

機械ビジョンプロジェクトの製品選定プロセス
包括的なビジョンプロジェクトの選定プロセスにはどのようなステップが含まれるかご存知ですか? 本日は、マシンビジョンプロジェクトのためのコンポーネント選定方法について探っていきましょう。
- 顧客の要件を取得する
検出サンプルを受け取ったとき、最初に何をすべきでしょうか? もちろん、それは顧客との要件に関するコミュニケーションです。プロジェクトは、できる限り顧客のニーズに応えるよう努めるべきです。コミュニケーションを通じて具体的な検出要件を理解することで、対象物が静的か動的かに基づいて最初の選択を行い、これにより産業用カメラのグローバルシャッターやローリングシャッターを選定します。動的物体を撮影する場合、グローバルシャッターが必要です。
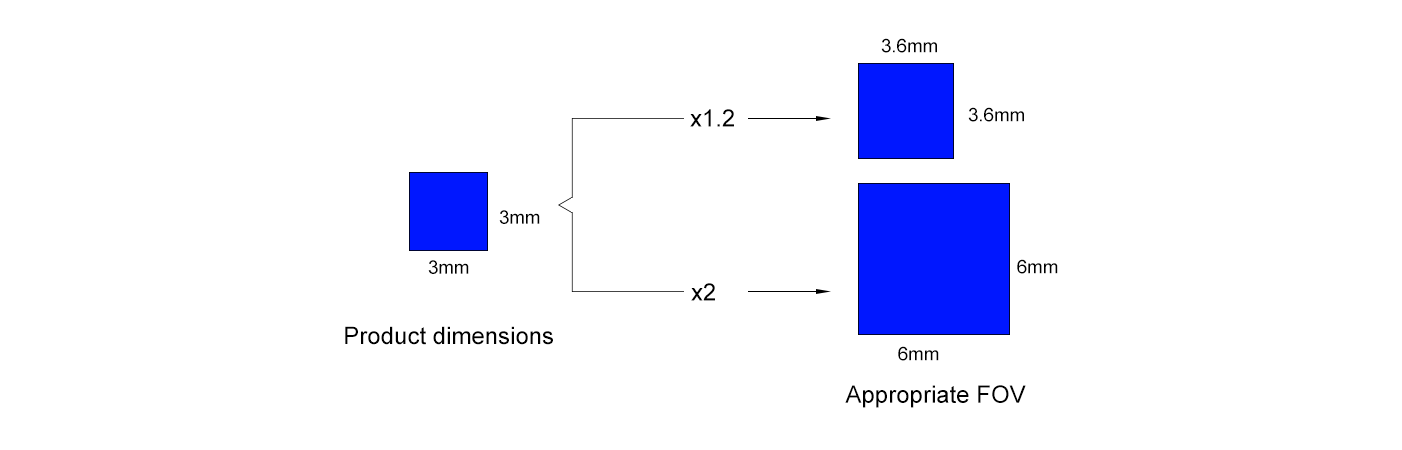
- 視野範囲を決定する 主 (FOV)
次に、製品の寸法に基づいて適切なFOVサイズを決定する必要があります。画像の場合、カメラの撮影FOVは通常、製品サイズの1.2倍から2倍が最も適しています。
- 適合するものを選択 工業用 レンズ
工業用カメラのレンズにはテレセントリックレンズとFA(ファクトリーオートメーション)レンズがあり、異なるレンズのFOVの計算方法は異なりますので、具体的な状況を分析する必要があります。しかし、FOVの計算はセンサーサイズから切り離せないため、まずセンサーの寸法を計算する必要があります。

センサーサイズは、解像度にピクセルサイズを掛け算して計算されます。1.3メガピクセルの工業用カメラを例に取ります:
•センサー幅 = 1280 × 4.8 μm = 6.144 mm
• センサ高さ = 1024 × 4.8 μm = 4.915 mm
テレセントリックレンズでは、画角(FOV)はセンササイズをレンズ倍率で割ったものとして計算されます。同じカメラに0.5×のテレセントリックレンズを使用した場合:
• 画像幅 = 6.144 mm ÷ 0.5 = 12.288 mm
• 画像高さ = 4.915 mm ÷ 0.5 = 9.83 mm
産業用FAレンズでは、画角(FOV)の計算はセンササイズ × 働き距離 ÷ 焦点距離となります。同じカメラに働き距離100 mm、焦点距離8 mmの場合:
• 水平幅 = 6.144 mm × 100 ÷ 8 = 76.8 mm
• 水平高さ = 4.915 mm × 100 ÷ 8 = 61.4 mm
これらのすべての計算は、FOVと必要な精度に基づいて適切なカメラとレンズを選択することを目的としています。したがって、次のステップはカメラの精度を計算することです。
- 計算する 産業 カメラ精度
テレセントリックレンズの場合、カメラの理論的な精度はピクセルサイズをテレセントリックレンズの倍率で割った値に等しくなります。先ほどの例(0.5倍のテレセントリックレンズ)を続けます:
• 理論的精度 = 4.8 μm ÷ 0.5 = 9.6 μm
産業用FAレンズでは、理論的な精度はFOVを解像度で割った値として計算されます。FOVが72 mmの場合:
• 理論的精度 = 72 mm ÷ 1280 = 0.056 mm
以上は理論上の精度であり、理論と実際にはしばしば大きな違いがあります。そのため、実際の精度にはさらなる計算が必要です。例えば:
前面照明を使用すると、実際の精度は理論的な精度の3倍から5倍になります。
機械視覚のバックライト照明では、実際の精度が理論的な精度の1倍から2倍に達することができます。

アルゴリズムがサブピクセル補間できる場合、より高い精度が得られます。
皆さんが知っている通り、視覚検査において照明は不可欠です。良い照明は視覚プロジェクトの成功の半分を占めます。したがって、適切なサイズの光源を選んで照明テストを行う必要があります。例えば:
機械視覚用のリングライト、表面ライト、またはボウルライトの場合、光源のサイズは通常FOVよりも10%から20%大きくします。
マシンビジョン用のバー光源においては、光源の長さは一般にFOVよりも20%から30%長くなります。
以上がマシンビジョンプロジェクトにおける部品選定の完全なプロセスです。これらのステップに従うことで、プロジェクトに必要な製品を迅速に決定できます。または、メッセージを送信いただければ、プロジェクトのニーズに最も適した製品を選定いたします。





