

Penerapan Kamera Visi Mesin dalam Proyek Pengenalan Pelat Nomor
Kamera visi mesin merupakan inti dari sistem LPR, yang menentukan akurasi dengan menangkap gambar pelat nomor berkualitas tinggi. Artikel ini secara ringkas membahas pemilihan kamera tersebut, koordinasi perangkat lunak, serta optimalisasi praktis untuk proyek LPR.
1. Pemilihan Kamera: Fondasi Sistem LPR
Kamera visi mesin khusus LPR memerlukan kemampuan pengambilan gambar definisi tinggi dan adaptabilitas lingkungan yang kuat. Kriteria utamanya meliputi resolusi (2 megapiksel untuk jarak dekat, 4–5 megapiksel untuk jarak jauh), laju frame (15–30 FPS untuk kecepatan rendah, 30–60 FPS untuk kecepatan tinggi), serta kinerja cahaya (sensitivitas ≤0,01 lux, WDR ≥120 dB, serta penerangan inframerah terintegrasi).
Lensa harus disesuaikan dengan jarak pengambilan gambar (8–12 mm untuk jarak dekat, 12–25 mm untuk jarak jauh, lensa zoom untuk skenario variabel) dengan sudut antara kamera dan kendaraan ≤30°. Antarmuka seperti Gigabit Ethernet (untuk jarak jauh) dan USB 3.0 (untuk skala kecil), serta dukungan GenICam, menyederhanakan integrasi sistem.
2. Koordinasi Perangkat Lunak: Mewujudkan Pengenalan Cerdas
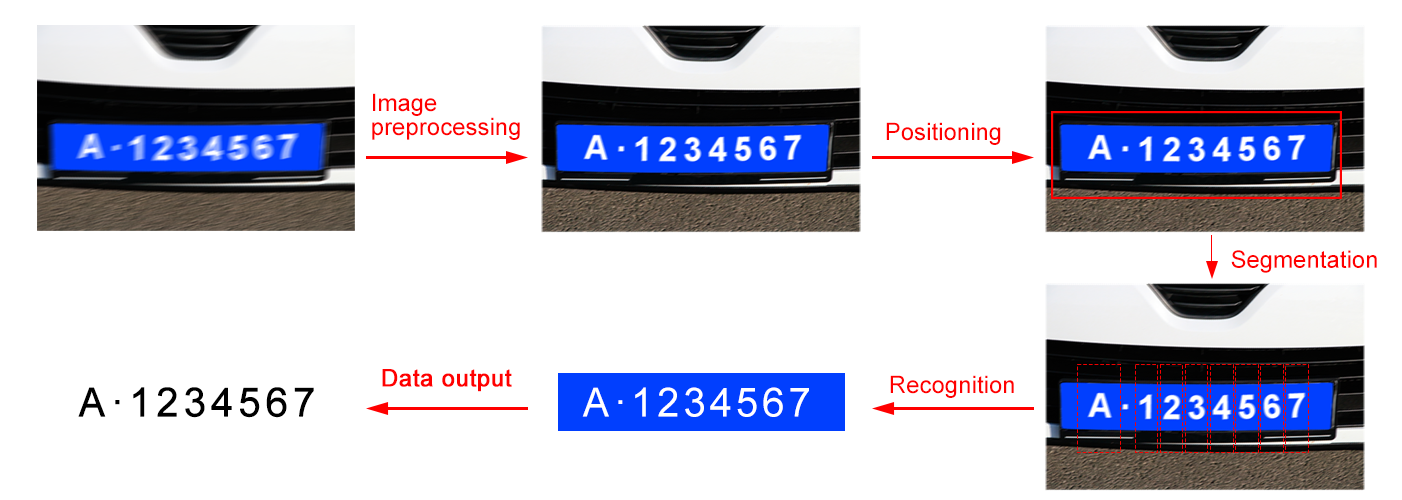
Kamera visi mesin menyediakan data gambar, dan perangkat lunak pengenalan plat nomor (LPR) membentuk lingkaran tertutup melalui pra-pemrosesan (mengoptimalkan kualitas gambar), penentuan posisi (menemukan lokasi plat nomor), segmentasi (memisahkan karakter), pengenalan (mengonversi gambar menjadi teks), serta keluaran data.
Kinerja perangkat lunak sangat terkait dengan kualitas kamera: gambar kamera yang lebih jernih mengurangi kesulitan pra-pemrosesan dan meningkatkan akurasi pengenalan, sedangkan laju bingkai (frame rate) kamera yang tinggi memungkinkan perbandingan multi-bingkai guna menghasilkan output yang lebih stabil, serta terintegrasi dengan sistem tingkat atas untuk penerapan praktis.
3. kesimpulan
Secara keseluruhan, kamera visi mesin merupakan kunci bagi operasi proyek LPR yang stabil dan efisien, di mana pemilihan kamera (dengan fokus pada resolusi, kecepatan bingkai, kinerja pencahayaan, lensa, serta antarmuka) dan koordinasi perangkat lunak saling memperkuat. Mengenai harga, harga ini bervariasi tergantung spesifikasi kamera—model dasar beresolusi 2 megapiksel bersifat hemat biaya untuk tempat parkir kecil, sedangkan kamera berperforma tinggi beresolusi 4–5 megapiksel dengan fungsi canggih lebih cocok untuk skenario berkebutuhan tinggi seperti jalan tol, dengan menyeimbangkan biaya dan kebutuhan proyek guna mencapai hasil penerapan LPR yang optimal.





