

機械視覚における一般的なフィード方法とは? 自動化のための初心者ガイド
自動化の世界では、機械ビジョンが究極のゲームチェンジャーであり、システムに「見る」能力を与え、ピンポイントの精度で判断を下させます。しかし、カメラが製品を検査する前に、それは適切に提示される必要があります。それが “フィーディング方法 ”入ってください。これらの技術は、部品や製品が機械視覚システムが魔法を発揮するための完璧な位置に配置されることを保証します。それは欠陥を見つけることでも、ロボットアームを誘導することでも、コンベヤベルトからロボットフィーダーまで、適切な方法が効率を左右します。
この投稿では、機械視覚における最も一般的なフィーディング方法を探り、その仕組みを解説し、どの方法があなたのニーズに合っているかを理解するお手伝いをします。自動化に初めて取り組む方でも、生産ラインを効率化したい方でも、機械視覚をスムーズに動作させるシステムについて詳しく見ていきましょう!
機械視覚におけるフィーディング方法とは何ですか?
フィーディング方法とは、部品、製品、または材料を検査や処理のために機械視覚システムに供給するための技術を指します。産業現場では、機械視覚カメラが明瞭で使用可能な画像を取得するために一貫性のある位置決めに依存しています。フィーディング方法は、ネジ、ボトル、回路基板など、アイテムが正しい方向に配置され、カメラが分析できる適切なタイミングで到着することを保証します。
これを食事のテーブルを準備するのに例えることができます:食べ物(あなたの製品)は、客人(視覚システム)がそれを楽しむために、ちょうど良い状態で置かれなければなりません。これを実現するために使われる最も一般的な方法を見てみましょう。
機械視覚における一般的なフィーディング方法
ここには、あらゆる産業で機械視覚アプリケーションを支える主要なフィーディング方法が挙げられます:
- コンベアベルトフィーディング
仕組みについて 製品がコンベアベルト沿いに移動し、一定の速度でカメラの下を通過します。ラインスキャンカメラと組み合わせられることが多く、連続動作に理想的です。
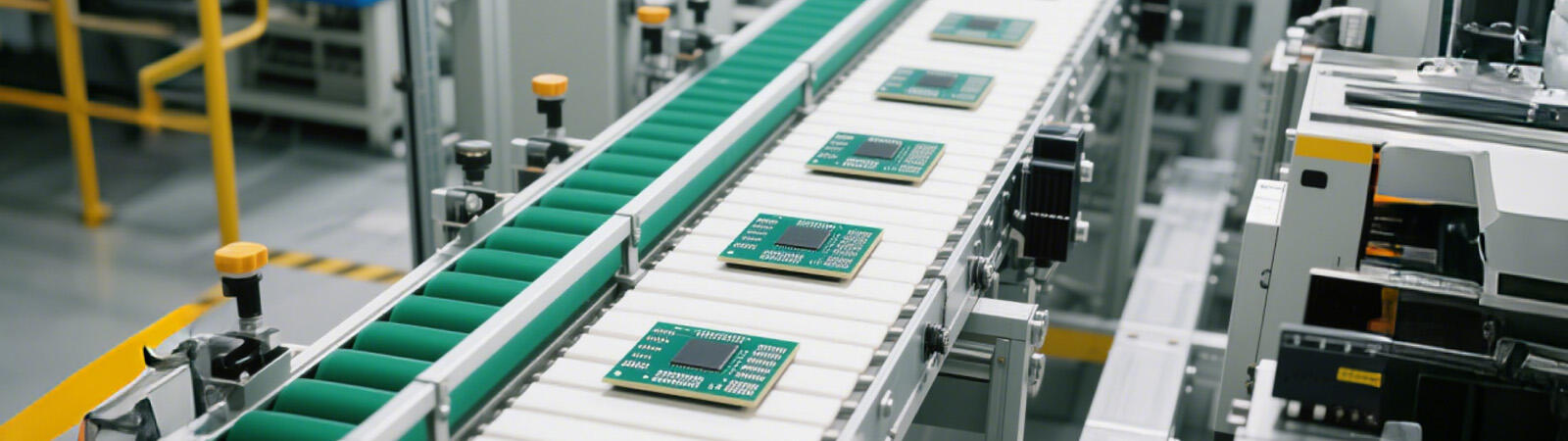
最適な用途: 食品包装の検査やボトルのラベルチェックなど、大量生産に適しています。
なぜ素晴らしいか: シンプルで拡張可能であり、減速することなく大量の処理に対応できます。エンコーダーがベルトの速度をカメラと同期させ、滑らかなイメージングを実現します。
考慮事項 重なりや見逃しを避けるためには、一定の速度と間隔が必要です。
2. 振動ボウルフィーダー
仕組みについて ネジやキャップのような小さな部品が、カスタムトラックを使用して整列される振動ボウルに供給されます。部品は一列になって出てきて、検査の準備が整います。

最適な用途: 電子機器や自動車組立などの業界で使用される小さな部品。
なぜ素晴らしいか: 手作業を減らすために部品を自動的にソートして整列します。高速かつ繰り返しのタスクにはコスト効果があります。
考慮事項 騒音が出ることがあり、繊細な部品は振動によって損傷する可能性があります。
3. ロボットによるピックアンドプレースフィーディング
仕組みについて ビジョンシステムによって誘導されるロボットアームが、部品をコンテナやトレイから取り出し、検査用のカメラの前に配置します。同じアームは、部品を次のステーションに移動することもあります。
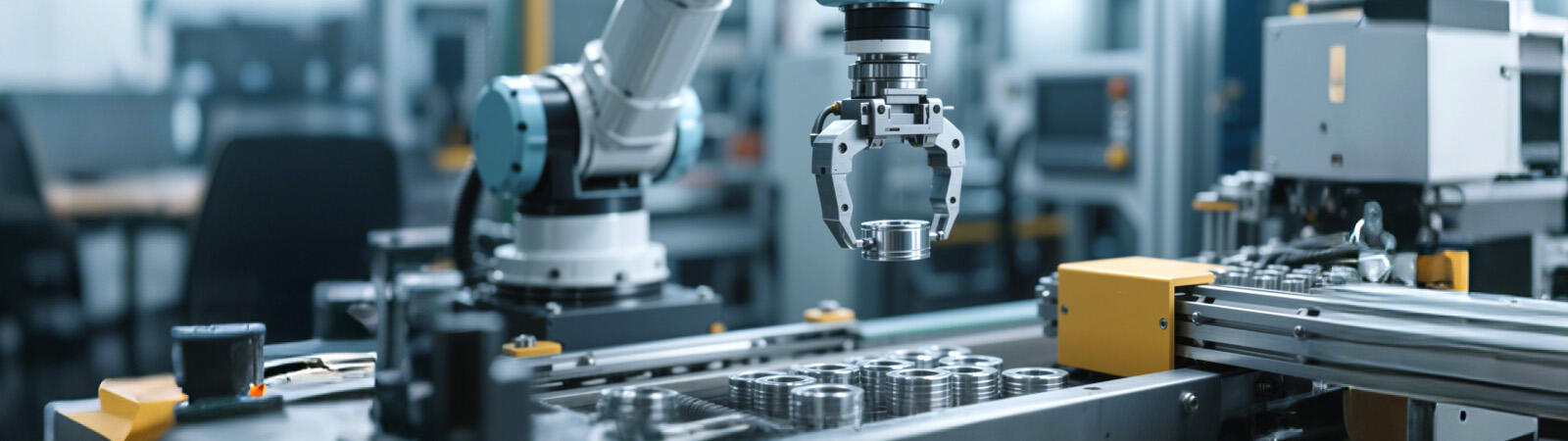
最適な用途: 家電製品の組立ラインなどで見られる複雑な形状やランダムに配置された部品。
なぜ素晴らしいか: さまざまな形状やサイズに対応できる柔軟性を提供します。ビジョンガイド付きロボットは、リアルタイムで状況の変化に適応します。
考慮事項 初期コストが高く、正確な動作のために精密なプログラミングが必要です。
4. 重力給餌
仕組みについて 部品が傾斜したトレイまたはレールを下滑り、カメラの近くを通るのを重力で誘導します。単純で均一なアイテムでよく使用されます。

最適な用途: プラスチックキャップや金属ピンなどの軽量で壊れにくい部品。
なぜ素晴らしいか: 摩耗する可動部品がないため、低コストかつ低メンテナンスです。
考慮事項 速度や方向に対する制御が限られており、繊細な物品には適していません。
5. トレイまたはパレット給餌
仕組みについて 部品はトレイまたはパレットに事前に配置され、カメラ(通常はエリアスキャンカメラ)が一度に複数のアイテムを検査するために位置に移動されます。

最適な用途: 医療機器や電子部品のトレイをチェックするバッチ検査など。
なぜ素晴らしいか: 一括して複数の部品を効率的に検査でき、位置が一貫しています。
考慮事項 コンベアなどの連続方法よりも遅く、トレイの再装填が必要です。
正しい給餌方法の選択
最適な給餌方法は、あなたの用途によります:
速度の必要性: コンベアベルトや振動式フィーダーは、高スループットラインに優れています。
部品の複雑さ: ロボットによるピックアンドプレースは、不規則または多様なアイテムを処理できます。
予算: 重力フィーダーやトレイシステムは、よりシンプルなタスク向けにコスト効果があります。
脆さ :繊細な部品には振動式フィーダーを使用せず、ロボットやトレイフィーダーを選択してください。
容量: 大量生産はコンベアに向いており、バッチプロセスはトレイに適しています。
特定の部品で異なる方法をテストすることで、最適な方法を見つけるのに役立ちます。
給餌方法が重要な理由
適切に選ばれた給餌方法は、単に作業を進めるだけでなく、作業全体を変革します:
効率を向上させる: 適切な部品の配置により、エラーと再スキャンが減少します。
精度を確保する: 一貫した位置決めにより、信頼性のある検査が可能になります。
時間を節約する 高速給紙により、品質を犠牲にすることなく生産性が向上します。
コストを削減する: 紙詰まりや誤給紙が少なくなるため、ダウンタイムと廃棄物が減少します。
要するに、適切な給紙方法こそが、機械視覚の真の力を引き出す無名の英雄です。
現実の例
食品産業: コンベアベルトが缶をカメラの前を通し、分速1,000個でへこみをチェックします。
電子機器: 振動ボウルが小さなネジを回路基板の組立に合わせて整列させ、完璧な配置を確保します。
自動車: ロボットアームがエンジン部品をピックアップして欠陥検査を行い、さまざまな形状に対応します。
各手法はタスクに合わせてカスタマイズされており、機械視覚には万能な方法がないことが証明されています。
給与システムを最適化するためのヒント
カメラとの同期: エンコーダーやセンサーを使用して、部品の到着をカメラのトリガーと同時に調整します。
照明テスト: 給餌方法に合わせて照明設定を最適化し、鮮明な画像を確保します。
詰まりを最小限に: フィーダーを設計して、部品のサイズと形状に対応し、詰まりがないようにします。
専門家と協力する: 機械視覚ベンダーと連携して、ラインに適した供給方法を選定します。
機械視覚における供給の未来
自動化が進化するにつれて、供給方法はより賢くなっています。AI搭載ロボットは現在、ランダムな部品の向きに適応でき、高度なセンサーはコンベア速度をリアルタイムで微調整します。その結果、明日の需要に応えるためのさらに高速で柔軟なシステムが実現しました。
機械ビジョンを効率化する準備はできましたか?
適切なフィーディング方法は、機械ビジョンシステムのフルポテンシャルを引き出し、効率と精度を高めます。ラインに最適なセットアップを見つけたいですか?私たちの機械ビジョンソリューションのラインナップをご覧になるか、カスタマイズされたコンサルテーションのために専門家と連絡を取りましょう。不良なフィーディングで遅れを取らないでください——今日、お問い合わせください。ビジョンシステムが最高のパフォーマンスを発揮できるようにしましょう!





