

Туура саптык сканерлеү камерасын тандоого жардам берген кеңештер
Сызыктык сканерлео камерасынын негиздери: архитектурасы, принциби жана негизги артыкчылыктары
Сызыктык сканерлео түшүрүшүнүн аймактык сканерлеодон айырмасы — кыймылдын булгунууну жоюу жана чексиз вертикалдык чечкичтүүлүктү камсыз кылуу
Аймактык сканерлөө камералары бардык 2D-сүрөттөрдү бирден тартат, ал эми сызыктык сканерлөө камералары башкача иштейт. Аларда сурөттү постепенно куруу үчүн бир гана пиксельдик сызык бар, бул процесс камера көрүнүшүнөн нерселер өткөндө жүрөт. Система вращающийся же сызыктык энкодерлер сыяктуу заттардын кыймылы менен синхрондоодо, ошондуктан нерселер 10 метрден ашык секундасына барып жатканда да сүрөттөр чачырап кетпейт. Бул учурда эң маанилүү нерсе — вертикалдык чечкиликтүүлүк теориялык түрдө чексиз болушу мүмкүн. Сүрөттүн бийиктиги камера алдынан өткөн нерсенин жолунун узундугуна гана байланыштуу, ал эми сенсордун өлчөмү менен чектелбейт. Ошондуктан сызыктык сканерлөө технологиясы полупроводниктерди өндүрүштө текшерүү же туурасы 3000 мм болгон чоң металл каттарын көзөмөлдөө сыяктуу так иштерде жакшы натыйжа берет. Традициондук аймактык сканерлөө системалары мындай шарттарда же чоң түзүлгөн сүрөттөрдү түзүп, же процесс боюнча маанилүү деталдарды жоготуп, бул маселелерди чече албайт.
Негизги компоненттер түшүндүрүлгөн: сызыктуу сенсор, линиялык жылдамдык двигателі, энкодер интерфейси жана чыныгы убакытта синхрондаштыруу логикасы
Бул тактыкты камсыз кылуу үчүн төрт өз ара байланышкан компонент колдонулат:
- Сызыктуу сенсорлор , адатта 1–16 миң активдүү пиксели бар CMOS же CCD массивдери, горизонталдуу чечкичтик жана спектралдык жооп берүүнү аныктайт.
- Линиялык жылдамдык двигателдери пикселдик маалыматтарды 10–140 кГц жылдамдыкта иштетет, объекттин жылдамдыгын үлгүлөөнүн жыштыгына динамикалык ылайыкташтырат.
- Энкодер интерфейстер механикалык кыймылды так триггер сигналдарына айландырат — квадратура декоддоо аркылуу ±0,01% ылдамдык синхрондаштыруусун камсыз кылат.
- Чыныгы убакытта синхрондаштыруу логикасы вибрациядан пайда болгон жыгылуу же өтүштүк ылдамдык өзгөрүштөрүн түзөтөт, үзгүлтүсүз скандалоо учурунда пиксельден төмөн тескере туташтырууну сактап калат.
Бул элементтер бирге иштеп, цилиндрик беттердин, чексиз тасмалардын жана термалык тургансыз материалдардын тажрыйбалык түрдө бузулушсуз сүрөттөөсүн камсыз кылат — бул мүмкүнчүлүк аймактык негиздеги архитектуралар үчүн негизинен жок.
Сапаттуу саптардын жыштыгы, кыймылдагы ылдамдык жана кеңиштик чечимдүүлүгүнүн так дал келүүсү
Негизги теңдеу: Δx = v / fline — жана пиксельден мм га калибрлөө үчүн аны колдонуу ыкмасы
Сызыктык сканерлөөнүн суроолорунда так кеңишилик өлчөмдөрүн алуу негизинен объекттин ылдамдыгы (v) менен камеранын сызыктык жыштыгы (fline) ортосундагы ылдамдыктын туура ылдамдыкка дал келүүсүнө байланыштуу. Бул ылдамдыктын негизинде төмөнкү негизги формула жатат: delta x = v / fline, бул пиксельдин чыныгы аралыгын көрсөтөт. Мисалы, конвейер лентасы 500 миллиметр/секунда ылдамдыкта жылгылып жатса жана камерабыз 10 килогерцке орнотулган болсо, бул эсептөөдөн пиксельге туура келген чыныгы чакырым 0,05 миллиметр чыгат. Бул системаларды калибрлөөдө надёждуу ылдамдык өлчөмдөрүн алуу өтө маанилүү. Көпчүлүк адамдар бул максатта лазер Допплер ылдамдык өлчөгүчтөрүн колдонот, андан кийин сызыктык жыштыгын керектүү delta x маанисине жетиштирүү үчүн түзөтүштөрдү жүргүзөт. Жана айытмаларга көңүл бургула. Эгерде айытма ±2% дан ашып кетсе, анда тактык маанилүү болгон колдонулуштарда, мисалы, басылган электрондук плата (ПЭП) трассаларынын туурасын текшерүүдө ката-кылдыктар пайда болот.
Энкодер негизделген синхрондаштыруу: жогорку вибрация же өзгөрүүчү тездик шарттарында подпиксельдик тескэртүүнү камсыз кылуу
Машиналар титрөөгө учуруп же алардын ылдамдыгы күтүлбөгөн натыйжада өзгөрсө, бул суроолорду тескере түзүүгө жана өлчөөлөрдү туруктуу кайталоого тоскоолдук кылат. Энкодерди кыймыл системасынын оңойлуктун кайтарылган сигналы менен синхрондоо аркылуу суроолордун тескере түзүлүшүнүн убактысын тактап алууга болот. Бул ошондой эле ылдамдык 15% чейин өзгөрсө дагы, сапатты контролго алуу үчүн маанилүү болгон под-пиксель деңгээлиндеги тескере түзүлүштөрдү алганыбыз дегенди билдирет. Санлар да өзүнчө сөйлөйт: буруу энкодерлер бурчтарды 0,001 градуска чейин өлчөй алат, ал эми сызыктык энкодерлер позицияларды 1 микрометр ичинде тизип алат. Бул мүмкүнчүлүктөр катуу өнөрөлүк шарттарда баардык айырмачылыкты түзөт. Мисалы, бардыгы түбүнчө титрөгөн темир-болот заводдорун же тартылуу даайым өзгөрүп турган токоч ткань фабрикаларын эске алыңыз. Туура энкодер синхрондоосу менен системалар жараксыз продукцияны таштап, жакшы продукцияны таштап жибербей, чыныгы кемчиликтерди табат. Изилдөөлөр бул ыкма жөнөкөй триггер пункттары жок, эркин иштеген башка ыкмаларга салыштырганда, жалган кайтарылыштарды 40% чейин азайтат дегенди көрсөтөт.

Колдонуу-баштапкы тандоо критерийлери жалпы өнөрөсөлдүк колдонуу учурлары үчүн
Веб-инспекция: кергилүүнүн өзгөрүшүн, тигүүнүн үзгүлтүсүздүгүн жана чыныгы убакытта кемчиликтерди локализациялоону башкаруу
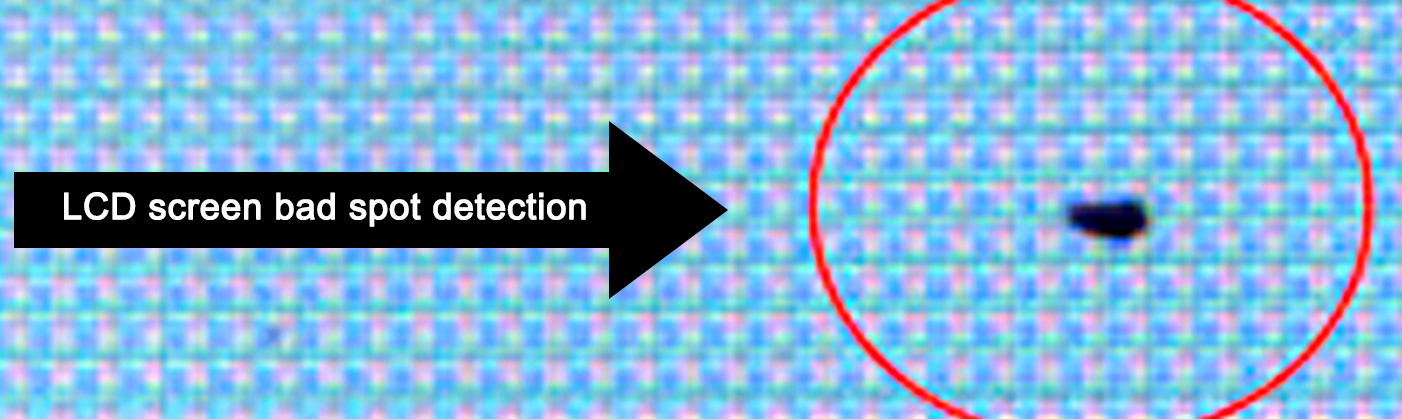
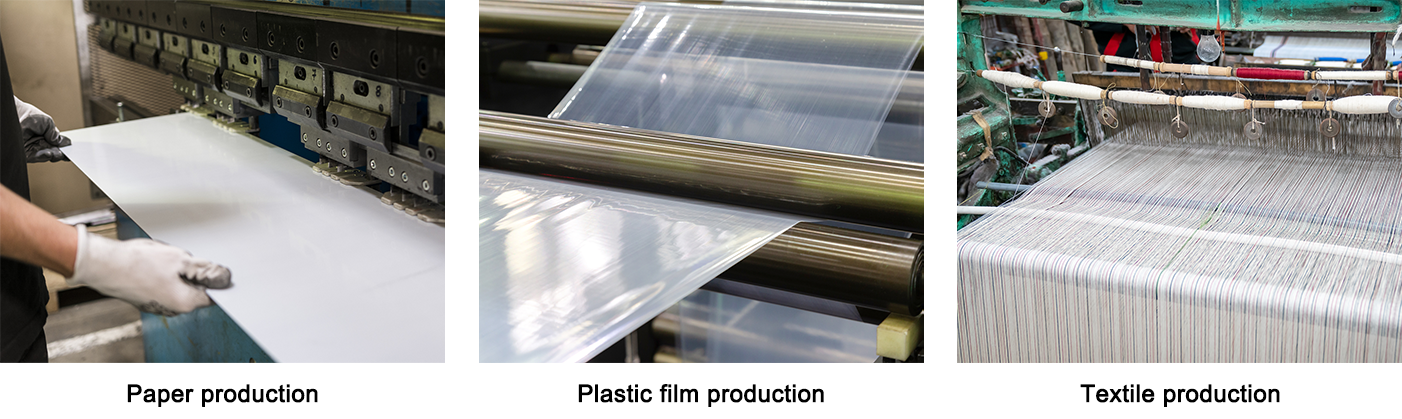
Кагаз, пластиктик пленкалар, металл фольгалар же тканьдык веб-материалдар сыяктуу үзгүлтүс чыгарылган веб-материалдар менен иштегенде, өндүрүштүн жеринде эң маанилүү үч негизги факторго негизделген сызыктык сканердөө камераларын тандоо керек. Биринчи чыңалуу процесс боюнча керилүүдөгү өзгөрүштөрдөн улам ылдамдыкта болгон өзгөрүштөрдү камтып алат. Бул үчүн суроо-талаптарга жооп берүү үчүн системалар минимум 20 килогерц жыштыкта иштеген адаптивдүү контроллерлерге жана кодердин кері байланыш циклдерине ээ болушу керек, анда сүрөттөр бүтүн туурасы боюнча пикселден пикселге чейин так тескеленет. Экинчи чыңалуу – сүрөттөрдү саптар ортосунда боштук калбай туташтыруу үчүн пикселдик массивдердин так өтүшүн камсыз кылуу. Өндүрүшчүлөр жалпы текшерүү натыйжаларында үзгүлтүс болбостон сактоо үчүн синхронизацияны бир микросекунддан жакшы кылууга умтулат. Үчүнчү чыңалуу – айыптарды алгачкы пайда болушунда табуу онборддук иштетүү күчүнө көп таянат. Көптөгөн заманбап системалардын көпчүлүгү азыркы учурда порогдуу детекция сыяктуу негизги сүрөттөрдү иштетүү тапшырмаларын тездетүү үчүн FPGA чиптерин колдонот, бул продукттарды кайтарылганга чейин маселелерди бардыгы 5 миллисекунд ичинде белгилеп чыгат. 2023-жылы жүргүзүлгөн жакынкы изилдөөлөр айыптарды табуу деңгээлини 8 метр секундада саптык ылдамдыкта иштегенде аймактык сканердөө технологиясынан сызыктык сканердөө технологиясына өтүш аркылуу 92% га жакшыртылганын көрсөттү, бул үчүн азыркы учурда көпчүлүк конвертерлер бул өтүштү жасап жатат.
Цилиндрикалык бөлүктү сканерлөө: бурчтук чечкирликти карталоо, бурулуу энкодерди тескере тургузуу жана көрүү өлчөмүнүн бузулушунун кырсык-кылдыйлары
Бутылкалар, подшипниктер же автобус шафтылары сыяктуу айлануучу компоненттер менен иштегенде, бурчтук чечкирлик ишке жарамдуу сенсорду тандоодо негизги роль ойнойт. Негизги формула төмөнкүдөй көрүнөт: N барабар пи, көбөйтүлгөн диаметр, бөлүнгөн RPM, көбөйтүлгөн 60, көбөйтүлгөн талап кылынган кеңишилген чечкирлик. Бул сандарды туура аныктоо маанилүү, анткени айлануучу энкодерлердин туура орнаштырылбаганы оорунчу проблемаларга алып келет. Ошол мисалдардын жарымында бул туура орнаштырылбагандыктан радиалдык деформация 15% ден жогору болот, ошондуктан көпчүлүк техниктер башында квадратура сигналдарын колдонуп, өз иште жайгаштырууларын текшерет. Дагы бир көзөмөлдөнүшү керек нерсе — оптикалык деформация. Жөнөкөй линзалар кыймылдуу четтерде сүрөттөрдү бүркүтүп, баррелдик деформация деп аталган кубулушту тудурат. Ошондуктан кээ бир колдонулуштар өлчөмдөгү ката кылдырууну бүткүл көрүнүш аймагында 0,1% дан төмөн держалоо үчүн телецентрик оптикага өтөт. Жарыктын чагылышы маселелүү болгондо автомобиль шафтыларын текшерүүдө 8-биттен 12-битке өтүү чоң айырмачылык түзөт. Көпчүлүк мастердиктер өзгөртүүдөн кийин жалган көрсөтүүлөрдүн 70% га төмөндөгөнүн баяндайт, бирок натыйжалар конкреттүү шарттарга жараша өзгөрөт.
Сызыктык сканерлөө камерасы жана аймактык сканерлөө камерасы: Эң жакшы ROI үчүн кайсы бирин тандоо керек?
Сызыктык сканерлөө камерасынын салыштырмалуу өнүмдүүлүгү жана баасынын тириштиги аныкталган беш чечимдүү сценарий
Аймактык сканерлөө камeralары айрым, тынч же төмөн ылдамдыктагы объекттер үчүн калыпташкан болсо да, сызыктык сканерлөө технологиясы беш көп көлөмдүү өнөрөттүк контекстте жогорку деңгээлдеги өнүмдүүлүк жана мыкты ROI көрсөтөт:
- Жогорку ылдамдыктагы веб-тексерүү (каğıз, фольга, пленкалар), мында кыймылдан пайда болгон булануу аймактык сканерлөөнүн тактыгын төмөндөт; сызыктык сканерлөө 1D кесилгендерди 70 кГцден жогору жылдамдыкта искерчиликке тоскоолдук түзбөй, километрлік масштабдагы түшүрүлүштү камсыз кылат.
- Металл полосасын контролдоо ысык көтөрүүдө, мында температура өзгөрүшү жана конструкциялык титрөөлөр субпиксельдик тескере туташтырууну сактоо үчүн энкодер менен синхрондоштурулган түшүрүлүштү талап кылат.
- Текстиль өндүрүшү , мында материянын эластичности жана керилүүнүн өзгөрүшү реалдуу убакытта пикселдерди калибрлеоо аркылуу башкарылат — бир нече камералык аймактык сканерлөө системаларында пайда болгон тигиле-тигиле артефакттардын алдын алуу үчүн.
- айланып турган цилиндрик деталдарды 360° тексерүү бул жерде бурчтук чечимдүүлүк карталоо 2000 RPM жана андан жогору тездикте микрон деңгээлдеги кемчиликтерди аныктоого мүмкүндүк берет.
- Чоң аймактуу сканерлөө (күн энергиясынын панелдеринде, авиа-космос композиттеринде), бул жерде линиялык сканерлөө көп камералуу тескере турган жана калибрлөө иштеринин кадамын талап кылбайт.
Бул колдонулуштарда линиялык сканерлөө системалары аппараттык жабдуу жана интеграциялык чыгымдарды 30–60% га азайтат, ошондой эле аймактык сканерлөө системаларында кыймылдын артефакттарынан келип чыккан жалган таштоолорду жакында 15% га кыскартат. Алардын масштабдалуучулугу жана бир сенсорлуу архитектурасы жогорку өтүштүүлүктү талап кылган өндүрүш ортосунда 8–12 ай ичинде ROI (кайтарылган инвестиция) берет.

Сиздин өнөрөс колдонулушуңуз үчүн туура линиялык сканерлөө камерасын тандоого даярбыңыз?
Туура линиялык сканерлөө камера — надёждуу, жогорку тездиктеги өнөрөс текшерүүсүнүн негизи. Эчбир алгоритм же программалык камсыздануу камера менен сиздин линия тездиги, чечимдүүлүк талаптары же өндүрүш ортосу ортосундагы үйлэшпөөнү толуктап берэ албайт. Линиялык тездик, сенсордун чечимдүүлүгү, энкодер синхронизациясы жана оптикалык дизайнды сиздин конкреттүү колдонулушуңузга ылайыкташтырып, сиз өндүрүш ишleteңиз үчүн тоскоолсуз, микрон-тактыкта талдоо, жалган кайтарууларды азайтуу жана өлчөмдөөгө мүмкүнчүлүк берген ROI (инвестициядан түшкөн киреше) алыңыз.
Себептүү веб-талдоо, цилиндрик талдоо же чоң форматтагы сүрөттөө үчүн өнөрлүк деңгээлдеги линиялык сканердөө камерасынын чечимдери же HIFLY тарабынан сунушталган кошумча жарык, объективдер жана энкодер синхрондаштыруу инструменттери менен толук интеграцияланган машиналык көрүү системасын түзүү үчүн, өнөрлүк машиналык көрүү экспертизасында негизделген камсыздаш менен иштениз. HIFLYнын 15 жылдан бери 10 GigE 8K линиялык сканердөө камераларын, көп спектрдүү сүрөттөө системаларын жана өнөрлүк талдоонун башынан аягына чейинки чечимдерин иштеп чыгуу боюнча тажрыйба бар — ISO 9001:2015 сертификаты, 30дан ашык изобретение патенттери жана 30дой өлкөдөгү 2500дөн ашык клиенттерге колдоо көрсөтүлүп келет. Ишлетегиз үчүн идеалдуу линиялык сканердөө камерасын тандоо үчүн бүгүн эле бизге кайрылуу үчүн милдеттүүлүк жок консультацияга тапшырыңыз.





