Decodificare la Visione delle Telecamere Industriali: Un'Analisi Approfondita dei Principi di Ispezione
Le telecamere industriali sono gli 'occhi' della visione artificiale e comprenderne i principi fondamentali è essenziale per ottimizzare le prestazioni. Questo articolo illustra la tecnologia alla base della visione delle telecamere industriali, aiutando ingegneri e appassionati a comprendere il funzionamento interno e a perfezionare i propri sistemi per il successo.
1. I Componenti Principali di una Telecamera Industriale
Prima di addentrarci nei principi, comprendiamo i blocchi fondamentali:
Sistema ottico: La lente è il cuore raccoglitore di luce. È fondamentale scegliere una lente che corrisponda al campo visivo, alla profondità di campo e alla risoluzione dell'applicazione. Ad esempio, una telecamera da 5 megapixel richiede una lente in grado di risolvere dettagli fini fino alla dimensione del singolo pixel.
Sensore: Il sensore CMOS o CCD converte la luce in segnali elettrici. Metriche principali include Efficienza Quantica (QE) , che idealmente dovrebbe essere superiore al 60% per una conversione ottimale della luce, e Gamma dinamica , che dovrebbe superare i 70 dB per gestire un ampio intervallo di intensità luminosa.
Processore d'immagine: Questo componente gestisce attività come Interpolazione di Bayer , riduzione del rumore , e correzione del colore , utilizzando algoritmi come una matrice 3x3 per bilanciare i livelli del bianco.

2. Principi Fondamentali della Visione Industriale delle Telecamere
Una volta acquisita l'immagine, entrano in gioco questi avanzati principi per estrarre dati significativi:
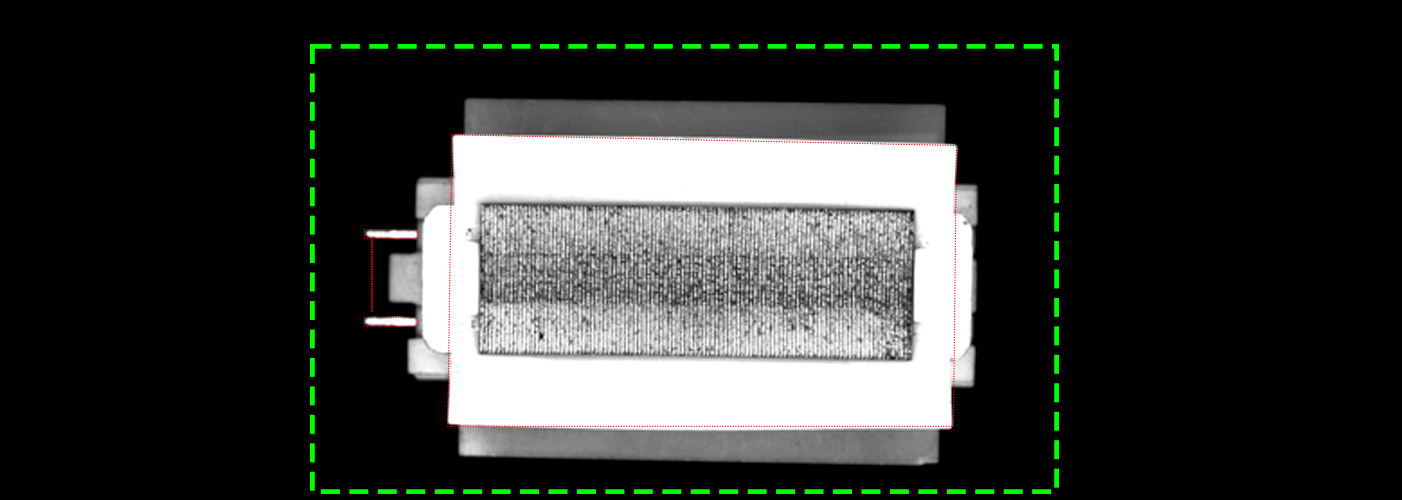
Estrazione delle Caratteristiche: Algoritmi come l'operatore Canny per rilevamento dei bordi o Correlazione Incrociata Normalizzata (NCC) per il template matching vengono utilizzati per localizzare target specifici con precisione sub-pixel, raggiungendo spesso un'accuratezza di 0,1px.
Correzione della Distorsione: Per garantire l'accuratezza delle misurazioni, la distorsione viene corretta utilizzando metodi di calibrazione. Questo calcola i coefficienti di distorsione radiale e tangenziale (k1,k2,p1,p2) per mantenere gli errori di misurazione entro ±0,05mm.
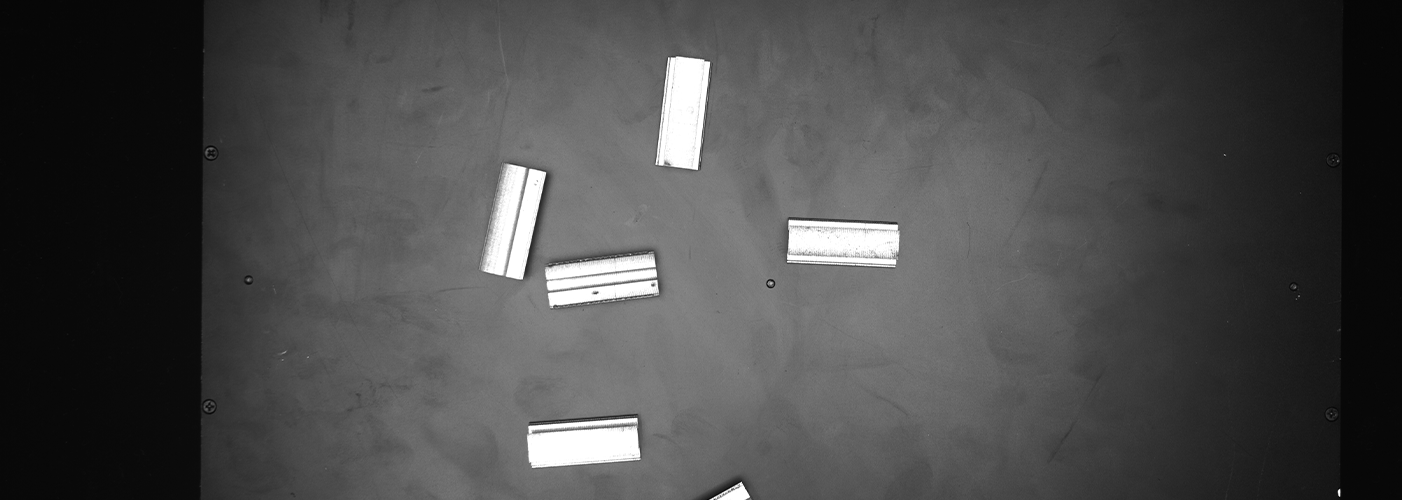
Compensazione del Movimento: Per oggetti in movimento, è essenziale prevenire il blur. Questo si ottiene regolando il tempo di esposizione in base alla velocità dell'oggetto (ad esempio, un tempo di esposizione di ≤500μs per un oggetto che si muove a 1m/s) e utilizzando uno shutter globale.
3. Applicazioni Pratiche dei Sistemi di Telecamere Industriali
Questi principi vengono applicati in vari settori industriali:
Misurazione Dimensionale: Calibrando i pixel su una scala reale (ad esempio, 1px = 0,02 mm), questi sistemi possono effettuare misurazioni estremamente precise con una ripetibilità di ±1 μm.
Rilevamento Difetti: Utilizzando modelli di deep learning come ResNet18 , le telecamere industriali possono classificare graffi superficiali e altri difetti con un'accuratezza superiore al 99,5%.
Guida Robotica: Attraverso una calibrazione multipla, questi sistemi possono guidare i robot traducendo le coordinate della telecamera nel sistema di coordinate del robot con un errore minimo, spesso inferiore allo 0,1°.