

Guia de Câmeras de Nível de Placa para Sistemas de Visão Embarcada
Para fabricantes de equipamentos originais (OEMs), integradores de sistemas e equipes de engenharia de visão embarcada, a câmera em nível de placa é o bloco construtivo fundamental de sistemas de visão embarcada compactos, confiáveis e de alto desempenho. Este guia abrangente detalha os critérios críticos de seleção, protocolos de interface, requisitos do ecossistema de software e melhores práticas de integração física para câmeras em nível de placa, auxiliando sua equipe de engenharia a otimizar projetos de visão embarcada para aplicações industriais, médicas, automotivas e de infraestrutura inteligente.
Principais Critérios de Seleção para Câmeras em Nível de Placa
Equilibrando o Desempenho do Sensor com Restrições de Potência e Térmicas
Seleção câmeras em nível de placa requer a otimização das capacidades dos sensores em relação aos orçamentos de potência e aos limites térmicos. Sensores de alta resolução (por exemplo, 12 MP ou mais) consomem 30–50% mais potência do que os equivalentes de 2–5 MP, gerando calor que compromete a confiabilidade em projetos sem ventilador. Sistemas industriais de visão implantados em espaços confinados beneficiam-se mais de sensores de baixo ruído que consomem <1 W, mantendo uma relação sinal-ruído (SNR) >40 dB. Os engenheiros devem validar o desempenho térmico utilizando imagens infravermelhas durante a fase de prototipagem — temperaturas sustentadas acima de 85 °C aceleram a degradação do sensor em 4× (Journal of Embedded Systems, 2023).

Adequação da Resolução, Taxa de Quadros e Faixa Dinâmica às Necessidades da Aplicação
O alinhamento preciso das especificações da câmera às exigências operacionais evita superdimensionamento e aumento de custos. Considere essas combinações críticas:
| Aplicação | Especificações Ótimas | Razão |
|---|---|---|
| Robótica de Pegar e Colocar | 5 MP a 60 fps, faixa dinâmica de 120 dB | Equilibra a velocidade de reconhecimento de peças com as condições variáveis de iluminação em armazéns |
| Endoscopia Médica | 1080p a 30 fps, faixa dinâmica >75 dB | Minimiza o borrão de movimento em cavidades com pouca iluminação, ao mesmo tempo que reduz a largura de banda de dados |
| Monitoramento de Tráfego | 4K @ 24 fps, WDR (140 dB) | Captura placas de licença ao amanhecer/ao entardecer sem artefatos de movimento |
Modos de alto alcance dinâmico (HDR) são essenciais em ambientes onde a iluminação varia, embora acrescentem uma latência de processamento de 15–20 ms. A seleção da taxa de quadros deve refletir a velocidade do objeto: inspeções em esteiras a 2 m/s exigem ≥120 fps para limitar o desfoque de movimento a menos de 0,5 pixel.
Protocolos de Interface para Integração Confiável de Câmeras no Nível de Placa
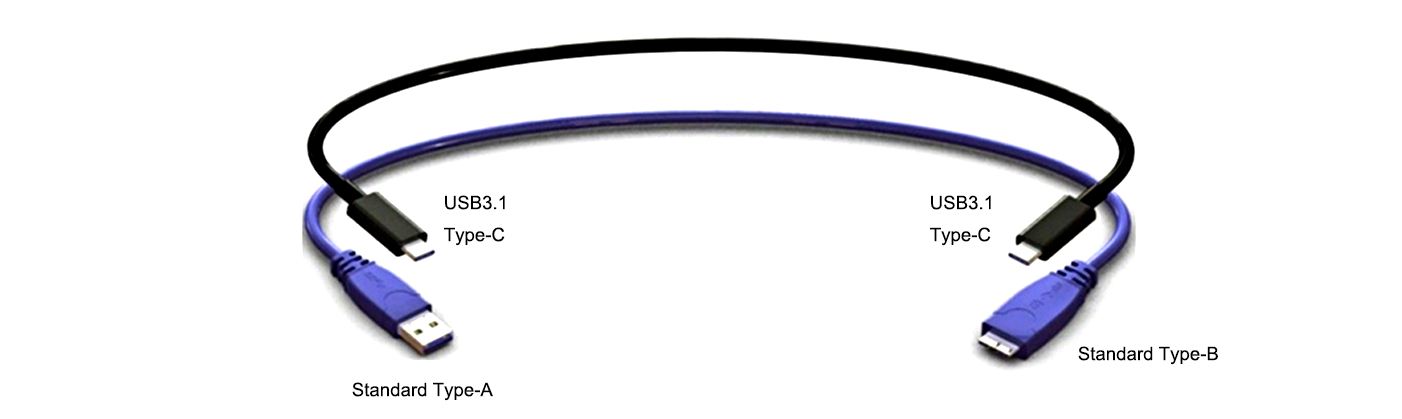
USB 3.1, MIPI CSI-2 e LVDS: Largura de Banda, Latência e Adequação à Aplicação Real
A seleção do protocolo de interface ideal para sua câmera em nível de placa exige um equilíbrio entre largura de banda, latência e restrições ambientais. O USB 3.1 oferece uma taxa de transferência de 5 Gbps com a simplicidade de conexão plug-and-play — ideal para imagens médicas ou quiosques, onde os comprimentos dos cabos permanecem abaixo de 3 metros. O MIPI CSI-2 fornece largura de banda escalável (até 6 Gbps por meio de 4 vias) e consumo de energia extremamente baixo, tornando-se o padrão de fato para sistemas móveis e embarcados baseados em ARM. O LVDS oferece imunidade superior a ruídos em ambientes eletricamente ruidosos, como automação industrial, embora sua largura de banda inferior a 1 Gbps limite casos de uso de alta resolução. Para robótica em tempo real, a latência sub-5 ms do MIPI CSI-2 supera a faixa de 10–20 ms do USB 3.1. Priorize os protocolos com base nas necessidades de implantação: USB 3.1 para prototipagem rápida, MIPI para dispositivos de borda com restrições de energia e LVDS para máquinas industriais.
Ecossistema de Software e Suporte a SDKs para Câmeras em Nível de Placa
SDKs multiplataforma (Spinnaker, Aravis) e compatibilidade com RTOS ARM/x86
Kits de desenvolvimento de software robustos (SDKs) são indispensáveis para acelerar a implantação de sistemas de visão com câmeras em nível de placa. Soluções multiplataforma, como Spinnaker e Aravis, fornecem interfaces padronizadas que abstraem as complexidades de hardware, permitindo a portabilidade de código entre ambientes de desenvolvimento e produção. O Spinnaker suporta diversas arquiteturas — incluindo x86, ARM e sistemas operacionais em tempo real (RTOS) — por meio de APIs unificadas, permitindo que engenheiros façam protótipos em desktops e implantes sem interrupções em alvos embarcados. Enquanto isso, frameworks de código aberto, como o Aravis, oferecem conformidade com o padrão GenICam independente do fornecedor para sistemas baseados em Linux. Essa flexibilidade arquitetural reduz os obstáculos de integração em 40%, segundo estudos sobre a adoção de visão embarcada (2023). Os principais fatores a considerar incluem compatibilidade com RTOS para latência determinística em controles industriais, suporte a múltiplas arquiteturas para proteger investimentos futuros contra migrações de hardware e camadas de abstração que simplifiquem o desenvolvimento de drivers. A compatibilidade com ambientes RTOS leves garante operação confiável em aplicações com restrições de recursos, como robôs móveis autônomos ou dispositivos médicos, onde a execução ininterrupta é imprescindível.
Integração Física: Fator de Forma, Montagem da Lente e Robustez Ambiental
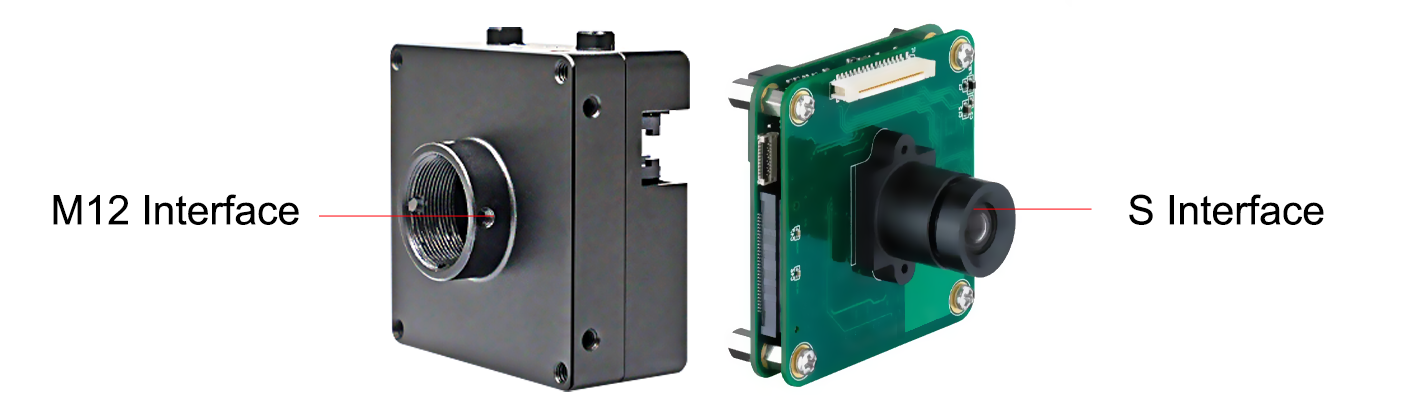
Interfaces M12, S-Mount e Personalizadas — Campo de Visão e Flexibilidade Óptica
As interfaces de montagem de lentes impactam diretamente o desempenho óptico em sistemas de visão embarcada. Os suportes padronizados M12 oferecem ajustes econômicos do campo de visão (FOV) para aplicações industriais, enquanto o S-Mount fornece soluções compactas para projetos com restrições de espaço. Interfaces personalizadas permitem atender requisitos especializados de FOV, como ângulos ultra-largos ou configurações telecêntricas. Fatores ópticos críticos incluem:
- Controle de distorção : distorção em barril < 0,1% mantém a precisão das medições em metrologia
- Estabilidade Mecânica : mecanismos de travamento evitam deslocamento do foco durante exposição a vibrações de 15G
- Sensibilidade no NIR : suporte ao comprimento de onda de 850 nm melhora o desempenho em condições de pouca luminosidade
- Resistência Ambiental : vedação classificada IP67 protege contra a entrada de partículas
Projeto Térmico e Conformidade EMC em Implantações Sem Ventilador e Sem Invólucro
O gerenciamento térmico torna-se crítico ao operar câmeras de nível de placa em ambientes sem ventilador com temperaturas superiores a 60 °C. Estratégias eficazes incluem espalhadores de calor em cobre capazes de dissipar cargas térmicas superiores a 5 W, materiais de interface termicamente estáveis que mantêm a integridade do sensor na faixa de –40 °C a 85 °C e otimização do layout da placa de circuito impresso (PCB) para isolar componentes geradores de calor dos sensores de imagem. A compatibilidade eletromagnética (EMC) garante operação confiável em ambientes industriais com ruído elétrico intenso. A conformidade exige o cumprimento de normas-chave:
| Exigência | Padrão | Aplicação Crítica |
|---|---|---|
| Emissões Irradiadas | FCC Parte 15 Classe B | Diagnósticos médicos |
| Imunidade | IEC 61000-4-3 | Montagem Automotiva |
| Proteção ESD | IEC 61000-4-2 | Processamento de alimentos |
Um aterramento adequado e invólucros blindados reduzem os riscos de interferência em 40 % em implantações sem invólucro (EMC Journal, 2023).
Pronto para otimizar seu sistema de visão embarcada com uma câmera personalizada de nível de placa?
A câmera em nível de placa é o núcleo de sistemas de visão embarcada confiáveis, compactos e de alto desempenho — nenhuma solução pronta para uso pode igualar a personalização, a eficiência energética e a flexibilidade de integração de um projeto de câmera em nível de placa desenvolvido sob medida para o fabricante original (OEM). Ao alinhar o desempenho do sensor, os protocolos de interface, o suporte de software e o fator de forma físico às suas exigências específicas de aplicação, você obterá um tempo menor para lançamento no mercado, redução dos custos da lista de materiais (BOM) e confiabilidade consistente a longo prazo, mesmo nos ambientes embarcados mais exigentes.

Para soluções industriais de câmeras em nível de placa adaptadas à sua aplicação OEM de visão embarcada, ou para construir um sistema de visão totalmente integrado com lentes complementares, iluminação e ferramentas de processamento de borda (como as oferecidas pela HIFLY), associe-se a um fornecedor com sólida experiência em visão industrial por máquina e personalização OEM. Os 15 anos de experiência da HIFLY abrangem o projeto de câmeras em nível de placa, fabricação personalizada completa OEM/ODM e integração ponta a ponta de sistemas de visão embarcada — respaldados pela certificação ISO 9001:2015, suporte à conformidade regulatória global e serviços dedicados de engenharia de design-in. Entre em contato conosco ainda hoje para uma consulta sem compromisso, prototipagem personalizada ou para projetar uma câmera em nível de placa otimizada para o seu projeto de visão embarcada.





