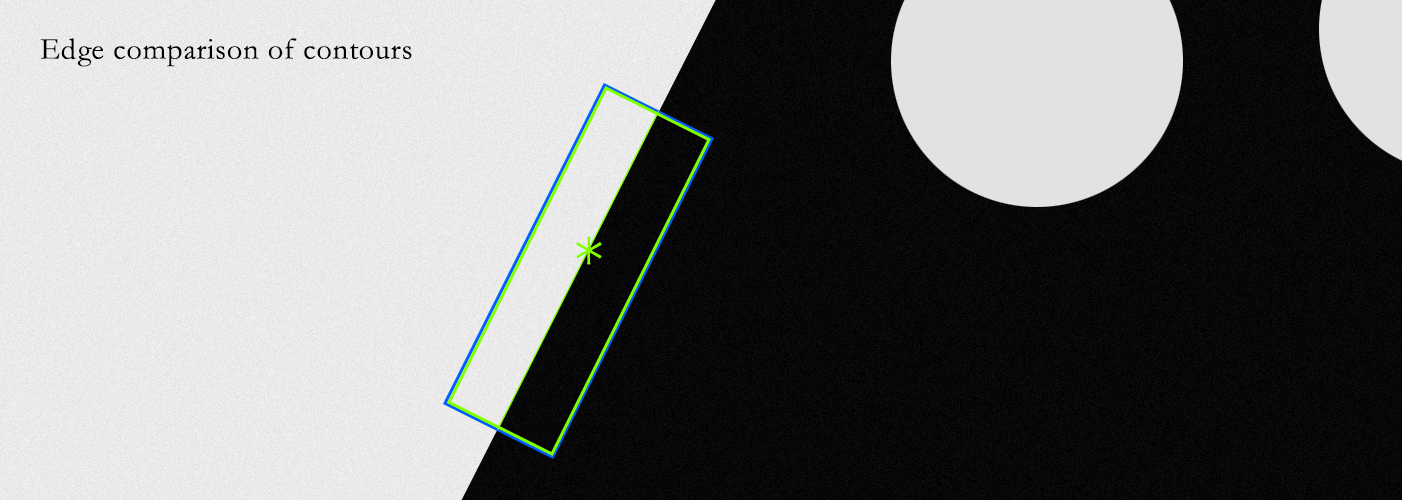
A „kontúr” a képalkotásban egy olyan görbe, amely folyamatos pontokat köt össze (egy objektum határvonalán) azonos intenzitással vagy színnel, elválasztva az objektumot a háttértől. A diszkrét élekkel szemben (pixelek közötti világos-sötét átmenetek), a kontúrák folyamatos hurkok (vagy nyitott görbék részleges objektumok esetén), amelyek az objektum alak , nem csupán elszigetelt intenzitásváltozásokat jelölnek.
A kontúrkövetés fő célja a képadatok egyszerűsítése: egy 2D-s kép csökkentése 1D-s kontúrvonalakká lehetővé teszi a gépek számára az objektum geometriájának (méret, szögek, szimmetria) hatékony elemzését, minden egyes pixel feldolgozása nélkül – ez elengedhetetlen a valós idejű alkalmazásoknál, ahol az sebesség és pontosság egyaránt fontos.
2. Alapelvek
A kontúrkövetés két kulcsfontosságú lépésen alapul: előfeldolgozás (az objektum-háttér kontraszt javítása) és kontúrkinyerés (a határoló pontok azonosítása). Ezek a lépések kezelik a nyers képek hibáit, mint zaj, egyenetlen megvilágítás vagy alacsony kontraszt, amelyek elmoshatják a határokat.
2.1 Előfeldolgozás
A nyers képeken ritkán láthatók éles határok, ezért az előfeldolgozás elengedhetetlen:
Szürkeárnyalatos átalakítás : A legtöbb algoritmus egycsatornás szürkeárnyalatos képeket használ (az adatok egyszerűsítése három RGB csatornáról egyre, mivel a szín gyakran nem releváns).
Zajcsökkentés : A Gauss-eltolású kép simítja a képet Gauss-mag segítségével, csökkenti a magas frekvenciájú zajt, miközben megőrzi a jelentős intenzitásváltozásokat – kritikus a hamis élek elkerüléséhez a szenzorinterferenciától vagy a megvilágítási ingadozásoktól.
Élérzékelés : Azonosítja a képpontok szintű intenzitásváltozásokat (éleket), amelyek kontúrokat határoznak meg. A Canny-élkijelző (egy többfokozatú módszer: simítás, gradiens számítás, nem-maximális elnyomás, hiszterézis küszöbölés) az arany standard, vékony, folyamatos éleket eredményez. A Sobel-operátor, amely kiemeli a vízszintes/merőleges éleket, vastagabb határok esetén is működik.
Küszöbölés : A szürkeárnyalatos élképeket bináris (fekete/fehér) képekké alakítja, ahol az előtér (objektumélek) értéke 1, a háttér pedig 0 – egyszerűsíti a kontúrvonal követését.
2.2 Kontúrkinyerés
Az előfeldolgozás után az algoritmusok összefüggő előtérbeli képpontokat követnek nyomon, hogy kontúrokat képezzenek. A Freeman-lánckód széles körben használt: a kontúrokat iránykódokként (felfelé, lefelé, balra, jobbra) ábrázolja az előző képponthoz viszonyítva, csökkentve a tárolási igényt, és lehetővé teszi az egyszerű alakzat-összehasonlítást. A OpenCV-hez hasonló könyvtárak megkönnyítik ezt a folyamatot a findContours() függvénnyel, amely visszaadja a kontúr képpontjainak koordinátáit, és szűrést tesz lehetővé (terület vagy oldalarány alapján) a zaj eltávolításához.

3. Haladó technikák
A hagyományos módszerek vezérelt, magas kontrasztú környezetekben működnek jól, azonban a valós alkalmazásokhoz (egyenlőtlen megvilágítás, átfedő objektumok) fejlettebb megközelítések szükségesek:
Adaptív küszöbölés : Minden képponthoz helyi küszöbértéket számol (egyetlen globális küszöb helyett), ideális változó megvilágítású képekhez (pl. ipari alkatrészek gyári lámpák alatt).
Mélytanuláson alapuló felismerés : A konvolúciós neuronhálók (CNN-ek) közvetlenül a nyers képekből vonják ki a határokat, kihagyva a manuális előfeldolgozást. Olyan modellek, mint a HED (Holistikusan Beágyazott Éldetektor) és RCF (Gazdagabb Konvolúciós Jellemzők) több skálán fúziós CNN jellemzők a nagy felbontású élképekhez, kiválóan működik összetett jelenetekben (orvosi képek, zsúfolt környezetek).
4. Fő kihívások
Az előrelépés ellenére a valós kihívások megmaradnak:
Zaj és megvilágítás : Gyártósorok, alacsony fény, vagy kültéri környezetek okozzák megszakadt/hamis kontúrokat.
Egymás mögött elhelyezkedő/takart objektumok : A rétegezett alkatrészek kontúrái összeolvadnak, így nehéz megkülönböztetni az egyéni formákat.
Átlátszó/visszatükröző anyagok : Az üveg vagy fém szétszórja a fényt, gyenge/torzított széleket eredményezve.
Valós idejű teljesítmény : Ipari feladatok (sorozatgyártási ellenőrzés) legalább 30 képkocka/másodperc (FPS) sebességet igényelnek. A mélytanulási modellek optimalizálásra szorulnak (kvantálás, GPU-gyorsítás), hogy elérjék a szükséges sebességet.
5. Alkalmazási pélák a valós világban
A kontúrvizualizáció meghajtja az automatizálást számos iparágban:
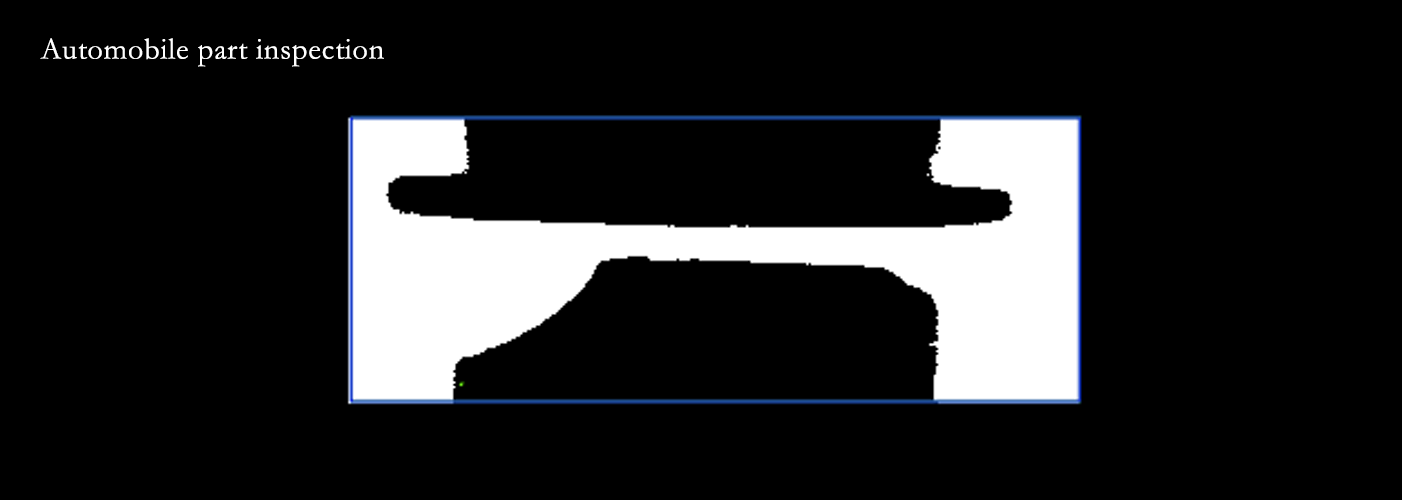
Ipari minőségellenőrzés : Gyártási hibák (repedések, horpadások) ellenőrzése. Például az autóipari gyártás során ellenőrizzük, hogy a motoralkatrészek (fogaskerekek, tömítések) megfelelnek-e a terv szerinti kontúroknak, és elutasítják a tűréshatáron túli alkatrészeket.
Robotikai pick-and-place (fogás és elhelyezés) : Segít a robotoknak tárgyak helyének meghatározásában. Raktárakban robotkarok használják a kontúrákat a csomagok azonosítására a szállítószalagon, a középpont/tájolás kiszámítására, majd az ölelés beállítására.
Orvosi képalkotás : Szegmentálja az anatómiai struktúrákat (daganatok CT-vizsgálat során, sejthatárok hisztológiai metszeteken) a diagnózis segítéséhez. A mélytanulási modellek jól kezelik a változó biológiai szöveteket.
Gazdálkodás : Rendezheti a gyümölcsöket (almák, narancsok) méret/érettség alapján kontúrelemzéssel, valamint felismeri a növényi betegségeket a levél kontúrváltozásokból.
Közlekedésfigyelés : Nyomon követi a járműveket, méri az áramlást, azonosítja a baleseteket (szokatlan kontúrok vagy álló objektumok révén) megfigyelő kamerák használatával.
6. Jövőbeli trendek
Három trend fogja alakítani a kontúrérzékelést:
Edge AI integráció : Könnyített modellek (kvantált CNN-ek) peremeszközökön (ipari kamerák, drónok) lehetővé teszik a valós idejű feldolgozást felhőalapú megbízhatóság nélkül – kritikus az autonóm robotok számára.
Többmódusú fúzió : A vizuális adatok LiDAR/termális képalkotással való kombinálása javítja a felismerést nehezen megvilágított körülmények között (pl. termális képalkotás fokozza a gyenge fényviszonyok közötti határokat; a LiDAR 3D mélységet ad az átfedő objektumokhoz).
Magyarázható MI (XAI) : Az XAI technikák megvilágítják, hogyan ismerik fel a mélytanulási modellek a kontúrokat, megnövelve a bizalmat kritikus területeken (orvosi diagnosztika, légi- és űripari ellenőrzés).
Következtetés
A gépi látás kontúrérzékelése összeköti a nyers képadatokat a hasznosítható információkkal, ezzel meghajtva az automatizálást és a minőségellenőrzést. A hagyományos élérzékeléstől a mélytanulásig fejlődött, hogy megbirkózzon összetett kihívásokkal. A technológia fejlődésével továbbra is központi szerepet játszik az intelligens rendszerekben, és lehetővé teszi, hogy a gépek az iparágak szerte képesebbé és megbízhatóbbá váljanak.





