

3Dビジョンの4つの一般的なタイプ
3Dビジョン技術が進化を続ける中、さまざまなソリューションが産業および商業の異なるニーズに対応するために登場しています。この記事では、HIFLYが4つの主要な3Dイメージング技術を探り、その動作原理、利点、制限、および典型的な適用シナリオを分析します。
1. 両眼カメラ
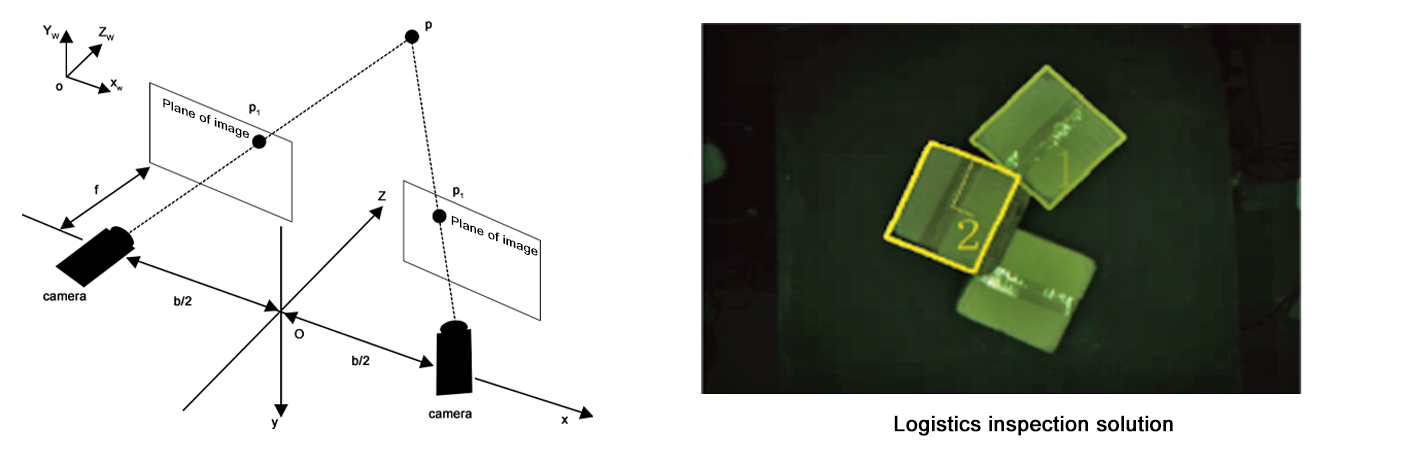
人間の両眼視覚に似た仕組みで、ステレオビジョンシステムは、微妙に異なる角度から画像をキャプチャするための2つのカメラを使用します。2枚の画像間でのピクセルのずれ(ディスパリティ)を計算することで、システムは奥行き情報を推定し、3Dモデルを再構築することができます。
利点:
低コストのハードウェア構成
シンプルなシステム構造
簡単な実装と操作
制限:
精度が限定的(通常ミリメートルレベル)
高精度を要求する産業用アプリケーションには不十分
応用分野: 基本的な物体認識、自律車両のナビゲーション、および消費者向けの深度センシング。
2. レーザーラインプロファイラー
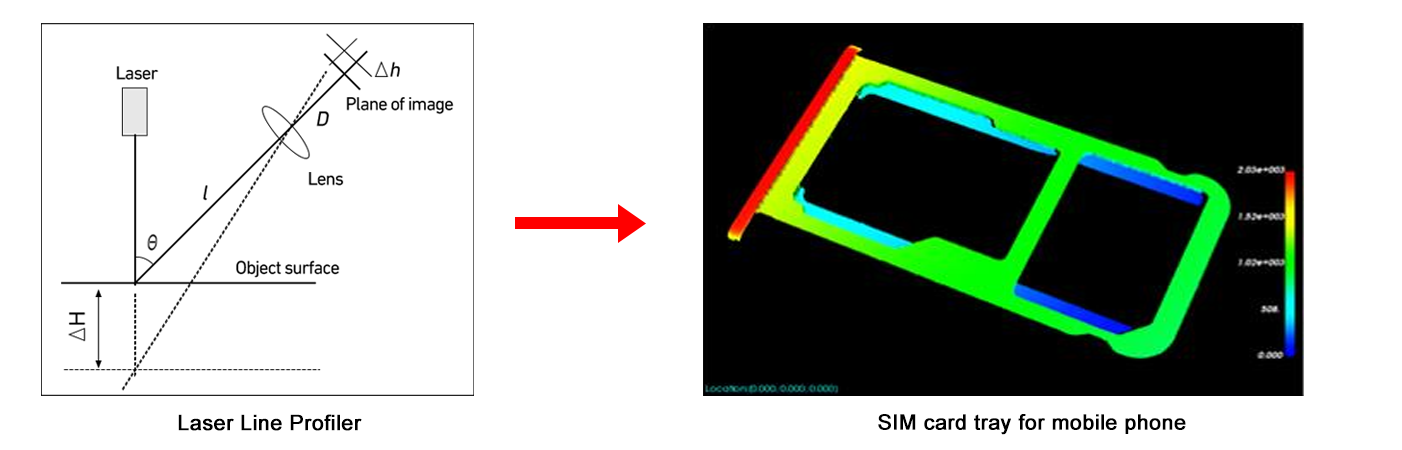
このシステムは、固定された角度で配置されたカメラとレーザーラインプロジェクターを組み合わせています。レーザーストライプが移動する物体を走査すると、カメラは投影されたラインの変形を捉え、3Dポイントクラウドを生成します。
利点:
Z軸方向に優れた精度(サブミクロンレベル)
XY軸の精度は数十ミクロン以内
平面度/高精度な高さ測定に最適
制限:
調整された機械的動作が必要
反射面があるとパフォーマンスが低下します
産業界での優位性: 現在、製造における品質検査と寸法確認のための最も広く採用されている3Dビジョンソリューションです。
3. 構造光3Dカメラ
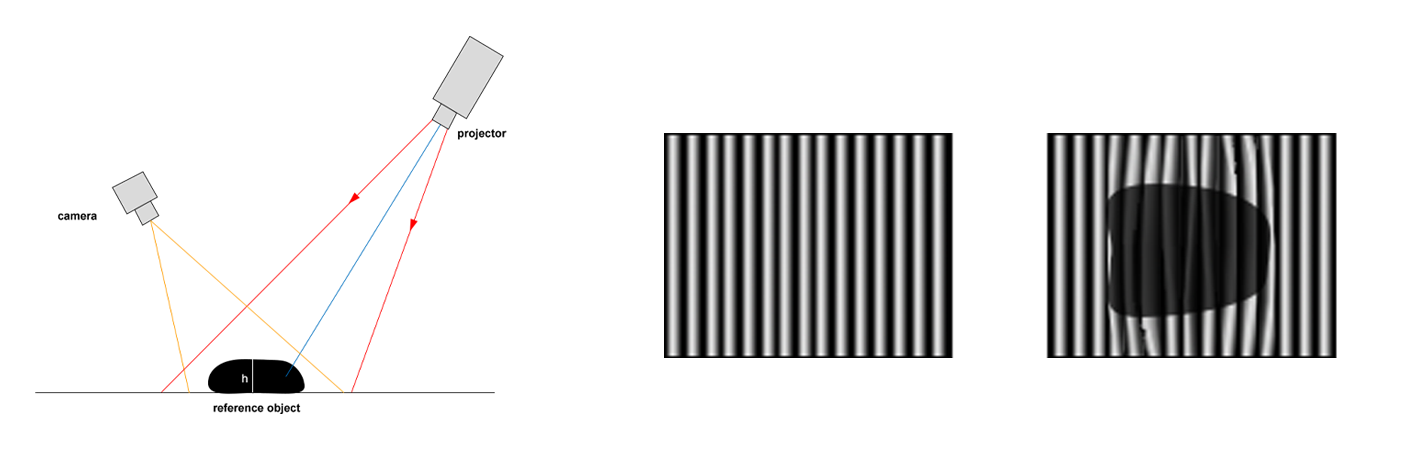
この技術は、エンコードされた光パターン(グリッドやスポット)をターゲットに投影します。その後、1つまたは複数のカメラが物体表面によって引き起こされた歪んだパターンを分析し、3D座標を計算します。
利点:
接触のない測定
静止した状態でのスキャン能力
小さな視野におけるマイクロレベルの精度
大規模アプリケーションで効果的
制限:
設備コストが高額
周囲の光干渉に敏感
プライムアプリケーション: 3Dランダムグリッピング
4. Time-of-Flight (ToF) レーザースキャナー
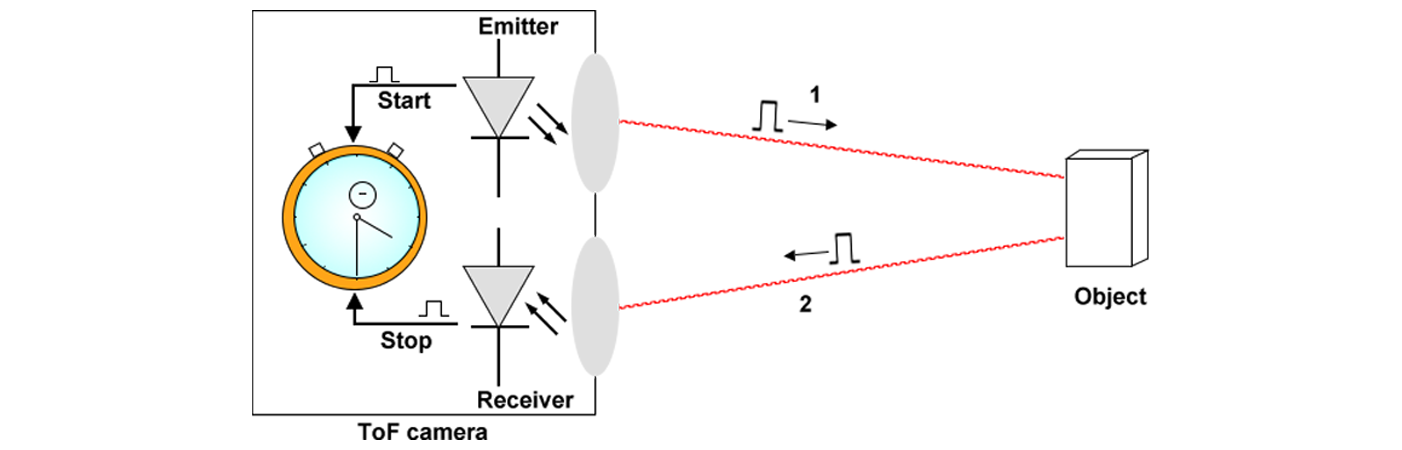
ToFシステムは、赤外線レーザーパルスの往復時間を測定して距離を計算します。この直接的な飛行時間測定により、リアルタイムの3Dマッピングが可能になります。
利点:
優れたリアルタイム性能
全域深度取得
コンパクトなシステムサイズ
制限:
測定精度に制限あり
多重経路干渉に影響されやすい
商業的な普及度: 幅広く消費者向け電子機器(VR/AR)、セキュリティシステム、および医療画像に使用されています。産業分野での応用は主にAGVの障害物回避と基本的なナビゲーションに限定されます。
技術比較と選択ガイド
各技術は特定のシナリオで優れています:
コストに敏感なアプリケーション: ステレオビジョン
超精密が必要な要件: レーザーラインプロファイリング
複雑な表面スキャン: 構造化光
リアルタイム動的センシング: ToFシステム





