

Dicas de Integração de Câmeras de Nível de Placa para Engenheiros
Selecionando a Interface Adequada para Integração de Câmera em Nível de Placa
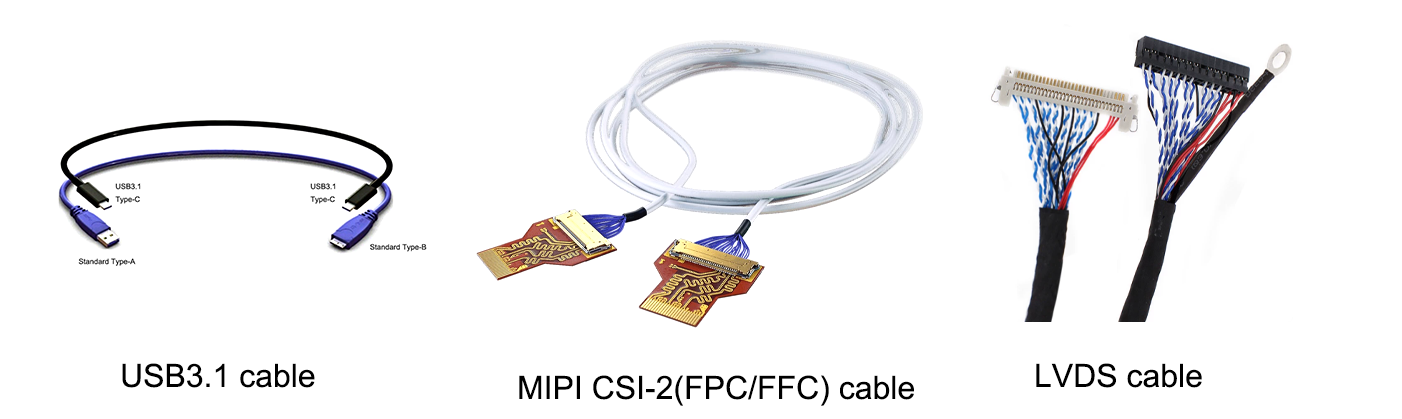
USB 3.1, MIPI CSI-2 e LVDS: Compromissos entre Largura de Banda, Latência e Sincronização em Tempo Real
Engenheiros embarcados enfrentam compromissos críticos ao selecionar interfaces para a integração de câmeras no nível da placa. O USB 3.1 oferece alta largura de banda (5 Gbps), tornando-o adequado para transmissão de vídeo em HD — porém, sua sobrecarga de protocolo introduz latência de 5–10 ms, limitando sua adequação para laços de controle em tempo real. O MIPI CSI-2 oferece largura de banda escalável (até 6 Gbps por canal) e sincronização acionada por hardware, permitindo latência inferior a um milissegundo e temporização precisa entre múltiplos sensores — ideal para automação industrial e robótica. O LVDS fornece transmissão determinística e de ultra-baixa latência (< 1 ms) por meio de protocolos seriais simples, embora sua largura de banda por canal esteja limitada a cerca de 655 Mbps, restringindo seu uso a fluxos de menor resolução ou comprimidos. Sistemas de visão que exigem sincronização rigorosa entre câmeras devem priorizar o MIPI CSI-2; aplicações críticas para a segurança, como a percepção em veículos autônomos, beneficiam-se da previsibilidade temporal do LVDS. O USB 3.1 permanece viável para monitoramento em HD em aplicações sensíveis ao custo e não em tempo real, desde que a latência mínima seja aceitável — desde que sejam validadas as restrições térmicas e de processamento.
Práticas Recomendadas para Integridade de Sinal e Projeto de PCB por Interface
A integridade do sinal é específica à interface e fundamental para um desempenho confiável da câmera no nível da placa. Para USB 3.1, mantenha uma impedância diferencial de 90 Ω com pares de trilhas de comprimento igualado (±5 mil), roteamento blindado por terra e separação rigorosa em relação às trilhas digitais ruidosas, a fim de suprimir interferências eletromagnéticas (EMI). O MIPI CSI-2 exige uma impedância de 100 Ω por lane diferencial, igualação de comprimento dentro de ±10 mil e evitação de vías próximas aos receptores — especialmente crítico para lanes de alta velocidade operando acima de 1,5 Gbps. Os layouts LVDS exigem trilhas curtas (<10 polegadas), impedância consistente de 100 Ω e trilhas de proteção (guard traces) para suprimir diafonia. Em todas as interfaces, particione os planos de terra para isolar os circuitos analógicos do sensor das regiões digitais do ISP e do processador, posicione capacitores de desacoplamento a menos de 2 mm dos pinos de alimentação e utilize estruturas de camadas com 4 ou mais camadas, com planos de referência contínuos. O roteamento inadequado é responsável por 32 % dos artefatos de imagem em sistemas de visão prototípicos — tornando a simulação pós-roteamento e a validação de impedância obrigatórias em projetos críticos para a missão.
Integração Mecânica: Montagem da Lente e Flexibilidade Óptica
A montagem precisa da lente é essencial: desalinhamentos em escala micrométrica causam desvio de foco, distorção ou perda de resolução. Os engenheiros devem equilibrar a rigidez mecânica — crítica para resistência a choques e vibrações — com a ajustabilidade in loco, normalmente alcançada por meio de barris roscados ou suportes baseados em calços. A flexibilidade óptica exige compatibilidade entre diversos tipos de lentes (foco fixo, varifocal, líquida) e suporte ao ajuste da distância focal por meio de mecanismos helicoidais ou controladores motorizados. As diferenças de expansão térmica entre lentes e sensores exigem mitigação — utilizando materiais com baixo coeficiente de dilatação térmica (CTE), como Invar ou compósitos cerâmicos, ou suportes cinemáticos — especialmente em ambientes industriais (-40 °C a +85 °C). Para imagens infravermelhas ou multiespectrais, a transparência do material do substrato na faixa espectral-alvo (por exemplo, germânio para LWIR, sílica fundida para UV) torna-se uma restrição de projeto de primeira ordem. Interfaces modulares de lentes permitem trocas rápidas sem necessidade de recalibração completa, mas as tolerâncias da distância do flange devem permanecer abaixo de 10 µm para evitar vignetting ou degradação da MTF.

Garantindo a Coexistência Robusta no Nível de Sistema em Projetos de Câmera no Nível de Placa
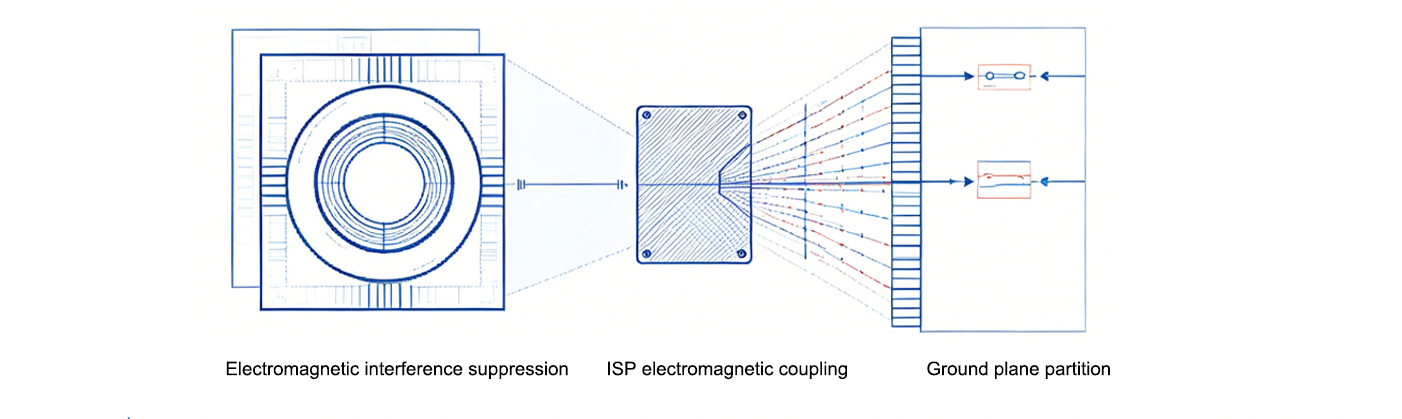
Atenuação de EMI e Particionamento do Plano de Terra para Coexistência entre Sensor e ISP
Projetos de câmeras em nível de placa sem invólucro carecem do blindagem contra EMI dos módulos fechados, atribuindo maior responsabilidade ao isolamento em nível de PCB entre sensores de imagem e ISPs. Planos de terra particionados — que separam os domínios analógicos dos sensores dos subsistemas digitais do ISP — são essenciais para minimizar o acoplamento de ruído conduzido, pois a interferência em sistemas mistos pode introduzir harmônicos de clock superiores a 50 dBμV/m (IEC 61000-4-3). Estratégias eficazes incluem a conexão à terra em ponto estrela na entrada de alimentação, trilhas de proteção com furos de ligação (stitching vias) ao redor das redes digitais de alta velocidade, evitar relieves térmicos em áreas preenchidas com terra próximas aos sensores e adicionar pérolas de ferrite nas linhas de clock do barramento I²C. A integridade do sinal degrada rapidamente quando a distância entre sensor e ISP cai abaixo de 3λ da frequência operacional mais elevada — exigindo roteamento com impedância controlada e pares diferenciais com comprimentos iguais. A prototipagem inicial com sondas de EMI de campo próximo (espaçamento de 5 mm) identifica pontos críticos; o blindagem localizada com liga mu-metal sobre os sensores reduz as emissões irradiadas em 12–18 dB (FCC OET-65). Manter uma distância mínima de 40 mil entre domínios de sinais mistos melhora consistentemente a relação sinal-ruído (SNR) em 20% em módulos de alta resolução.
Integração de Software e Portabilidade de SDK para Câmeras em Nível de Placa
Suporte a Drivers Multiplataforma: Linux RT, QNX e RTOS Bare-Metal com Spinnaker
A portabilidade de software multiplataforma é indispensável para implantações de visão embarcada que abrangem ambientes Linux em tempo real (RT), QNX e sistemas operacionais em tempo real (RTOS) bare-metal com restrições de recursos. Cada sistema operacional impõe requisitos distintos de temporização, memória e modelo de drivers — contudo, a aquisição de pixels perfeita e a sincronização acionada por hardware devem ser preservadas de forma consistente. Uma camada de abstração de SDK unificada preenche essa lacuna: o SDK Spinnaker, por exemplo, fornece APIs padronizadas para plataformas x86, ARM e RISC-V, suportando nativamente a captura de quadros em tempo real, o acionamento por hardware e o acesso aos registradores do processador de imagem (ISP). Isso elimina o desenvolvimento redundante de drivers ao migrar de PCs industriais com Linux RT para alvos baseados em microcontroladores com RTOS. As equipes que utilizam tais frameworks reduzem o tempo de integração em até 40%, mantendo comportamento determinístico — mesmo sob condições de redução térmica ou escalonamento de tensão.
Pronto para simplificar sua integração de câmera em nível de placa para produção OEM?
Sem Costura integração de câmera em nível de placa é a pedra angular de sistemas confiáveis de visão embarcada de alto desempenho — nenhum algoritmo avançado ou hardware de processamento pode superar uma má seleção de interface, falhas na integridade do sinal ou um projeto mecânico não otimizado. Ao seguir as melhores práticas de integração comprovadas em campo e ao estabelecer parceria com um fornecedor de câmeras que ofereça hardware pré-validado, suporte com projetos de referência e ferramentas de software multiplataforma, você reduzirá iterações de projeto, acelerará o tempo de lançamento no mercado e alcançará desempenho consistente e economicamente viável na produção em volume para fabricantes de equipamentos originais (OEM).
Para soluções industriais de câmeras em nível de placa adaptadas à sua aplicação de visão embarcada, ou para acessar pacotes completos de projetos de referência, suporte técnico interno e serviços personalizados de fabricação OEM (como os oferecidos pela HIFLY), parcele-se com um fornecedor com sólida experiência em visão industrial por máquina. Os 15 anos de experiência da HIFLY abrangem o projeto de câmeras em nível de placa, personalização completa OEM/ODM e integração de ponta a ponta de sistemas de visão embarcada — respaldados pela certificação ISO 9001:2015, suporte à conformidade regulatória global e serviços dedicados de engenharia para integração no projeto. Entre em contato conosco ainda hoje para uma consulta sem compromisso, prototipagem personalizada ou para otimizar seu fluxo de trabalho de integração de câmeras em nível de placa.





