

Berapa Banyak Kamera Industri yang Dapat Didukung oleh Satu Host dalam Sistem Vision?
Dalam sistem penglihatan moden, menentukan berapa banyak kamera yang boleh disokong oleh satu tuan (contohnya, sebuah komputer atau pelayan) adalah soalan penting untuk reka bentuk sistem, skalabiliti, dan pen optimuman kos. Jawapannya bergantung kepada pelbagai faktor yang saling berkaitan, termasuk keupayaan peralatan keras, kecekapan perisian, spesifikasi kamera industri, dan keperluan aplikasi. Artikel ini meneroka pemboleh ubah utama ini dan memberikan kerangka untuk menganggarkan kapasiti kamera dalam satu sistem penglihatan.
1. Komponen Peralatan Keras dan Impaknya
Peralatan keras hos adalah asas sokongan kamera, dengan dua aspek utama memainkan peranan besar.
1.1 Unit Pengolahan: CPU dan GPU
CPU memproses pelbagai tugas pemprosesan imej, dari penapisan asas hingga inferens pembelajaran mesin yang kompleks. Kamera ber-resolusi tinggi atau ber-kadar bingkai tinggi menghasilkan jilidan data besar, memberi tekanan kepada CPU. CPU multi-core, seperti Intel i9 atau AMD Threadripper, boleh membahagikan tugas di antara core untuk pemprosesan selari. Di pihak lain, GPU merevolusikan sistem penglihatan dengan mempercepatkan pengiraan selari, terutamanya penting untuk tugas seperti penglihatan 3D dan pembelajaran dalam memandu autonomi. Kamera yang disepadukan dengan paip selari GPU-optimized, seperti CUDA dalam GPU NVIDIA, memindahkan pemprosesan daripada CPU, secara potensi melipatgandakan bilangan kamera yang disokong.
1.2 Memori, Penyimpanan, dan I/O
RAM yang mencukupi adalah penting untuk menampung aliran video dan data yang telah diproses. Kamera 4K pada 30 FPS menghasilkan kira-kira 300 MB/s data tanpa kompresi, meningkatkan keperluan memori dalam susunan multikamera. Untuk kamera berresolusi tinggi, alokasikan sekurang-kurangnya 4–8 GB RAM untuk setiap kamera. Penyimpanan berkelajuan tinggi, seperti NVMe SSD, dan antara muka I/O yang kukuh seperti USB 3.2 dan PCIe adalah penting untuk penyerapan dan penyimpanan data. Antara muka lama boleh membataskan ketahanan sistem dengan ketara.
2. Industri Spesifikasi Kamera
Parameter-parameter kamera industri secara langsung mempengaruhi beban kepada sistem hos, terutamanya melalui dua faktor kritikal berikut.
2.1 Resolusi dan Kadar Bingkai
Resolusi dan kadar bingkai yang lebih tinggi bermakna lebih banyak data untuk diproses. Kamera 4K menghasilkan empat kali lebih banyak piksel berbanding kamera 1080p, meningkatkan keperluan pemprosesan secara signifikan. Begitu juga, kamera 120 FPS menghasilkan empat kali lebih banyak data berbanding kamera 30 FPS. Dalam siaran sukan, kamera dengan resolusi tinggi dan kadar bingkai tinggi digunakan tetapi membebankan beban yang sangat tinggi kepada hos, memerlukan peranti keras yang kuat untuk mengelakkan kehilangan kualiti.
2.2 Pemampatan dan Antaramuka
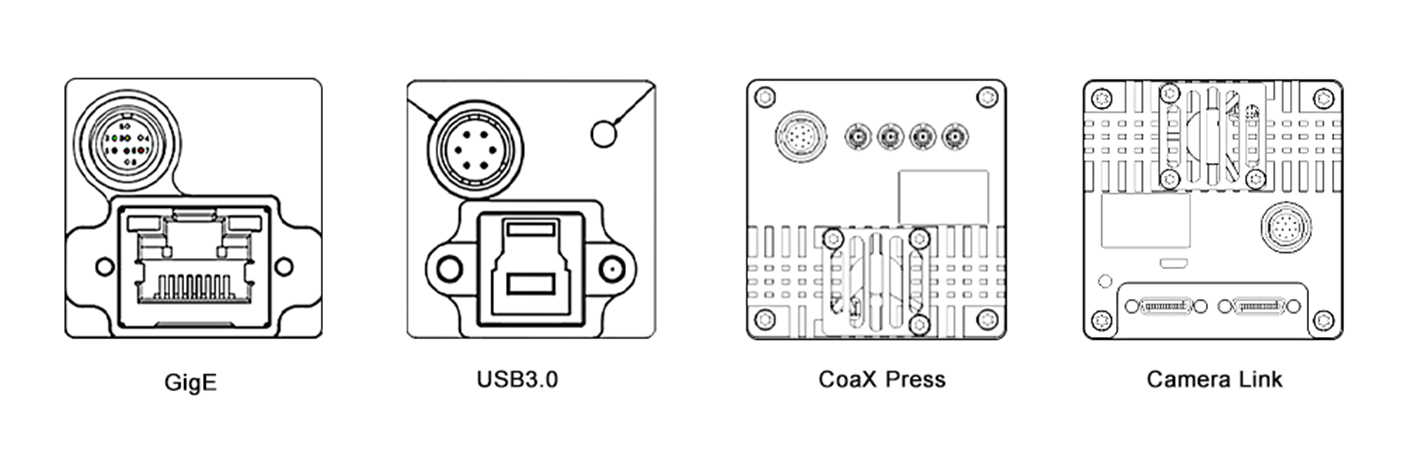
Pilihan format pemampatan mempengaruhi saiz data dan beban pemprosesan. Format terpampat seperti H.264 mengurangkan jalur data tetapi memerlukan penerokaan di hos. Format tanpa pemampatan menawarkan kesetiaan yang lebih tinggi tetapi mengambil lebih banyak sumber. Selain itu, jenis antaramuka kamera sangat penting. Antaramuka laju tinggi seperti GigE Vision dan CoaXPress membolehkan pemindahan data yang cekap untuk susunan pelbagai kamera, manakala antaramuka lama seperti USB 2.0 membataskan skala kerana jalur data terhad.
3. Perisian dan Saluran Pemprosesan
Ketepatan perisian adalah sama pentingnya, dengan dua kawasan ini menjadi kunci kepada prestasi sistem.
3.1 Sistem Operasi dan Alatan Perisian
Sistem operasi dan pemandunya membentuk asas perisian. Sistem operasi masa nyata (RTOS) meminimumkan latensi, sesuai untuk aplikasi seperti kawalan robotik. Sistem berbasa Linux popular kerana sokongan sumber terbuka. Pemandu yang diterajui meningkatkan prestasi peranti keras. Perisian penglihatan dan perpustakaan, seperti OpenCV, MATLAB, dan rangka kerja pembelajaran dalam seperti TensorFlow dan PyTorch, bervariasi dalam kecekapan komputasi. Sebagai contoh, hos yang menjalankan model YOLO dipercepat GPU mungkin menyokong kamera yang lebih sedikit berbanding satu yang menggunakan deteksi tepi asas disebabkan oleh kekompleksan yang lebih tinggi.

3.2 Pengaturcaraan Berjulat dan Pengoptimuman
Pemprosesan multithreading dan penselarasan secara efisien adalah kunci untuk memaksimumkan prestasi sistem. Multithreading membolehkan tugas berjalan serentak pada inti CPU, manakala penselarasan menggunakan GPU untuk pemprosesan data. Teknologi seperti OpenMP dan CUDA menyediakan kerangka untuk pelaksanaan. Dalam sistem pengawasan multikamera, OpenMP boleh membahagikan pemprosesan pemberian kamera di antara inti CPU, dan CUDA boleh mempercepatkan analisis imej di atas GPU, membolehkan penanganan lebih banyak kamera.
4. Kebutuhan Aplikasi
Ketrumusan tugas penglihatan menentukan alokasi sumber, dengan ketepatan masa dan kekompleksan pemprosesan sebagai penentu utama.
4.1 Pemprosesan Nyata vs. Pemprosesan Tidak Langsung
Aplikasi nyata, seperti kemudi autonomus dan automatik industri, memerlukan pemprosesan segera dengan latensi rendah, membataskan bilangan kamera yang boleh disokong oleh hos. Pemprosesan tidak langsung, seperti analisis video dalam batch, boleh menangani lebih banyak kamera tetapi memberikan hasil yang tertunda.
4.2 KeKompleksan Pemprosesan
Tugasan mudah seperti pengesanan gerakan memberi beban komputasi yang rendah, membenarkan hos untuk menyokong lebih banyak kamera. Tugasan kompleks seperti reka bentuk 3D atau pengenalan muka lanjutan memerlukan sumber yang besar, mengurangkan bilangan kamera yang disokong. Sebagai contoh, satu hos boleh menyokong 10 kamera untuk pengesanan gerakan tetapi hanya 3 untuk anggaran kedalaman 3D secara real-time.
5. Kerangka Anggaran
Gunakan langkah-langkah berikut untuk menganggarkan kapasiti kamera:
Takrifkan Parameter Kamera: Resolusi, kadar bingkai, pengecaman, dan antara muka.
Kira Jalur Data: Kadar Data Tidak Dikecilkiratkan = Resolusi × Kadar Bingkai × Kedalaman Bit / 8 (contohnya, 1080p pada 30 FPS = 1920×1080×30×24 / 8 = ~1.4 GB/s).
Nilaikan Had Perkakasan: Pastikan kuasa pemprosesan CPU/GPU ≥ jumlah jalur data × faktor kos tambahan pemprosesan (2–5× untuk tugasan kompleks).
Ujian dengan Prototaip: Gunakan alat benchmark (contohnya, Intel VTune, NVIDIA Nsight) untuk mengukur penggunaan sumber untuk sebuah kamera tunggal, kemudian skala secara linear (dengan penyesuaian untuk keuntungan/kerugian parallelisasi).
Kesimpulan
Bilangan kamera yang boleh disokong oleh satu hos dalam sistem penglihatan bukanlah nombor tetap tetapi keseimbangan antara keupayaan peranti keras, spesifikasi kamera, optimasi perisian, dan kekompleksan tugas. Untuk kebanyakan sistem, bermula dengan prototaip dan memperluas secara beransur-ansur sambil memantau penggunaan sumber adalah pendekatan yang paling boleh dipercayai. Sebagai hasil perkembangan pesat peranti keras (contohnya, GPU yang lebih pantas, pemecutan AI) dan perisian (contohnya, kerangka pengiraan tepi), keupayaan untuk menyokong lebih banyak kamera dengan prestasi yang lebih tinggi akan terus berkembang. Perkembangan ini akan membolehkan pembangunan penyelesaian penglihatan yang lebih canggih dan boleh diperluas, membuka peluang baru dalam pelbagai industri, dari kesihatan dan pengangkutan hingga keselamatan dan hiburan.
Artikel ini memberikan pemahaman dasar bagi para arsitek sistem dan insinyur, menekankan kebutuhan akan pengujian dan optimasi yang disesuaikan untuk memenuhi permintaan aplikasi tertentu. Dengan mempertimbangkan semua faktor yang terlibat, dimungkinkan untuk merancang sistem visi yang tidak hanya efisien tetapi juga mampu menangani tuntutan yang terus meningkat dari aplikasi modern.





