

머신 비전 윤곽선 검출
산업 4.0 및 스마트 자동화 시대에 머신 비전은 핵심 기술이 되었으며, 정밀도가 종종 인간의 능력을 초과하는 시각 데이터를 기계가 '보며' 해석할 수 있게 합니다. 그 주요 기능 중 윤곽선 감지 는 매우 중요합니다: 이는 디지털 이미지에서 객체 경계 형태를 추출하여 객체 인식, 치수 측정, 결함 검사 및 로봇 제어와 같은 작업의 기반이 됩니다.
1. 윤곽선 검출이란 무엇인가?
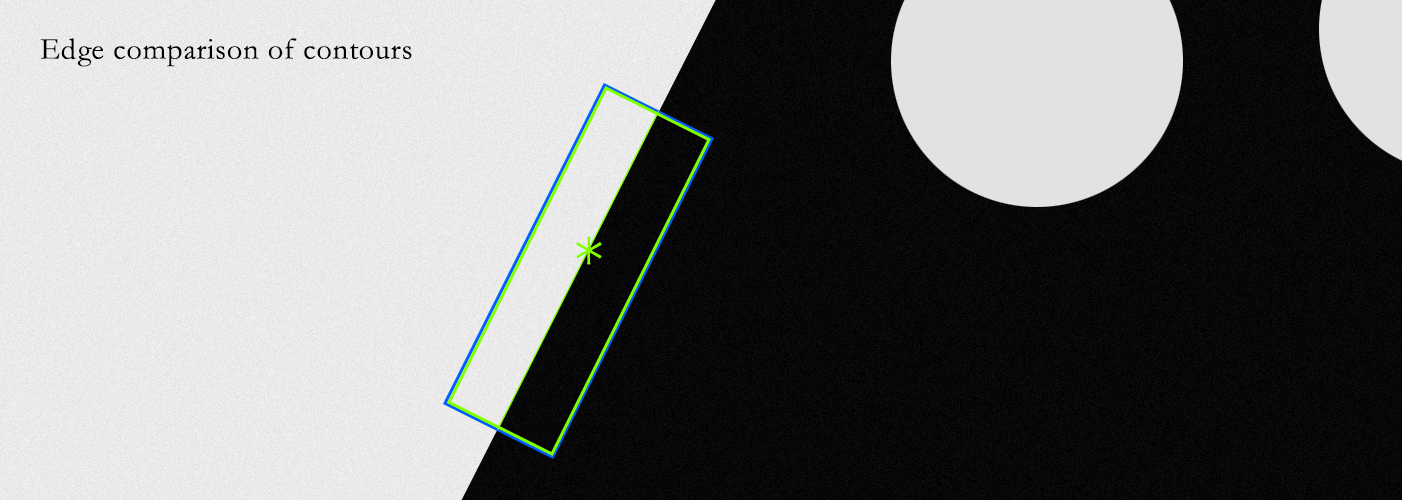
이미지 처리에서 "컨투어(contour)"는 동일한 강도 또는 색상을 갖는 연속적인 점들(객체의 경계를 따라 있는 점들)을 연결하는 곡선으로, 객체를 배경으로부터 분리합니다. 개별 엣지(픽셀 수준의 밝기-어두움 전환)와 달리, 컨투어는 객체의 모양 , 단순한 강도 변화가 아니라 연속적인 루프(또는 부분 객체의 경우 개방된 곡선)입니다.
컨투어 검출의 주요 목적은 이미지 데이터를 단순화하는 것입니다. 2차원 이미지를 1차원 컨투어 라인으로 축소하면 기계가 각 객체의 기하학적 특성(크기, 각도, 대칭성)을 모든 픽셀을 처리하지 않고도 효율적으로 분석할 수 있습니다. 이는 속도와 정확성이 모두 중요한 실시간 애플리케이션에서 필수적입니다.
2. 핵심 원리
컨투어 검출은 다음 두 가지 핵심 단계에 의존합니다: 전처리 (객체와 배경의 대비 향상) 및 컨투어 추출 (경계점 식별). 이러한 단계는 경계를 모호하게 만드는 노이즈, 불균일한 조명 또는 낮은 대비와 같은 원본 이미지의 결함을 해결합니다.
2.1 전처리
원본 이미지는 일반적으로 명확한 경계가 드문데, 이 때문에 전처리는 매우 중요합니다.
그레이스케일 변환 : 대부분의 알고리즘은 단일 채널 그레이스케일 이미지를 사용합니다(색상이 종종 관련이 없기 때문에, 세 개의 RGB 채널에서 하나의 채널로 데이터를 단순화함).
소음 감축 : 가우시안 블러링(Gaussian blurring)은 가우시안 커널(Gaussian kernel)을 사용하여 이미지를 부드럽게 만들며, 센서 간섭 또는 조명 변동으로 인한 잘못된 엣지(edge)를 방지하기 위해 고주파 노이즈를 제거하면서 주요 밝기 변화는 유지합니다.
에지 검출 : 윤곽선을 구성하는 픽셀 수준의 밝기 변화(엣지)를 식별합니다. 캐니 엣지 탐지기(Canny Edge Detector) (평활화, 그래디언트 계산, 비최대 억제, 히스테리시스 임계값 처리 등 여러 단계로 구성된 방법)는 얇고 연속적인 엣지를 생성하는 표준 방법입니다. 소벨 연산자(Sobel Operator)는 수평/수직 엣지를 강조하며, 두꺼운 경계에 적합합니다.
임계값 처리(Thresholding) : 그레이스케일 엣지 맵을 이진(흑백) 이미지로 변환하여 전경(객체 엣지)을 1, 배경을 0으로 설정합니다. 이는 윤곽 추적(contour tracing)을 단순화하기 위함입니다.
2.2 윤곽선 추출(Contour Extraction)
전처리 후, 알고리즘은 연결된 전경 픽셀을 추적하여 윤곽을 형성합니다. 이 과정에서 프리먼 체인 코드(Freeman Chain Code) 가 널리 사용됩니다. 이 코드는 이전 픽셀을 기준으로 방향 코드(up, down, left, right)로 윤곽을 표현하여 저장 공간을 절약하고 쉬운 형태 비교가 가능하게 합니다. OpenCV와 같은 라이브러리는 findContours() 같은 함수를 통해 윤곽 픽셀 좌표를 반환하며, 노이즈 제거를 위해 면적 또는 종횡비(aspect ratio)를 기준으로 필터링할 수 있습니다.

3. 고급 기술
전통적인 방법은 조절된 환경과 높은 대비가 있는 경우에 효과적이지만, 실제 상황(조명이 고르지 않은 경우, 겹쳐진 물체 등)에서는 보다 고급 접근법이 필요합니다.
적응형 이진화(Adaptive Thresholding) : 단일 전역 임계값이 아닌 각 픽셀에 대해 지역적 임계값을 계산합니다. 조명이 다양하게 변하는 이미지(예: 공장 조명 아래의 산업용 부품)에 이상적입니다.
딥러닝 기반 검출 : 합성곱 신경망(CNNs)은 수동 전처리 과정 없이 원본 이미지로부터 직접 경계를 추출합니다. 예를 들어, HED (Holistically-Nested Edge Detector) 및 RCF (Richer Convolutional Features) 고해상도 에지 맵을 위해 다중 스케일 CNN 특징을 융합하여 복잡한 장면(의료 이미지, 복잡한 환경)에서 우수함.
4. 주요 과제
기술 발전에도 불구하고 여전히 실생활 적용에는 어려움이 있음:
잡음 및 조명 : 공장 생산 라인, 저조도 또는 실외 환경에서는 경계선이 끊기거나 잘못된 윤곽이 생성될 수 있음.
겹쳐짐/가려짐이 있는 물체 : 쌓여 있는 부품들이 윤곽선을 합쳐 버려 개별 형태를 구분하기 어려움.
투명하거나 반사되는 재질 : 유리나 금속이 빛을 산란시켜 약하거나 왜곡된 경계를 생성합니다.
실시간 성능 : 산업용 작업(생산 라인 검사)은 초당 30프레임(FPS) 이상이 필요합니다. 딥러닝 모델은 속도 요구사항을 충족하기 위해 최적화(양자화, GPU 가속)가 필요합니다.
5. 실제 적용 사례
윤곽선 검출(contour detection)이 산업 전반에서 자동화를 주도합니다:
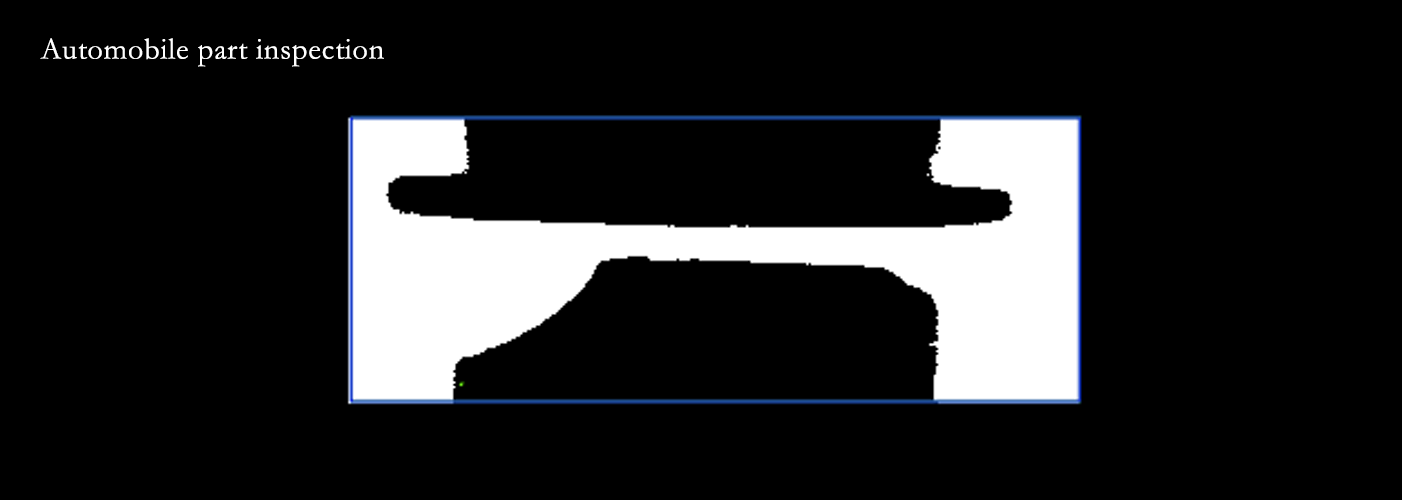
산업 품질 검사 : 제조업에서 결함(균열, 흠집)을 검사합니다. 예를 들어, 자동차 생산에서는 엔진 부품(기어, 가스켓)이 설계된 윤곽선과 일치하는지 확인하고, 허용오차 범위를 벗어난 부품은 거부합니다.
로봇 피킹 앤 플레이싱(Pick-and-Place) : 로봇이 물체의 위치를 파악하는 데 도움을 줍니다. 창고에서 로봇 팔은 컨베이어 벨트 위의 패키지 윤곽선을 인식하여 중심과 방향을 계산하고 그립을 조정합니다.
의료 영상 : 해부학적 구조(CT 스캔의 종양, 조직 슬라이드의 세포 경계)를 분할하여 진단을 돕습니다. 딥러닝 모델은 변동이 큰 생물학적 조직도 잘 처리할 수 있습니다.
농업 : 윤곽선 분석을 통해 과일(사과, 오렌지)을 크기와 익은 정도로 분류하고, 잎 윤곽선의 변화를 감지하여 작물 질병을 확인합니다.
교통 모니터링 : 감시 카메라를 사용하여 차량을 추적하고, 흐름을 측정하거나, 비정상적인 윤곽 또는 정지된 물체를 식별함으로써 사고를 감지합니다.
6. 향후 트렌드
세 가지 트렌드가 윤곽선 감지 기술을 형성할 것입니다:
엣지 AI 통합 : 경량 모델(양자화된 CNN)이 엣지 장치(산업용 카메라, 드론)에서 실행되어 클라우드 의존 없이 실시간 처리가 가능해집니다. 이는 자율 로봇에 있어 매우 중요합니다.
멀티-모달 퓨전 : 시각 데이터와 LiDAR/열화상 이미지를 결합하면 열악한 환경에서도 감지 성능을 개선할 수 있습니다(예: 열화상은 어두운 환경에서 윤곽 인식을 향상시키고, LiDAR는 겹쳐진 물체에 대해 3D 깊이 정보를 제공합니다).
설명 가능한 AI (XAI) : XAI 기술은 딥러닝 모델이 윤곽선을 어떻게 감지하는지 설명함으로써 의료 진단, 항공우주 검사 등과 같은 핵심 분야에서 신뢰성을 높일 것입니다.
결론
기계 시각 윤곽선 검출은 원본 이미지 데이터를 활용 가능한 인사이트에 연결하여 자동화 및 품질 관리를 구현합니다. 전통적인 에지 검출에서 딥러닝 기술로 발전해 복잡한 과제를 해결해 왔습니다. 기술이 발전함에 따라 스마트 시스템의 핵심 역할을 하며, 다양한 산업 분야에서 기계를 더욱 능력 있고 신뢰성 있게 만들고 있습니다.





