

Dicas para Selecionar a Câmera de Varredura de Linha Adequada
Fundamentos das Câmeras de Varredura por Linha: Arquitetura, Princípio e Principais Vantagens
Como a captura de imagens por linha difere da captura por área — eliminando o desfoque de movimento e permitindo resolução vertical infinita
As câmeras de varredura por área capturam imagens 2D completas de uma só vez, enquanto as câmeras de varredura por linha funcionam de forma diferente. Elas possuem apenas uma linha de pixels que constrói as imagens gradualmente à medida que os objetos passam pelo campo de visão da câmera. O sistema sincroniza-se com o movimento utilizando dispositivos como codificadores rotativos ou lineares, de modo que não ocorre desfoque mesmo quando os objetos se movem muito rapidamente, às vezes a mais de 10 metros por segundo. O fator mais importante aqui é que a resolução vertical, essencialmente, pode ser ilimitada. A altura da imagem obtida depende exclusivamente da distância percorrida pelo objeto ao passar pela câmera, não estando limitada pelo tamanho físico do sensor. Por essa razão, a tecnologia de varredura por linha destaca-se em tarefas precisas, como a inspeção de semicondutores durante a fabricação ou o rastreamento de grandes bobinas metálicas com 3.000 mm de largura. Os sistemas tradicionais de varredura por área simplesmente não conseguem lidar com essas situações sem gerar imagens enormes compostas por mosaicos ou sem perder detalhes importantes no processo.
Componentes principais explicados: sensor linear, motor de taxa de linha, interface de codificador e lógica de sincronização em tempo real
Quatro componentes interdependentes possibilitam essa precisão:
- Sensores Lineares , normalmente matrizes CMOS ou CCD com 1–16 mil pixels ativos, definem a resolução horizontal e a resposta espectral.
- Motores de taxa de linha processam dados de pixels em taxas de 10–140 kHz, ajustando dinamicamente a velocidade do objeto à frequência de amostragem.
- Interfaces de codificador convertem movimento mecânico em sinais de disparo precisos — alcançando sincronização de velocidade com precisão de ±0,01% por meio da decodificação em quadratura.
- Lógica de sincronização em tempo real compensa oscilações induzidas por vibrações ou variações transitórias de velocidade, mantendo o registro subpixel ao longo de varreduras contínuas.
Em conjunto, esses elementos suportam imagens livres de distorção de superfícies cilíndricas, rolos contínuos (webs) e materiais termicamente instáveis — capacidades fundamentalmente indisponíveis para arquiteturas baseadas em área.
Correspondência Precisa da Taxa de Linha, Velocidade de Movimento e Resolução Espacial
A equação fundamental: Δx = v / fline — e como aplicá-la para a calibração de pixel para milímetro
Obter medições espaciais precisas na aquisição de imagens por varredura de linha depende fundamentalmente de quão bem a velocidade do objeto (v) se alinha com a taxa de linhas da câmera (fline). No cerne desse processo está esta fórmula básica: delta x = v / fline, que indica a distância real representada por cada pixel. Suponha, por exemplo, que uma esteira transportadora se mova a 500 milímetros por segundo e que a câmera esteja configurada para 10 quilohertz. Esse cálculo resulta em uma resolução de aproximadamente 0,05 milímetro por pixel. Durante a calibração desses sistemas, obter medições confiáveis de velocidade é extremamente importante. A maioria dos profissionais recorre a velocímetros a laser Doppler para essa finalidade e, em seguida, ajusta a taxa de linhas até atingir o valor desejado de delta x. E atenção às variações: se ocorrerem desvios superiores a ±2%, os erros começam a se manifestar em aplicações críticas, como a verificação da largura das trilhas em placas de circuito impresso, nas quais a precisão é essencial.
Sincronização baseada em codificador: garantindo o registro subpixel em ambientes de alta vibração ou velocidade variável
Quando as máquinas vibram ou suas velocidades mudam inesperadamente, isso causa problemas de sincronização que tornam as imagens menos nítidas e as medições mais difíceis de repetir de forma consistente. Ao sincronizar o codificador com a realimentação de posição do sistema de movimento, podemos definir com precisão o momento em que as imagens são capturadas. Isso significa que, mesmo se as velocidades variarem até 15%, ainda obtemos registros em nível subpixel, essenciais para o controle de qualidade. Os números também falam por si: codificadores rotativos conseguem medir ângulos com precisão de até 0,001 grau, enquanto os lineares rastreiam posições com uma exatidão de apenas 1 micrômetro. Essas capacidades fazem toda a diferença em ambientes industriais desafiadores. Pense, por exemplo, em usinas siderúrgicas, onde tudo vibra constantemente, ou em fábricas têxteis, onde a tensão muda momento a momento. Com a sincronização adequada dos codificadores, os sistemas identificam defeitos reais, em vez de descartar produtos bons por engano. Estudos mostram que essa abordagem reduz as rejeições falsas em cerca de 40% em comparação com métodos anteriores que operavam livremente, sem quaisquer pontos de disparo.

Critérios de Seleção Orientados por Aplicação para Casos de Uso Industriais Comuns
Inspeção web: gerenciamento da variação de tensão, continuidade de costura e localização em tempo real de defeitos
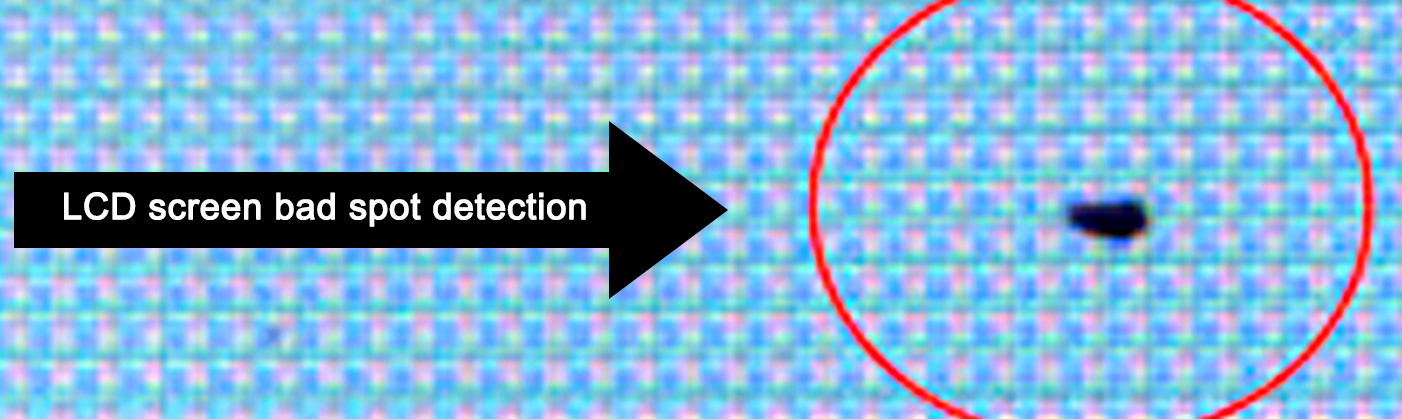
Ao trabalhar com materiais contínuos em forma de rolo, como papel, filmes plásticos, folhas metálicas ou tecidos, a escolha das câmeras de varredura linear adequadas baseia-se em três principais considerações que têm maior relevância no chão de fábrica. O primeiro desafio refere-se às variações de velocidade causadas por alterações na tensão ao longo do processo. Para lidar com isso, os sistemas necessitam de controladores adaptativos operando a pelo menos 20 quilohertz, juntamente com laços de realimentação por codificador, de modo que as imagens permaneçam alinhadas pixel a pixel em toda a largura. Em segundo lugar, unir essas imagens sem lacunas entre as linhas exige uma sobreposição cuidadosa dos arranjos de pixels. Normalmente, os fabricantes visam uma sincronização superior a um microssegundo para manter a continuidade nos resultados finais de inspeção. Em terceiro lugar, a detecção de defeitos à medida que ocorrem depende fortemente da capacidade de processamento embarcada. Muitos sistemas modernos utilizam atualmente circuitos integrados FPGA para acelerar tarefas básicas de análise de imagem, como detecção por limiar, permitindo identificar problemas em apenas cinco milissegundos antes que os produtos sejam rejeitados. Pesquisas recentes de 2023 demonstraram como a substituição da tecnologia de câmeras de matriz por câmeras de varredura linear melhorou as taxas de detecção de defeitos em quase 92%, quando operando em velocidades de linha de oito metros por segundo — o que explica por que um número crescente de conversores está adotando essa mudança atualmente.
Varredura de peça cilíndrica: mapeamento de resolução angular, alinhamento do codificador rotativo e armadilhas de distorção do campo de visão
Ao lidar com componentes rotativos, como garrafas, rolamentos ou eixos de automóveis, a resolução angular desempenha um papel fundamental na escolha do sensor adequado para a tarefa. A fórmula básica tem mais ou menos o seguinte aspecto: N é igual a pi multiplicado pelo diâmetro, dividido por RPM vezes 60 vezes a resolução espacial exigida. Obter esses valores corretamente é essencial, pois codificadores rotativos mal alinhados podem causar problemas. Em cerca de metade dos casos, esses desalinhamentos provocam distorção radial acima de 15%, razão pela qual muitos técnicos verificam inicialmente sua configuração utilizando sinais em quadratura. Outro fator a observar é a distorção óptica. Lentes convencionais tendem a distorcer imagens nas bordas curvas, gerando o que se denomina distorção em barril. É por isso que algumas aplicações optam por ópticas telecêntricas, que mantêm os erros de medição abaixo de 0,1% em toda a área de visualização. Nas inspeções de eixos automotivos, onde o ofuscamento representa um problema, a migração de sensores de 8 bits para 12 bits faz uma grande diferença. A maioria das oficinas relata uma redução de aproximadamente 70% nas leituras incorretas após essa atualização, embora os resultados possam variar conforme as condições específicas.
Câmera de Varredura Linear vs. Câmera de Varredura de Área: Quando Escolher Cada Uma para um ROI Ótimo
Cinco cenários decisivos em que uma câmera de varredura linear oferece desempenho incomparável e eficiência de custo
Embora as câmeras de varredura de área continuem sendo ideais para objetos discretos, estáticos ou de baixa velocidade, a tecnologia de varredura linear proporciona desempenho superior — e um ROI mais robusto — em cinco contextos industriais de alta produtividade:
- Inspeção de rolos contínuos em alta velocidade (papel, folhas metálicas, filmes), onde o borrão de movimento compromete a precisão da varredura de área; a varredura linear captura fatias unidimensionais livres de distorção a mais de 70 kHz, permitindo imagens contínuas em escala quilométrica.
- Monitoramento de tiras metálicas durante laminação a quente, onde a deriva térmica e as vibrações estruturais exigem aquisição sincronizada com codificador para manter o registro subpixel.
- Produção têxtil inspeção de tecidos
- inspeção 360° de peças cilíndricas rotativas , onde o mapeamento de resolução angular permite a detecção de defeitos em nível de micrômetro a velocidades superiores a 2.000 RPM.
- Varredura de grande área (painéis solares, compósitos aeroespaciais), onde a varredura por linha elimina a necessidade de alinhamento e calibração dispendiosos de múltiplas câmeras.
Nessas aplicações, os sistemas de varredura por linha reduzem os custos de hardware e integração em 30–60%, ao mesmo tempo que diminuem em cerca de 15% as rejeições falsas — frequentemente causadas por artefatos de movimento em sistemas de varredura por área. Sua escalabilidade e arquitetura com único sensor proporcionam retorno sobre o investimento (ROI) em 8–12 meses em ambientes de manufatura de alta produtividade.

Pronto para selecionar a câmera de varredura por linha certa para sua aplicação industrial?
A câmera de varredura por linha adequada é a base de uma inspeção industrial confiável e de alta velocidade — nenhum algoritmo ou software pode compensar uma câmera inadequada à velocidade da linha, às necessidades de resolução ou ao ambiente de produção. Ao alinhar a taxa de varredura, a resolução do sensor, a sincronização com codificador e o projeto óptico à sua aplicação específica, você vai desbloqueie inspeções contínuas e precisas na escala de mícrons, reduza rejeições falsas e obtenha um retorno sobre o investimento (ROI) mensurável para sua operação de manufatura.
Para soluções industriais de câmeras de varredura de linha personalizadas às suas aplicações de inspeção de tiras contínuas, varredura cilíndrica ou imagens em grande formato, ou para desenvolver um sistema completo de visão computacional com iluminação complementar, lentes e ferramentas de sincronização com codificador (como oferecidas pela HIFLY), associe-se a um fornecedor com sólida experiência em visão computacional industrial. HIFLY 15 anos de experiência abrangem câmeras de varredura de linha de alta velocidade com interface 10 GigE e resolução 8K, sistemas de imagem multiespectral e soluções completas de inspeção industrial — respaldados pela certificação ISO 9001:2015, mais de 30 patentes de invenção e suporte a mais de 2.500 clientes em mais de 30 países. Entre em contato conosco ainda hoje para uma consulta sem compromisso e selecione a câmera de varredura de linha ideal para sua operação.





