

Panduan Kamera Tahap Papan untuk Sistem Penglihatan Terbenam
Bagi pengeluar kelengkapan asal (OEM), pengintegrasi sistem, dan pasukan kejuruteraan penglihatan terbenam, kamera tahap papan merupakan blok binaan asas bagi sistem penglihatan terbenam yang padat, boleh dipercayai, dan berprestasi tinggi. Panduan komprehensif ini menerangkan secara terperinci kriteria pemilihan utama, protokol antara muka, keperluan ekosistem perisian, serta amalan terbaik integrasi fizikal untuk kamera tahap papan, bagi membantu pasukan kejuruteraan anda mengoptimumkan rekabentuk penglihatan terbenam untuk aplikasi industri, perubatan, automotif, dan infrastruktur pintar.
Kriteria Pemilihan Utama untuk Kamera Tahap Papan
Mengimbangi Prestasi Sensor dengan Sekatan Kuasa dan Haba
Memilih kamera tahap papan memerlukan pengoptimuman keupayaan sensor berdasarkan bajet kuasa dan had terma. Sensor beresolusi tinggi (contohnya, 12MP+) mengguna tenaga 30–50% lebih banyak berbanding sensor setara 2–5MP, serta menghasilkan haba yang menjejaskan kebolehpercayaan dalam rekabentuk tanpa kipas. Sistem penglihatan industri yang dipasang di ruang terhad memperoleh manfaat paling besar daripada sensor berisik rendah yang mengambil <1W sambil mengekalkan nisbah isyarat-ke-bisingan (SNR) >40dB. Jurutera perlu mengesahkan prestasi terma menggunakan imej inframerah semasa fasa prototaip—suhu yang dikekalkan melebihi 85°C akan mempercepatkan kemerosotan sensor sebanyak 4 kali ganda (Journal of Embedded Systems, 2023).

Menyesuaikan Resolusi, Kadar Bingkai, dan Julat Dinamik dengan Keperluan Aplikasi
Penyesuaian tepat spesifikasi kamera dengan tuntutan operasi mengelakkan rekabentuk berlebihan dan peningkatan kos. Pertimbangkan pasangan kritikal berikut:
| Permohonan | Spek Optimal | Dasar Penentuan |
|---|---|---|
| Pengambilan dan Penempatan Robotik | 5MP @ 60 fps, 120 dB DR | Mengimbangkan kelajuan pengenalan komponen dengan keadaan pencahayaan yang berubah-ubah di gudang |
| Endoskopi Perubatan | 1080p @ 30 fps, >75 dB DR | Meminimumkan kabur gerak dalam rongga bercahaya rendah sambil mengurangkan lebar jalur data |
| Pemantauan Lalu Lintas | 4K @ 24 fps, WDR (140 dB) | Menangkap plat nombor kenderaan pada waktu subuh/senja tanpa kesan gerakan |
Mod julat dinamik tinggi (HDR) adalah penting di kawasan dengan pencahayaan yang berubah-ubah, walaupun ia menambah kelengahan pemprosesan sebanyak 15–20 ms. Pemilihan kadar bingkai mesti mencerminkan halaju objek: pemeriksaan pada talian penghantar yang bergerak pada 2 m/s memerlukan kadar bingkai ≥120 fps untuk menghadkan kabur gerakan kepada kurang daripada 0.5 piksel.
Protokol Antara Muka untuk Integrasi Kamera Tahap Papan yang Andal
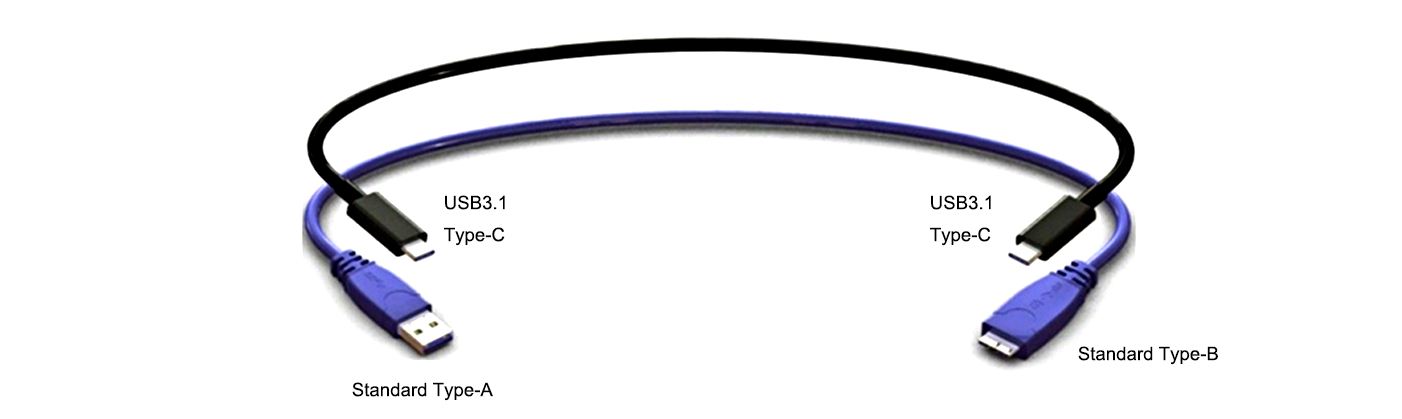
USB 3.1, MIPI CSI-2, dan LVDS: Lebar Jalur, Kelengahan, serta Kesesuaian dalam Dunia Sebenar
Memilih protokol antara muka yang optimum untuk kamera tahap papan memerlukan keseimbangan antara lebar jalur, latensi, dan sekatan persekitaran. USB 3.1 menawarkan kadar penghantaran 5 Gbps dengan kesederhanaan pasang-dan-main—ideal untuk imej perubatan atau kios di mana panjang kabel tidak melebihi 3 meter. MIPI CSI-2 memberikan lebar jalur yang boleh diskalakan (sehingga 6 Gbps melalui 4 saluran) dan penggunaan kuasa yang sangat rendah, menjadikannya piawaian de facto untuk sistem mudah alih dan tertanam berbasis ARM. LVDS menyediakan ketahanan hingar yang unggul dalam persekitaran yang bising secara elektrik seperti automasi kilang, walaupun lebar jalurnya yang kurang daripada 1 Gbps menghadkan penggunaannya dalam kes penggunaan resolusi tinggi. Bagi robotik masa nyata, latensi MIPI CSI-2 yang kurang daripada 5 ms mengatasi julat latensi USB 3.1 iaitu 10–20 ms. Utamakan protokol berdasarkan keperluan penempatan: USB 3.1 untuk pembuatan prototaip pantas, MIPI untuk peranti tepi yang terhad kuasa, dan LVDS untuk jentera industri.
Ekosistem Perisian dan Sokongan SDK untuk Kamera Tahap Papan
SDK Merentas Platform (Spinnaker, Aravis) dan Keserasian RTOS ARM/x86
Kit pembangunan perisian (SDK) yang kukuh adalah tidak dapat digantikan untuk mempercepatkan pelaksanaan sistem penglihatan dengan kamera tahap papan. Penyelesaian merentas platform seperti Spinnaker dan Aravis menyediakan antara muka piawai yang mengabstrakkan kerumitan perkakasan, membolehkan kebolehportalan kod antara persekitaran pembangunan dan pengeluaran. Spinnaker menyokong pelbagai arsitektur—termasuk x86, ARM, dan sistem operasi masa nyata (RTOS)—melalui API bersatu, membolehkan jurutera membuat prototaip pada komputer riba dan melaksanakannya secara lancar ke sasaran tertanam. Sementara itu, rangka kerja sumber terbuka seperti Aravis menawarkan pematuhan GenICam tanpa mengira pembekal untuk sistem berasaskan Linux. Keluwesan arsitektur ini mengurangkan halangan integrasi sebanyak 40% berdasarkan kajian penerimaan penglihatan tertanam (2023). Pertimbangan utama termasuk keserasian RTOS untuk kelengkapan latensi yang pasti dalam kawalan industri, sokongan pelbagai arsitektur untuk memastikan ketahanan masa depan terhadap perlombongan perkakasan, serta lapisan abstraksi yang memudahkan pembangunan pemacu. Keserasian dengan persekitaran RTOS ringan memastikan operasi yang boleh dipercayai dalam aplikasi yang terhad sumber seperti robot mudah alih autonomi atau peranti perubatan, di mana pelaksanaan tanpa gangguan adalah wajib.
Integrasi Fizikal: Bentuk Faktor, Pemasangan Lensa, dan Ketahanan Terhadap Persekitaran
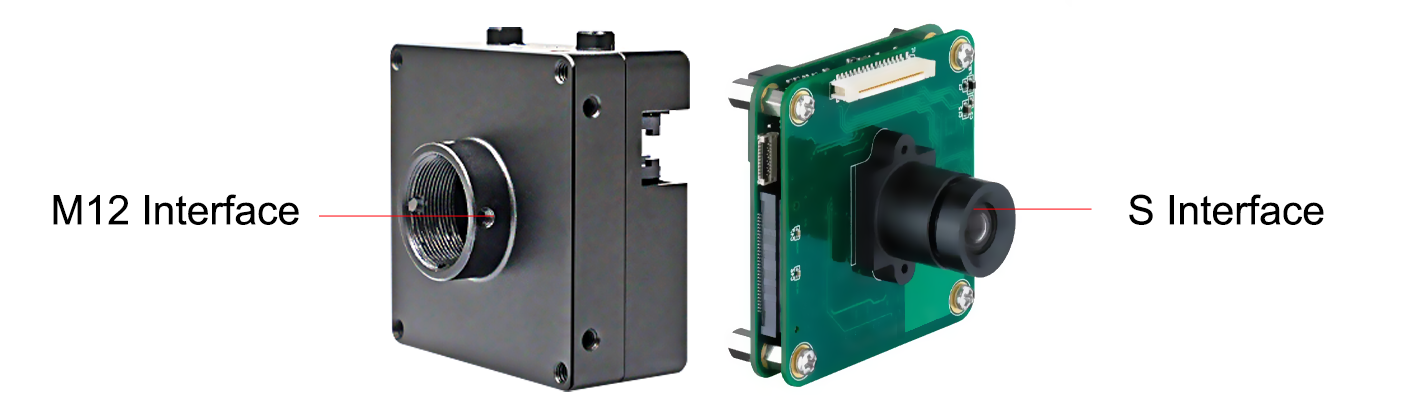
Antara Muka M12, S-Mount, dan Suai — Medan Pandangan dan Kelenturan Optik
Antara muka pemasangan lensa secara langsung mempengaruhi prestasi optik dalam sistem penglihatan terbenam. Dudukan M12 piawai menawarkan penyesuaian medan pandangan (FOV) yang berkesan dari segi kos untuk aplikasi industri, manakala S-Mount menyediakan penyelesaian padat untuk rekabentuk yang terhad ruang. Antara muka suai membolehkan keperluan FOV khusus seperti sudut ultra-lebar atau konfigurasi telecentrik. Faktor optik penting termasuk:
- Kawalan Penyimpangan : Distorsi barrel <0.1% mengekalkan ketepatan pengukuran dalam metrologi
- Kestabilan Mekanikal : Mekanisme penguncian menghalang pergeseran fokus semasa pendedahan getaran 15G
- Kepekaan NIR : Sokongan panjang gelombang 850nm meningkatkan prestasi dalam keadaan cahaya rendah
- Penguatan Persekitaran : Segel bertaraf IP67 melindungi terhadap penembusan zarah
Rekabentuk Termal dan Pematuhan EMC dalam Penerapan Tanpa Kipas dan Tanpa Bekas
Pengurusan haba menjadi kritikal apabila mengendalikan kamera peringkat papan dalam persekitaran tanpa kipas yang melebihi 60°C. Strategi berkesan termasuk penyebar haba tembaga yang mampu membuang beban haba lebih daripada 5W, bahan antara muka yang stabil secara terma untuk mengekalkan integriti sensor di sepanjang julat suhu –40°C hingga 85°C, dan pengoptimuman susun atur PCB yang memisahkan komponen penjana haba daripada sensor imej. Keserasian Elektromagnetik (EMC) memastikan operasi yang boleh dipercayai dalam persekitaran industri yang berisik secara elektrik. Pematuhan memerlukan pegangan terhadap piawaian utama:
| Keperluan | Piawaian | Aplikasi Kritikal |
|---|---|---|
| Pelepasan Ter pancar | Bahagian 15 FCC Kelas B | Diagnostik perubatan |
| Imuniti | IEC 61000-4-3 | Penyambungan kenderaan |
| Pelindungan ESD | IEC 61000-4-2 | Pengolahan Makanan |
Penggunaan pentanahan yang betul dan bekas terlindung mengurangkan risiko gangguan sebanyak 40% dalam pemasangan tanpa bekas (EMC Journal 2023).
Sedia Mengoptimumkan Sistem Penglihatan Terbenam Anda dengan Kamera Peringkat Papan yang Disesuaikan?
Kamera tahap papan adalah teras sistem penglihatan tertanam yang boleh dipercayai, padat, dan berprestasi tinggi—tiada penyelesaian siap pakai yang mampu menandingi penyesuaian, kecekapan tenaga, dan fleksibiliti integrasi reka bentuk kamera tahap papan yang disesuaikan khas untuk pengeluar asal (OEM). Dengan menyelaraskan prestasi sensor, protokol antara muka, sokongan perisian, dan faktor bentuk fizikal mengikut keperluan aplikasi unik anda, anda akan mencapai masa pelancaran ke pasaran yang lebih pantas, mengurangkan kos senarai bahan (BOM), serta memastikan kebolehpercayaan jangka panjang yang konsisten walaupun dalam persekitaran tertanam yang paling mencabar.

Untuk penyelesaian kamera peringkat papan berkelas industri yang disesuaikan dengan aplikasi penglihatan terbenam OEM anda, atau untuk membina sistem penglihatan terpadu sepenuhnya dengan lensa pelengkap, pencahayaan, dan alat pemprosesan tepi (seperti yang ditawarkan oleh HIFLY), bekerjasamalah dengan penyedia yang berakar dalam bidang penglihatan mesin industri dan kepakaran penyesuaian OEM. Pengalaman 15 tahun HIFLY merangkumi rekabentuk kamera peringkat papan, pembuatan tersuai penuh OEM/ODM, serta integrasi sistem penglihatan terbenam dari hujung ke hujung—disokong oleh sijil ISO 9001:2015, sokongan kepatuhan peraturan global, dan perkhidmatan kejuruteraan rekaan-dalam yang khusus. Hubungi kami hari ini untuk perundingan tanpa komitmen, pembuatan prototaip tersuai, atau untuk mereka bentuk kamera peringkat papan yang dioptimumkan khusus bagi projek penglihatan terbenam anda.





