

Petua untuk Memilih Kamera Imbas Garisan yang Sesuai
Asas Kamera Imej Garis: Arkitektur, Prinsip, dan Kelebihan Utama
Bagaimana pengimejan garis berbeza daripada pengimejan kawasan—menghilangkan kabur pergerakan dan membolehkan resolusi menegak tanpa had
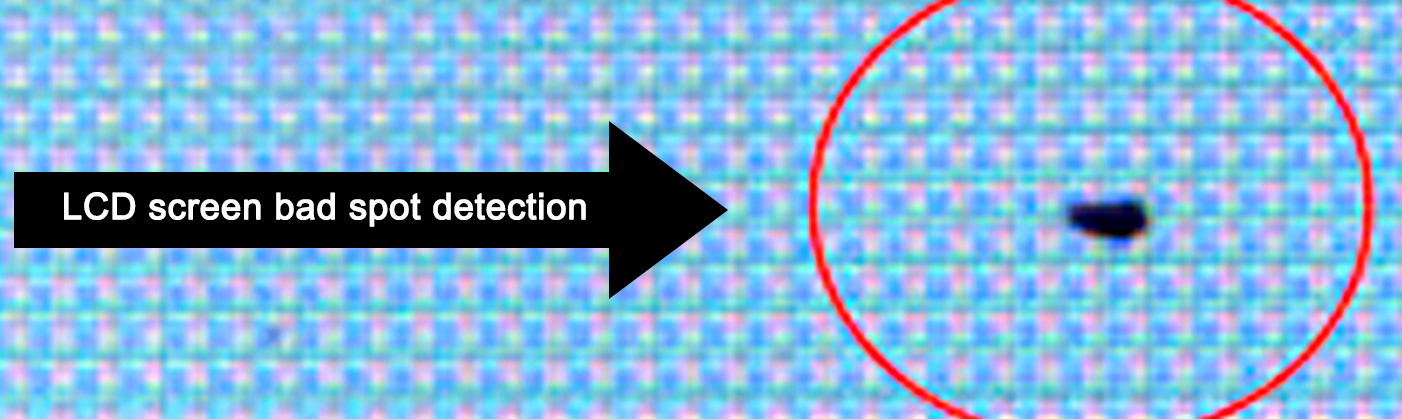
Kamera imbas kawasan mengambil gambar 2D lengkap secara serentak, manakala kamera imbas garisan beroperasi secara berbeza. Kamera ini hanya mempunyai satu baris piksel yang membina imej secara beransur-ansur apabila objek bergerak melintasi pandangan kamera. Sistem ini diselaraskan dengan pergerakan menggunakan komponen seperti pengimbas putaran atau pengimbas linear, sehingga tiada kaburan walaupun objek bergerak sangat laju—kadangkala melebihi 10 meter sesaat. Yang paling penting di sini ialah resolusi menegak pada asasnya boleh dipanjangkan tanpa had. Ketinggian imej bergantung sepenuhnya kepada jarak yang dilalui objek di hadapan kamera, bukan dibatasi oleh saiz sensor itu sendiri. Oleh sebab itu, teknologi imbas garisan bersinar dalam tugas-tugas tepat seperti pemeriksaan semikonduktor semasa proses pembuatan atau penjejakan gulungan logam besar yang lebarnya mencapai 3.000 mm. Sistem imbas kawasan tradisional tidak mampu mengendali situasi sedemikian tanpa sama ada menghasilkan imej bersambung yang sangat besar atau kehilangan butiran penting dalam proses tersebut.
Komponen utama dijelaskan: sensor linear, enjin kadar baris, antara muka pengenkod, dan logik penyegerakan masa nyata
Empat komponen saling bersandar membolehkan ketepatan ini:
- Sensor linear , biasanya tatasusun CMOS atau CCD dengan 1–16k piksel aktif, menentukan resolusi mengufuk dan sambutan spektrum.
- Enjin kadar baris memproses data piksel pada kadar 10–140 kHz, menyesuaikan secara dinamik halaju objek dengan frekuensi persampelan.
- Antara muka pengenkod menukar pergerakan mekanikal kepada isyarat pencetus yang tepat—mencapai penyegerakan kelajuan ±0.01% melalui penyahkodan kuadratur.
- Logik penyegerakan masa nyata mengimbangi jilauan akibat getaran atau perubahan kelajuan sementara, mengekalkan pendaftaran sub-piksel merentasi imbasan berterusan.
Secara bersama-sama, elemen-elemen ini menyokong pengimejan tanpa distorsi pada permukaan silinder, gulungan tanpa hujung, dan bahan-bahan yang tidak stabil secara terma—kemampuan-kemampuan yang secara asasnya tidak tersedia dalam seni bina berbasis kawasan.
Pemadanan Ketepatan Kadar Garisan, Kelajuan Gerakan, dan Resolusi Spatial
Persamaan utama: Δx = v / fline—dan cara menggunakannya untuk kalibrasi piksel-ke-mm
Mendapatkan pengukuran ruang yang tepat dalam imej imbasan garis bergantung kepada sejauh mana kelajuan objek (v) selaras dengan kadar garis kamera (fline). Pada asasnya, terdapat formula asas ini: delta x sama dengan v dibahagi dengan fline, yang memberitahu kita jarak sebenar yang diwakili oleh setiap piksel. Sebagai contoh, katakan kita sedang memeriksa tali sawat yang bergerak pada kelajuan 500 milimeter sesaat dan kamera kita ditetapkan pada 10 kilohertz. Pengiraan ini menghasilkan resolusi kira-kira 0.05 milimeter setiap piksel. Semasa menentukalibrasi sistem-sistem ini, pengukuran kelajuan yang boleh dipercayai amat penting. Kebanyakan orang menggunakan velosimeter Doppler laser untuk bahagian ini, kemudian menyesuaikan kadar garis sehingga mencapai nilai delta x yang diinginkan. Dan berhati-hatilah terhadap penyimpangan-penyimpangan tersebut. Jika penyimpangan melebihi ±2%, ralat mula kelihatan dalam aplikasi penting seperti pemeriksaan lebar jejak papan litar bercetak (PCB), di mana ketepatan sangat kritikal.
Penyelarasan berasaskan pengimbas: memastikan pendaftaran sub-piksel dalam persekitaran bergetar tinggi atau kelajuan berubah-ubah
Apabila mesin bergetar atau kelajuan mereka berubah secara tidak dijangka, ini menyebabkan isu penyesuaian masa yang menjadikan imej kurang tajam dan pengukuran lebih sukar diulang secara konsisten. Dengan mensinkronkan enkoder dengan maklum balas kedudukan sistem pergerakan, kita dapat mengawal tepat bila imej diambil. Ini bermakna walaupun kelajuan berubah sehingga 15%, kita masih memperoleh pendaftaran pada tahap sub-piksel yang begitu penting bagi kawalan kualiti. Nombor-nombor itu sendiri membuktikan keberkesanannya: enkoder putar mampu mengukur sudut sehingga 0.001 darjah, manakala enkoder linear mampu melacak kedudukan dalam jarak hanya 1 mikrometer. Kemampuan-kemampuan ini memberi perbezaan besar dalam persekitaran industri yang mencabar. Bayangkan kilang keluli di mana segalanya sentiasa bergetar atau kilang tekstil di mana tegangan berubah dari satu saat ke saat berikutnya. Dengan pensinkronan enkoder yang betul, sistem dapat mengesan cacat sebenar bukannya menyingkirkan produk baik secara tidak sengaja. Kajian menunjukkan pendekatan ini mengurangkan penolakan palsu sebanyak kira-kira 40% berbanding kaedah lama yang beroperasi secara bebas tanpa sebarang titik pencetus.

Kriteria Pemilihan Berdasarkan Aplikasi untuk Kes Penggunaan Industri Biasa
Pemeriksaan web: mengurus variasi ketegangan, kesinambungan jahitan, dan penempatan cacat secara masa nyata
Apabila bekerja dengan bahan web berterusan seperti kertas, filem plastik, foil logam, atau web fabrik, pemilihan kamera imbas garis (line scan) yang sesuai bergantung kepada tiga pertimbangan utama yang paling penting di lantai pengeluaran. Cabaran pertama melibatkan variasi kelajuan akibat perubahan ketegangan sepanjang proses. Untuk mengatasinya, sistem memerlukan pengawal adaptif yang beroperasi sekurang-kurangnya pada kadar 20 kilohertz bersama gelung suap balik enkoder supaya imej kekal selaras piksel demi piksel merentasi keseluruhan lebar. Kedua, penyambungan imej-imej tersebut tanpa jurang antara garis memerlukan tumpang tindih susunan piksel yang teliti. Pengilang biasanya menetapkan sasaran sinkronisasi lebih baik daripada satu mikrosekon untuk mengekalkan kesinambungan dalam hasil pemeriksaan akhir. Ketiga, pengesanan cacat secara masa nyata sangat bergantung kepada kuasa pemprosesan dalaman. Banyak sistem moden kini menggunakan cip FPGA untuk mempercepat tugas analisis imej asas seperti pengesanan ambang (threshold detection), membolehkan sistem mengenal pasti isu dalam tempoh hanya lima milisaat sebelum produk ditolak. Kajian terkini dari tahun 2023 menunjukkan bahawa peralihan daripada teknologi imbas kawasan (area scan) kepada teknologi imbas garis meningkatkan kadar pengesanan cacat sehingga hampir 92% apabila beroperasi pada kelajuan garis lapan meter sesaat, yang menjelaskan mengapa semakin banyak penukar kini membuat peralihan ini.
Pemindaian bahagian silinder: pemetaan resolusi sudut, penyelarasan enkoder putar, dan jebakan distorsi medan pandangan (FOV)
Apabila menangani komponen berputar seperti botol, galas, atau aci kereta, resolusi sudut memainkan peranan utama dalam memilih sensor yang sesuai untuk tugas tersebut. Formula asasnya adalah seperti berikut: N sama dengan pi didarab dengan diameter dibahagi dengan RPM darab 60 darab resolusi ruang yang diperlukan. Ketepatan nilai-nilai tersebut amat penting kerana penderia pengod tertib (rotary encoder) yang tidak selaras boleh menimbulkan masalah. Sekitar separuh daripada masa, ketidakselarasan ini menyebabkan distorsi radial melebihi 15%, justeru ramai juruteknik memeriksa susunan mereka terlebih dahulu menggunakan isyarat kuadratur. Perkara lain yang perlu diperhatikan ialah distorsi optik. Kanta biasa cenderung mengubah bentuk imej di tepi melengkung, menghasilkan apa yang dikenali sebagai distorsi tong. Oleh sebab itu, beberapa aplikasi beralih kepada optik telecentrik sebagai gantinya, yang mengekalkan ralat pengukuran di bawah 0.1% di seluruh kawasan pandangan. Bagi pemeriksaan aci automotif di mana pantulan cahaya (glare) menjadi isu, peralihan daripada sensor 8-bit ke 12-bit memberikan perbezaan yang ketara. Kebanyakan bengkel melaporkan penurunan sekitar 70% dalam bacaan palsu apabila mereka meningkatkan spesifikasi, walaupun hasilnya akan berbeza-beza bergantung pada keadaan khusus.
Kamera Imbas Garisan vs. Kamera Imbas Kawasan: Bilakah Memilih Setiap Satu untuk ROI Optimum
Lima senario menentukan di mana kamera imbas garisan memberikan prestasi dan kecekapan kos yang tiada tandingan
Walaupun kamera imbas kawasan masih paling sesuai untuk objek diskret, statik, atau berkelajuan rendah, teknologi imbas garisan memberikan prestasi unggul—dan ROI yang lebih kuat—dalam lima konteks industri berskala tinggi:
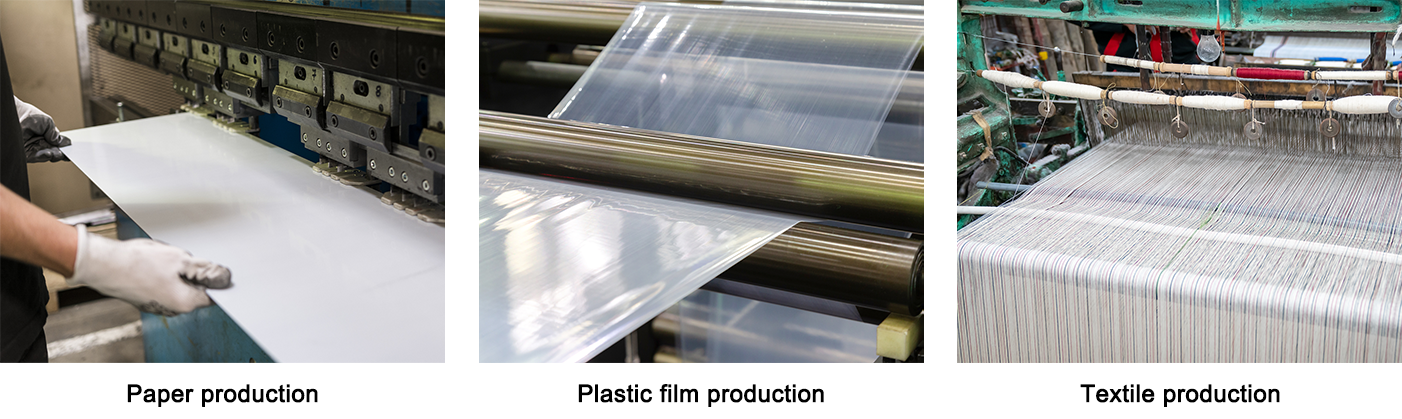
- Pemeriksaan web berkelajuan tinggi (kertas, foil, filem), di mana kabur gerak mengurangkan ketepatan imbas kawasan; imbas garisan menangkap irisan 1D bebas distorsi pada kadar >70 kHz, membolehkan pengimejan tanpa henti pada skala kilometer.
- Pemantauan jalur logam semasa penggulingan panas, di mana hanyutan haba dan getaran struktur memerlukan pengambilan yang disinkronkan dengan enkoder untuk mengekalkan pendaftaran sub-piksel.
- Pengeluaran tekstil , di mana keanjalan fabrik dan variasi ketegangan dikawal melalui penyesuaian piksel secara masa nyata—mengelakkan artefak penyambungan yang wujud dalam susunan kamera imbas kawasan berbilang kamera.
- pemeriksaan 360° terhadap komponen silinder berputar , di mana pemetaan resolusi sudut membolehkan pengesanan cacat pada tahap mikron pada kelajuan melebihi 2,000 RPM.
- Pengimbasan kawasan luas (panel suria, komposit penerbangan angkasa), di mana imbasan garis menghilangkan keperluan pelarasan dan penentukalaan berbilang kamera yang mahal.
Dalam aplikasi ini, sistem imbasan garis mengurangkan kos perkakasan dan integrasi sebanyak 30–60%, sambil mengurangkan penolakan palsu—yang sering disebabkan oleh artefak pergerakan dalam sistem imbasan kawasan—sebanyak kira-kira 15%. Kemampuan penskalaan dan arkitektur sensor tunggal mereka memberikan pulangan pelaburan (ROI) dalam tempoh 8–12 bulan dalam persekitaran pengeluaran berkelajuan tinggi.

Sedia Memilih Kamera Imbasan Garis yang Sesuai untuk Aplikasi Industri Anda?
Kamera imbasan garis yang sesuai merupakan asas kepada pemeriksaan industri yang boleh dipercayai dan berkelajuan tinggi—tiada algoritma atau perisian yang mampu mengimbangi ketidaksesuaian kamera terhadap kelajuan talian, keperluan resolusi, atau persekitaran pengeluaran anda. Dengan menyelaraskan kadar imbasan garis, resolusi sensor, penyegerakan enkoder, dan rekabentuk optik mengikut aplikasi khusus anda, anda akan buka kunci pemeriksaan tanpa jurang, tepat hingga mikron, mengurangkan penolakan palsu, dan ROI yang boleh diukur untuk operasi pembuatan anda.
Untuk penyelesaian kamera imbas garis berkelas industri yang disesuaikan dengan aplikasi pemeriksaan web, pengimbasan silinder, atau pengimejan format besar anda, atau untuk membina sistem penglihatan mesin terpadu sepenuhnya dengan pencahayaan pelengkap, lensa, dan alat penyelarasan enkoder (seperti yang ditawarkan oleh HIFLY), bekerjasamalah dengan penyedia yang berpengalaman dalam bidang penglihatan mesin industri. HIFLY 15 tahun pengalaman meliputi kamera imbas garis kelajuan tinggi 10 GigE 8K, sistem pengimejan multi-spektrum, dan penyelesaian pemeriksaan industri dari hujung ke hujung—disokong oleh sijil ISO 9001:2015, lebih daripada 30 paten penemuan, serta sokongan untuk lebih daripada 2,500 pelanggan di lebih daripada 30 negara. Hubungi kami hari ini untuk perundingan tanpa komitmen bagi memilih kamera imbas garis yang paling sesuai untuk operasi anda.





