

Deteksi Kontur Visi Mesin
Di era Industri 4.0 dan otomasi cerdas, visi mesin telah menjadi teknologi inti yang memungkinkan mesin "melihat" dan menginterpretasikan data visual dengan ketelitian yang seringkali melampaui kemampuan manusia. Dari berbagai fungsi utamanya, deteksi kontur memegang peran kritis: teknologi ini mengekstrak bentuk batas objek dari citra digital, menjadi dasar bagi berbagai tugas seperti pengenalan objek, pengukuran dimensi, inspeksi cacat, serta manipulasi robotik.
1. Apa Itu Deteksi Kontur?
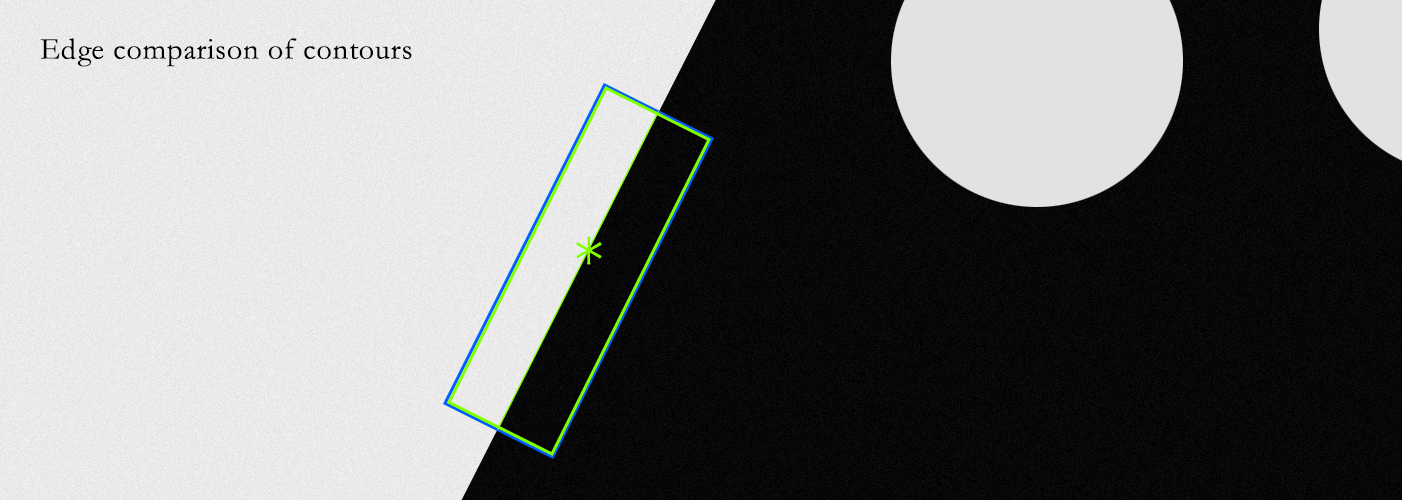
Sebuah "kontur" dalam pengolahan citra adalah kurva yang menghubungkan titik-titik berkelanjutan (sepanjang batas objek) dengan intensitas atau warna yang sama, memisahkan objek dari latar belakangnya. Berbeda dengan tepi diskret (transisi terang-gelap pada tingkat piksel), kontur merupakan loop kontinu (atau kurva terbuka untuk objek sebagian) yang merepresentasikan sebuah objek, bukan hanya perubahan intensitas terpisah-pisah. bentuk , bukan hanya perubahan intensitas terpisah-pisah.
Tujuan utama deteksi kontur adalah menyederhanakan data citra: mengurangi citra 2D menjadi garis-garis kontur 1D memungkinkan mesin menganalisis geometri objek (ukuran, sudut, simetri) secara efisien, tanpa memproses setiap piksel—penting untuk aplikasi real-time di mana kecepatan dan akurasi sama-sama krusial.
2. Prinsip Utama
Deteksi kontur didasarkan pada dua langkah utama: pra-pemrosesan (meningkatkan kontras objek-terhadap latar belakang) dan ekstraksi kontur (mengidentifikasi titik-titik batas). Kedua langkah ini mengatasi kekurangan citra mentah seperti noise, pencahayaan tidak merata, atau kontras rendah yang menyamarkan batas-batas objek.
2.1 Pra-Pemrosesan
Gambar mentah jarang memiliki batas yang jelas, sehingga praproses sangatlah penting:
Konversi ke Grayscale : Sebagian besar algoritma menggunakan gambar grayscale satu saluran (menyederhanakan data dari tiga saluran RGB menjadi satu, karena warna sering kali tidak relevan).
Pengurangan kebisingan : Gaussian blurring meratakan gambar dengan kernel Gaussian, mengurangi derau frekuensi tinggi sambil mempertahankan perubahan intensitas utama—penting untuk menghindari tepi palsu akibat gangguan sensor atau fluktuasi pencahayaan.
Deteksi tepi : Mengidentifikasi perubahan intensitas piksel per piksel (tepi) yang membentuk kontur. The Canny Edge Detector (metode multistage: perataan, perhitungan gradien, supresi non-maksimum, thresholding histeresis) adalah standar baku, menghasilkan tepi yang tipis dan kontinu. Operator Sobel, yang menyoroti tepi horizontal/vertikal, cocok digunakan untuk batas yang tebal.
Thresholding : Mengubah peta tepi grayscale menjadi gambar biner (hitam/putih), dengan foreground (tepi objek) bernilai 1 dan background bernilai 0—menyederhanakan pelacakan kontur.
2.2 Ekstraksi Kontur
Setelah pra-pemrosesan, algoritma melacak piksel latar depan yang terhubung untuk membentuk kontur. Peraturan Kode Rantai Freeman digunakan secara luas: ini mewakili kontur sebagai kode arah (ke atas, ke bawah, kiri, kanan) relatif terhadap piksel sebelumnya, mengurangi penyimpanan dan memungkinkan perbandingan bentuk yang mudah. Perpustakaan seperti OpenCV menyederhanakan ini dengan fungsi seperti findContours ((), yang mengembalikan koordinat piksel kontur dan memungkinkan penyaringan (dengan luas atau rasio aspek) untuk menghilangkan kebisingan.

3. Teknik Lanjutan
Metode tradisional bekerja untuk lingkungan yang dikontrol, kontras tinggi, tetapi skenario dunia nyata (pencahayaan yang tidak merata, objek yang tumpang tindih) membutuhkan pendekatan canggih:
Batas Pengaturan : Menghitung ambang batas lokal untuk setiap piksel (versus ambang batas global tunggal), ideal untuk gambar dengan pencahayaan yang bervariasi (misalnya, bagian industri di bawah lampu pabrik).
Deteksi Berdasarkan Deep Learning : Jaringan Neural Konvolutional (CNN) mengekstrak batas langsung dari gambar mentah, melewatkan pra-pemrosesan manual. Model seperti HED (Holistically-Nested Edge Detector) dan RCF (Richer Convolutional Features) menggabungkan fitur CNN skala ganda untuk peta tepi beresolusi tinggi, unggul dalam adegan kompleks (citra medis, lingkungan yang penuh sesak).
4. Tantangan Utama
Meskipun telah ada kemajuan, tantangan dunia nyata tetap ada:
Gangguan dan Pencahayaan : Lantai pabrik, cahaya redup, atau kondisi luar ruangan menyebabkan kontur terputus/palsu.
Objek Tumpang Tindih/Tertutup : Bagian yang bertumpuk menyatukan kontur, membuat bentuk individu sulit dibedakan.
Bahan Transparan/Pemantul : Kaca atau logam menyebarkan cahaya, menciptakan tepi yang lemah/terdistorsi.
Kinerja Real-Time : Tugas industri (inspeksi lini perakitan) membutuhkan 30+ frame per detik (FPS). Model deep learning memerlukan optimasi (kuantisasi, akselerasi GPU) untuk memenuhi tuntutan kecepatan.
5. Aplikasi Dunia Nyata
Deteksi kontur mendorong otomatisasi di berbagai industri:
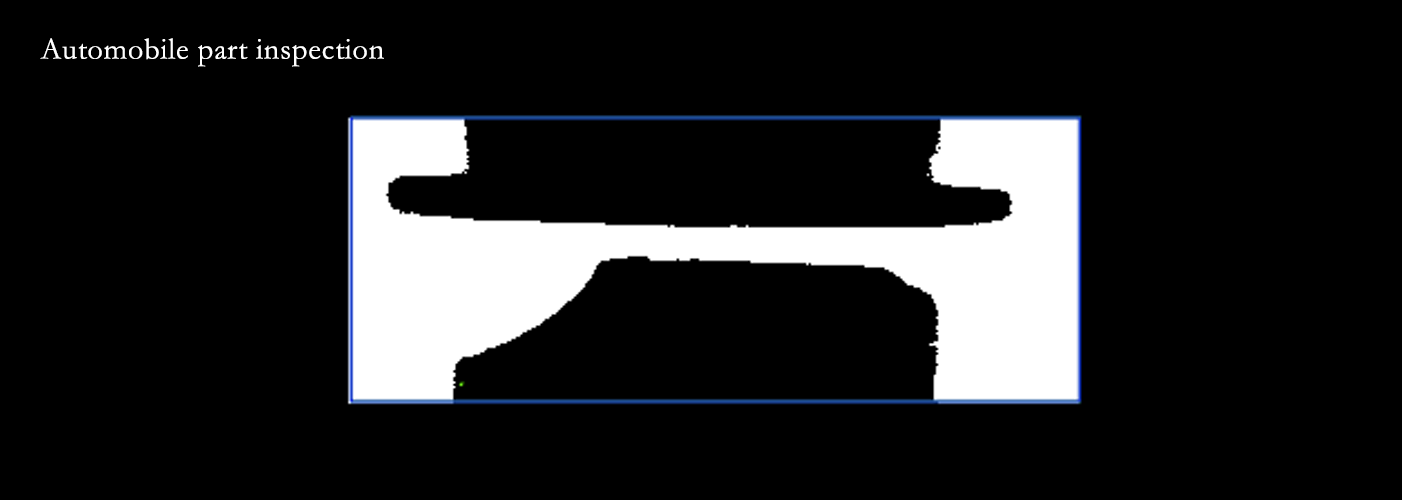
Inspeksi kualitas industri : Memeriksa adanya cacat (retak, penyok) dalam manufaktur. Contohnya, produksi otomotif memverifikasi komponen mesin (roda gigi, gasket) sesuai dengan kontur desain, menolak bagian yang tidak sesuai toleransi.
Penanganan Robot dengan Pengambilan dan Penempatan : Membantu robot menemukan objek. Di gudang, lengan robot menggunakan kontur untuk menemukan paket di atas conveyor, menghitung pusat/orientasi, dan menyesuaikan cengkeraman.
Pencitraan medis : Memisahkan struktur anatomi (tumor dalam scan CT, batas sel dalam slide histologi) untuk membantu diagnosis. Model deep learning mampu menangani jaringan biologis yang bervariasi dengan baik.
Pertanian : Mengklasifikasikan buah-buahan (apel, jeruk) berdasarkan ukuran/kematangan melalui analisis kontur serta mendeteksi penyakit tanaman dari perubahan kontur daun.
Pemantauan Lalu Lintas : Melacak kendaraan, mengukur aliran, atau mengidentifikasi kecelakaan (melalui kontur tidak biasa atau objek diam) menggunakan kamera pengawas.
6. Tren Masa Depan
Tiga tren yang akan membentuk deteksi kontur:
Integrasi Edge AI : Model ringan (CNN terkuantisasi) di perangkat edge (kamera industri, drone) memungkinkan pemrosesan waktu nyata tanpa ketergantungan pada cloud—penting untuk robot otonom.
Fusi Multi-Modal : Menggabungkan data visual dengan LiDAR/termal imaging meningkatkan deteksi dalam kondisi sulit (misalnya, imaging termal meningkatkan batas pada cahaya rendah; LiDAR menambahkan kedalaman 3D untuk objek yang tumpang tindih).
AI yang Dapat Dijelaskan (XAI) : Teknik XAI akan menjelaskan bagaimana model deep learning mendeteksi kontur, membangun kepercayaan dalam bidang kritis (diagnosis medis, inspeksi kedirgantaraan).
Kesimpulan
Deteksi kontur visi mesin menghubungkan data gambar mentah ke wawasan yang dapat ditindaklanjuti, memberdayakan otomasi dan kontrol kualitas. Dari deteksi tepi tradisional hingga deep learning, teknologi ini telah berevolusi untuk mengatasi tantangan yang kompleks. Seiring kemajuan teknologi, teknologi ini akan tetap menjadi pusat sistem cerdas, menjadikan mesin lebih mampu dan andal di berbagai industri.





