

なぜ機械視覚は高精度な寸法検査を達成するのが難しいのか?
産業自動化と品質管理の急速に進化する分野において、機械ビジョンはさまざまな検査タスクのために強力なツールとして登場しました。しかし、その多くの利点にもかかわらず、高精度な寸法検査を達成することは依然として大きな課題です。本記事では、機械ビジョンを通じて正確な寸法測定を達成することが難しい主な理由について詳しく説明します。
ハードウェアに関連する制約
マシンビジョンシステムのハードウェアコンポーネント、カメラやレンズなどは、精度に対して固有の制限を課します。低解像度のカメラは物体の細部を捉えられず、これにより寸法計算が不正確になります。高解像度カメラであっても、ピクセルサイズは重要な要因です。小さいピクセルは理論上より詳細な画像を提供できますが、ピクセルごとに捕捉される光の量が減少し、画像ノイズが増加します。このノイズは物体の輪郭を歪め、境界を正確に定義することが難しくなります。
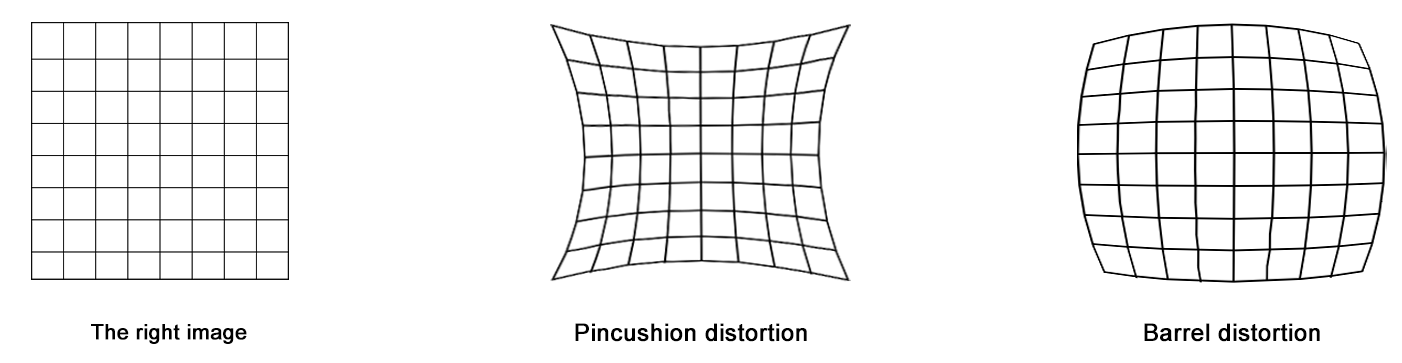
産業用レンズは、機械視覚の精度においても重要な役割を果たします。幾何学的歪み、例えばバレル歪みやピンクッション歪みは、レンズでよく見られるものです。これらの歪みにより、現実世界での直線が撮影された画像では曲線に見えるようになり、寸法測定の精度に大きな影響を与えることがあります。さらに、レンズには色収差が発生する可能性があり、異なる波長の光が異なる焦点に集まることで、物体の周囲に色のフレアが発生し、測定の精度がさらに低下します。これらのレンズの不完全さを修正するには複雑なキャリブレーションが必要であり、視野全体で完全な補正を達成するのは非常に困難です。
光学の物理的制限
光学の物理原則は、機械視覚における高精度な寸法検査に対して基本的な障壁を提示します。光の回折は大きな問題です。光学の法則によれば、光が小さな開口部を通ったり小さな物体の周りを通過すると、回折し、物体の画像の輪郭がぼやける原因となります。小さな部品を検査する場合、この回折効果により、密接した特徴を正確に区別することが不可能になり、寸法測定に誤差が生じることがあります。
別の光学的な制限として、浅い被写界深度があります。機械視覚において、もし対象物が複雑な三次元形状を持っていたり、カメラに対する物体の位置に変動がある場合、物体の一部がピント外れになることがあります。このピント外れによるぼかしは、物体の外観を歪め、寸法を正確に測定することが困難になります。被写界深度を調整することはしばしばトレードオフを伴います。被写界深度を広げると解像度が低下する可能性があり、逆に解像度を上げると被写界深度が狭くなる可能性があります。

環境干渉
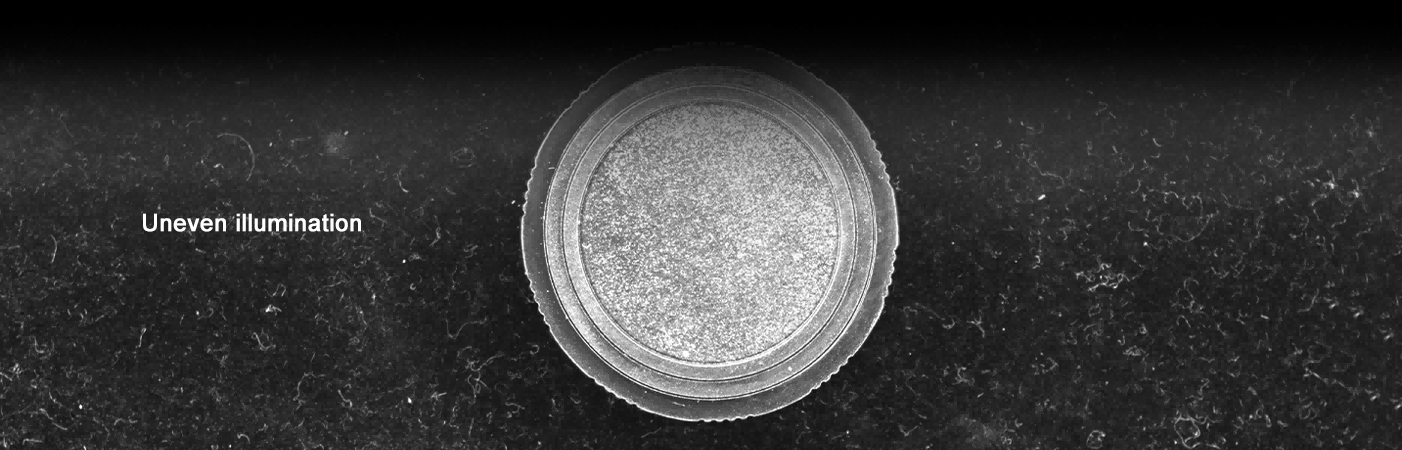
機械ビジョンシステムが動作する環境は、寸法検査の精度に大きな影響を与えることがあります。照明条件は非常に変動が大きく、重要です。照度、方向、色温度の変化により、画像内の物体の外観が変わることがあります。例えば、不均一な照明は物体に影を作り出し、それが物体の形状の一部と誤って解釈され、間違った寸法計算につながることがあります。また、物体の反射面は眩光を引き起こし、カメラセンサーが飽和して重要な特徴が隠れてしまう場合があります。
周囲の温度や湿度も機械ビジョンシステムの性能に影響を与えることがあります。温度の変化は、検査対象の物体やビジョンシステムのハードウェア部品の熱膨張や収縮を引き起こし、寸法に変化をもたらす可能性があります。湿度はレンズやその他の光学部品に結露を引き起こし、画像品質や測定精度を低下させることがあります。
物体の平坦性 - 引き起こされる課題
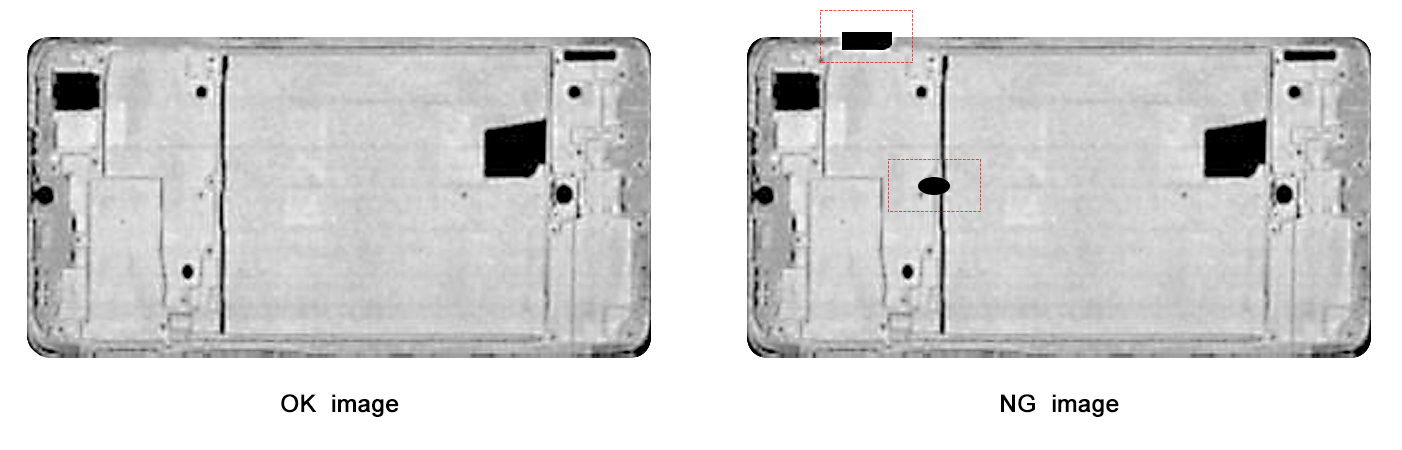
物体の平坦性は、しばしば見過ごされがちですが、機械ビジョンに基づく寸法検査の精度を妨げる重要な要因です。物体の表面が不均一である場合、光と物体の間の相互作用が予測不可能になります。盛り上がりやくぼみのある領域では、光の反射が予想されるパターンから外れます。平坦な方向にカメラに向かって光を反射させる代わりに、不均一な表面は光を散乱させ、物体の実際の形状に対応しない明るいスポットや影を作ります。これらの一貫性のない照明パターンは、エッジ検出アルゴリズムを誤導し、物体の境界を誤って識別させます。例えば、全体的に平坦な表面上の小さな突起が異なる特徴と誤認され、寸法測定が過大になることがあります。
さらに、構造化光投影やステレオマッチングなどの技術に依存する3D機械視覚システムでは、不均一な表面が奥行き認識の基本的なプロセスを妨げます。構造化光の場合、投影されたパターンが不規則な表面上で歪み、奥行き情報の正確なデコードが困難になります。ステレオビジョンでは、表面の平坦性の違いにより、2つのカメラビュー間での対応点のマッチングに誤差が生じることがあります。これは、不規則さが実際の距離を反映しない相違を引き起こすためです。その結果、物体の3D形状を高精度で再構築することが難しくなり、寸法検査の精度に直接影響します。
アルゴリズムおよびソフトウェアの制限
寸法検査に使用される機械視覚のアルゴリズムとソフトウェアには独自の課題があります。物体の寸法を決定するための基本的なステップであるエッジ検出は、しばしば複雑で誤りやすいものです。Canny、Sobel、Laplacianなどの異なるエッジ検出アルゴリズムにはそれぞれ強みと弱点があります。画像内のノイズは誤ったエッジを検出する原因となり、低コントラストの物体はエッジを見逃す結果につながることがあります。
さらに、検出されたエッジに幾何学モデルを正確に適合させて寸法を計算することは困難な作業です。物体は不規則な形状、表面の欠陥、またはテクスチャの変化があり、それによりアルゴリズムが混乱することがあります。加えて、複雑な三次元形状を持つ物体を処理するには高度な3D再構成アルゴリズムが必要ですが、これらは計算コストが高く、必要な精度に欠けることがよくあります。
結論として、高精度な寸法検査を機械視覚で達成する難しさは、ハードウェアの制限、光学的な制約、環境の干渉、物体の平坦性に関連する問題、そしてアルゴリズムとソフトウェアの課題の組み合わせに起因します。これらの障壁を克服するには、光学、電子工学、コンピュータサイエンス、材料科学などの複数分野での継続的な研究開発が必要です。これらの問題に対処することで、機械視覚システムの精度と信頼性を向上させ、現代の工業応用におけるますます厳格化する要件を満たすことができます。





