

Berapa Banyak Kamera Industri yang Dapat Didukung oleh Satu Host dalam Sistem Visi?
Dalam sistem visi modern, menentukan berapa banyak kamera yang dapat didukung oleh satu host (misalnya, komputer atau server) merupakan pertanyaan kritis untuk desain sistem, skalabilitas, dan optimasi biaya. Jawabannya bergantung pada beberapa faktor yang saling terkait, termasuk kemampuan perangkat keras, efisiensi perangkat lunak, spesifikasi kamera industri, dan persyaratan aplikasi. Artikel ini menjelajahi variabel kunci tersebut dan memberikan kerangka untuk memperkirakan kapasitas kamera dalam sistem visi.
1. Komponen Perangkat Keras dan Dampaknya
Perangkat keras host merupakan dasar dari dukungan kamera, dengan dua aspek utama yang memainkan peran besar.
1.1 Unit Pemrosesan: CPU dan GPU
CPU menangani berbagai macam tugas pemrosesan gambar, dari filter dasar hingga inferensi pembelajaran mesin yang kompleks. Kamera dengan resolusi tinggi atau frame rate tinggi menghasilkan volume data besar, memberi tekanan pada CPU. CPU multi-core, seperti Intel i9 atau AMD Threadripper, dapat mendistribusikan tugas di antara core untuk pemrosesan paralel. Di sisi lain, GPU merevolusi sistem penglihatan dengan mempercepat perhitungan paralel, terutama penting untuk tugas seperti visi 3D dan pembelajaran dalam dalam dalam kendaraan otonom. Kamera yang diintegrasikan dengan pipa kerja yang dioptimalkan GPU, seperti CUDA pada GPU NVIDIA, memindahkan pemrosesan dari CPU, secara potensial meningkatkan tiga kali lipat jumlah kamera yang didukung.
1.2 Memori, Penyimpanan, dan I/O
RAM yang cukup penting untuk membuffers aliran video dan data yang telah diproses. Kamera 4K pada 30 FPS menghasilkan sekitar 300 MB/s data tanpa kompresi, meningkatkan kebutuhan memori dalam konfigurasi multi-kamera. Untuk kamera resolusi tinggi, alokasikan setidaknya 4–8 GB RAM per kamera. Penyimpanan berkecepatan tinggi, seperti NVMe SSD, dan antarmuka I/O yang kuat seperti USB 3.2 dan PCIe sangat penting untuk pengambilan dan penyimpanan data. Antarmuka lama mungkin secara signifikan membatasi skalabilitas sistem.
2. Industri Spesifikasi Kamera
Parameter kamera industri secara langsung memengaruhi beban pada sistem host, terutama melalui dua faktor kritis berikut.
2.1 Resolusi dan Tingkat Frame
Resolusi dan frame rate yang lebih tinggi berarti lebih banyak data yang perlu diproses. Kamera 4K menghasilkan empat kali lebih banyak piksel dibandingkan kamera 1080p, meningkatkan permintaan pemrosesan secara signifikan. Demikian pula, kamera 120 FPS menghasilkan empat kali lebih banyak data dibandingkan kamera 30 FPS. Dalam penyiaran olahraga, kamera dengan resolusi tinggi dan frame rate tinggi digunakan tetapi memberikan beban sangat tinggi pada host, memerlukan perangkat keras yang kuat untuk menghindari penurunan kualitas.
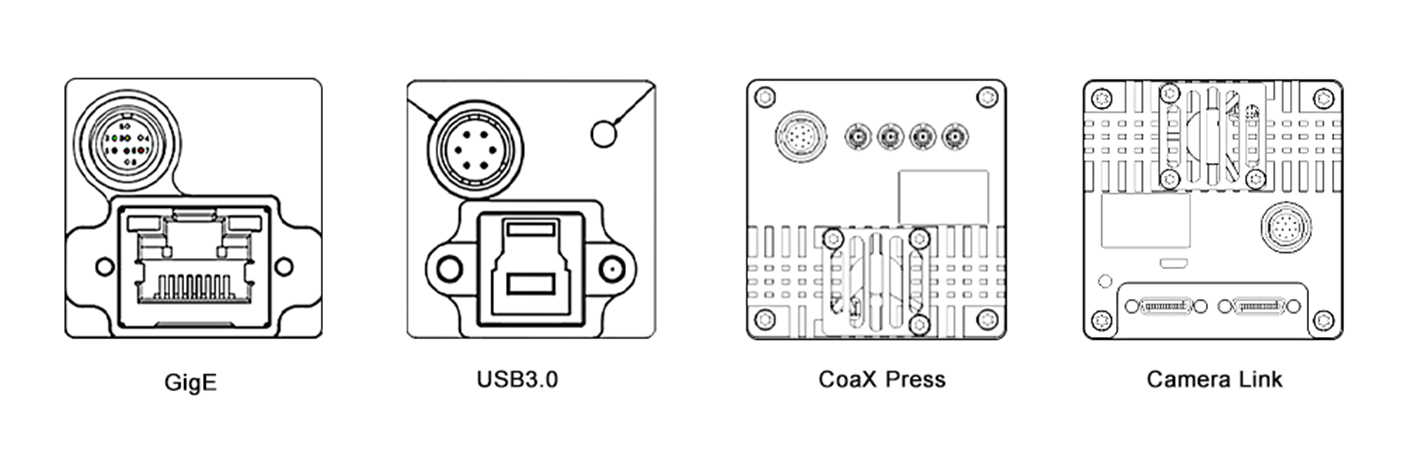
2.2 Kompresi dan Antarmuka
Pemilihan format kompresi memengaruhi ukuran data dan overhead pemrosesan. Format terkompresi seperti H.264 mengurangi bandwidth tetapi membutuhkan decoding di host. Format tanpa kompresi menawarkan kesetiaan lebih tinggi tetapi mengonsumsi lebih banyak sumber daya. Selain itu, tipe antarmuka kamera sangat penting. Antarmuka berkecepatan tinggi seperti GigE Vision dan CoaXPress memungkinkan transfer data yang efisien untuk konfigurasi multi-kamera, sementara antarmuka lama seperti USB 2.0 membatasi skalabilitas karena bandwidth terbatas.
3. Perangkat Lunak dan Pipa Pemrosesan
Efisiensi perangkat lunak sama pentingnya, dengan dua area ini menjadi kunci untuk performa sistem.
3.1 Sistem Operasi dan Alat Perangkat Lunak
Sistem operasi dan driver-nya membentuk fondasi perangkat lunak. Sistem operasi waktu nyata (RTOS) meminimalkan latensi, ideal untuk aplikasi seperti kontrol robotik. Sistem berbasis Linux populer karena dukungan open-source. Driver yang dioptimalkan meningkatkan performa perangkat keras. Perangkat lunak visi dan perpustakaan, seperti OpenCV, MATLAB, dan kerangka kerja pembelajaran dalam seperti TensorFlow dan PyTorch, bervariasi dalam efisiensi komputasi. Sebagai contoh, host yang menjalankan model YOLO dengan percepatan GPU mungkin mendukung lebih sedikit kamera daripada yang menggunakan deteksi tepi dasar karena kompleksitas yang lebih tinggi.

3.2 Multithreading dan Optimasi
Multithreading dan paralelisme yang efisien adalah kunci untuk memaksimalkan performa sistem. Multithreading memungkinkan tugas berjalan secara bersamaan pada inti CPU, sementara paralelisme memanfaatkan GPU untuk pemrosesan data. Teknologi seperti OpenMP dan CUDA menyediakan kerangka kerja untuk implementasi. Dalam sistem pengawasan multi-kamera, OpenMP dapat mendistribusikan pemrosesan feed kamera di antara inti CPU, dan CUDA dapat mempercepat analisis gambar di GPU, memungkinkan penanganan lebih banyak kamera.
4. Persyaratan Aplikasi
Kesulitan tugas visi menentukan alokasi sumber daya, dengan real-time dan kompleksitas pemrosesan menjadi penentu utama.
4.1 Pemrosesan Real-Time vs. Offline
Aplikasi real-time, seperti berkendara otonom dan otomasi industri, membutuhkan pemrosesan instan dengan laten rendah, membatasi jumlah kamera yang dapat didukung oleh host. Pemrosesan offline, seperti analisis video batch, dapat menangani lebih banyak kamera tetapi memiliki hasil yang tertunda.
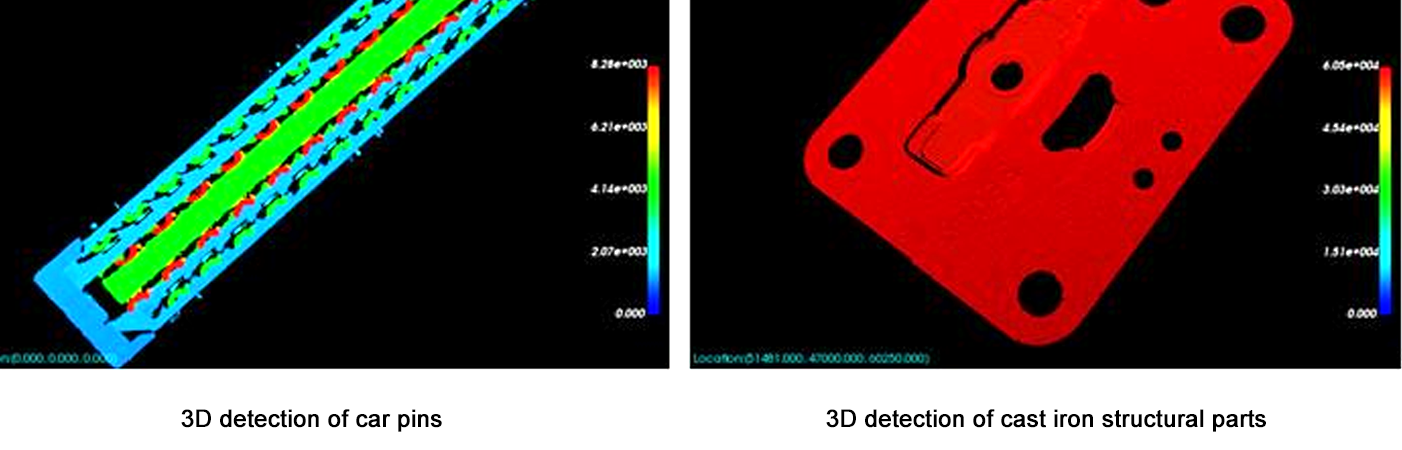
4.2 Kompleksitas Pemrosesan
Tugas sederhana seperti deteksi gerakan memberikan beban komputasi yang rendah, memungkinkan host mendukung lebih banyak kamera. Tugas kompleks seperti rekonstruksi 3D atau pengenalan wajah lanjutan memerlukan sumber daya yang signifikan, mengurangi jumlah kamera yang didukung. Sebagai contoh, sebuah host dapat mendukung 10 kamera untuk deteksi gerakan tetapi hanya 3 untuk estimasi kedalaman 3D waktu nyata.
5. Kerangka Penaksiran
Gunakan langkah-langkah berikut untuk menaksir kapasitas kamera:
Tentukan Parameter Kamera: Resolusi, tingkat frame, kompresi, dan antarmuka.
Hitung Data Throughput: Data Rate Tanpa Kompresi = Resolusi × Tingkat Frame × Bit Depth / 8 (contohnya, 1080p pada 30 FPS = 1920×1080×30×24 / 8 = ~1,4 GB/s).
Evaluasi Batasan Perangkat Keras: Pastikan kekuatan pemrosesan CPU/GPU ≥ throughput data total × faktor overhead pemrosesan (2–5× untuk tugas kompleks).
Uji dengan Prototipe: Gunakan alat benchmark (misalnya, Intel VTune, NVIDIA Nsight) untuk mengukur penggunaan sumber daya untuk satu kamera, lalu skala secara linear (dengan penyesuaian untuk keuntungan/kerugian paralelasi).
Kesimpulan
Jumlah kamera yang dapat didukung oleh sebuah host dalam sistem visi bukanlah angka tetap, tetapi merupakan keseimbangan antara kemampuan perangkat keras, spesifikasi kamera, optimasi perangkat lunak, dan kompleksitas tugas. Untuk sebagian besar sistem, memulai dengan prototipe dan secara bertahap meningkatkan skalanya sambil memantau penggunaan sumber daya adalah pendekatan yang paling andal. Seiring perkembangan perangkat keras (misalnya, GPU yang lebih cepat, akselerator AI) dan perangkat lunak (misalnya, kerangka komputasi edge) dengan kecepatan tinggi, kapasitas untuk mendukung lebih banyak kamera dengan performa lebih tinggi akan terus berkembang. Evolusi ini akan memungkinkan pengembangan solusi visi yang lebih canggih dan dapat diskalakan, membuka peluang baru di berbagai industri, dari kesehatan dan transportasi hingga keamanan dan hiburan.
Artikel ini memberikan pemahaman dasar bagi arsitek sistem dan insinyur, menekankan perlunya pengujian dan optimasi yang disesuaikan untuk memenuhi permintaan aplikasi tertentu. Dengan mempertimbangkan semua faktor yang terlibat, dimungkinkan untuk merancang sistem visi yang efisien dan mampu menangani permintaan modern yang terus meningkat.





