

Visão Computacional no Reconhecimento de Placas
Na era do avanço rápido da tecnologia, a visão computacional tornou-se um componente essencial de sistemas inteligentes, revolucionando indústrias ao permitir que máquinas "vejam" e interpretem dados visuais. Entre suas aplicações, o reconhecimento de placas (LPR) é uma das mais práticas, transformando a captura de placas em uma ferramenta que agiliza o gerenciamento de tráfego, aumenta a segurança e impulsiona o desenvolvimento de cidades inteligentes.
1. O Princípio da Visão Computacional no Reconhecimento de Placas
Aquisição de imagem
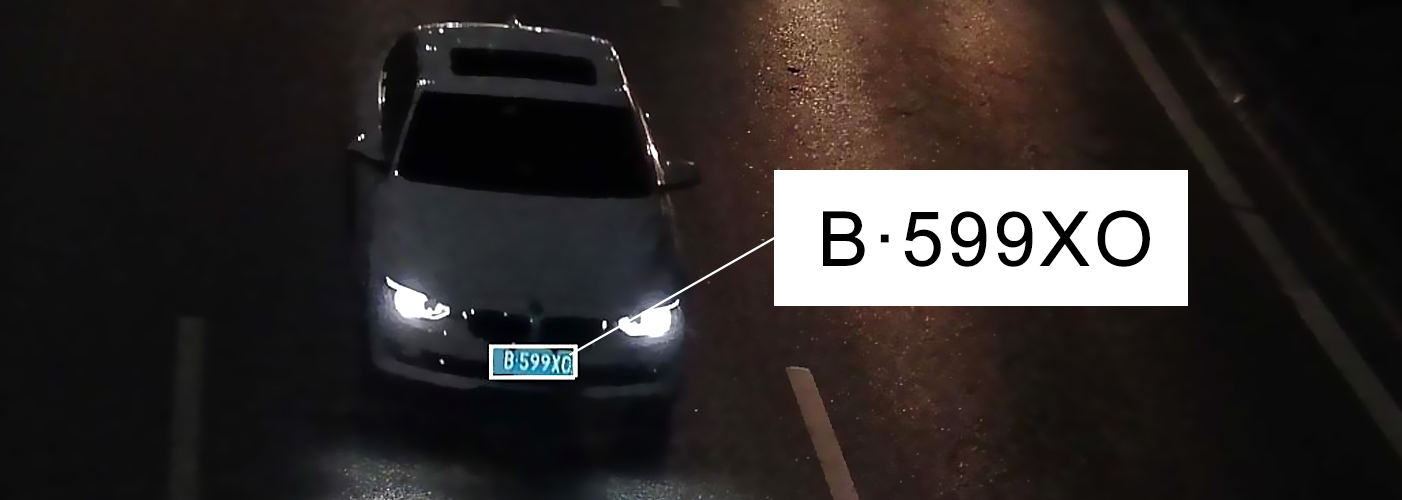
Como base do LPR, a aquisição de imagens utiliza câmeras de alta definição (2–8 megapixels) e sensores especializados instalados em locais estratégicos (cruzamentos, entradas de estacionamentos). Esses dispositivos são calibrados quanto à velocidade do obturador, abertura e ISO para capturar imagens nítidas dos veículos, garantindo que as placas sejam distinguíveis para o processamento subsequente.

Pré-processamento de Imagem
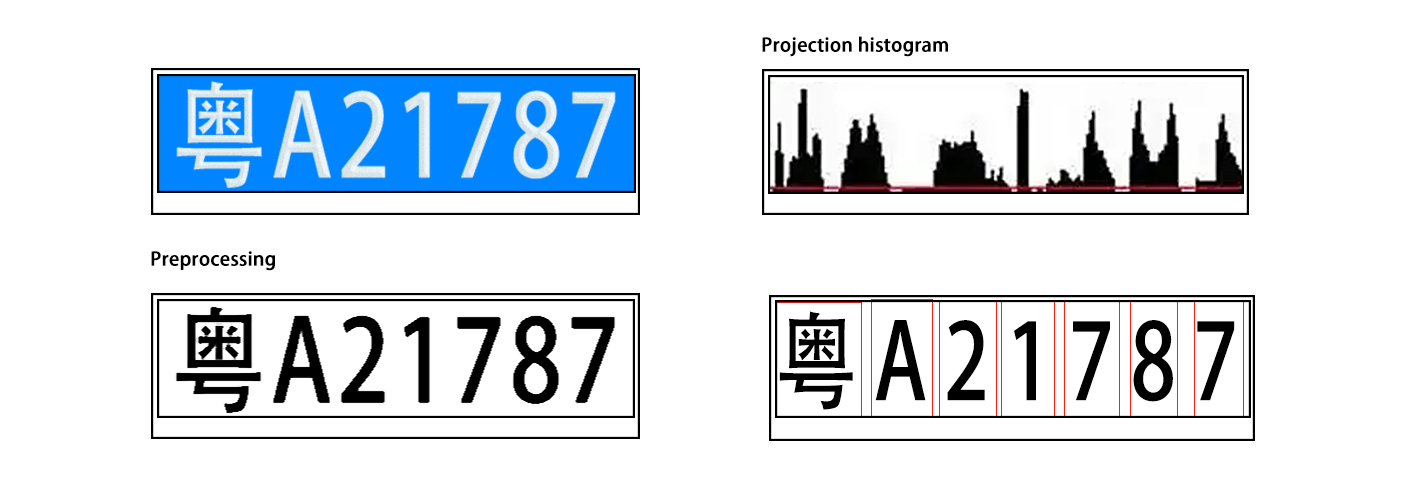
Imagens brutas de veículos frequentemente apresentam ruído, luminosidade irregular e baixo contraste. O pré-processamento corrige isso por meio da conversão para escala de cinza (simplificando os dados enquanto preserva a estrutura da placa), redução de ruído (filtros Gaussiano/mediana) e realce de contraste (equalização de histograma), tornando os detalhes da placa mais nítidos para localização.
Localização da Placa de Licença
Esta etapa isola a placa de licença das imagens do veículo usando suas características únicas: forma (retângulo padrão com proporção fixa), cor (por exemplo, azul-branco para carros civis na China) e textura. A detecção de bordas (Canny) e a segmentação por cor atuam em conjunto para recortar a área da placa, eliminando elementos irrelevantes.
Segmentação de Caracteres
Para preparar o reconhecimento, a segmentação de caracteres divide os caracteres da placa em imagens individuais. Utiliza projeção horizontal (faixa vertical dos caracteres) e projeção vertical (detectando espaços entre os caracteres). Aplica-se correção de inclinação para placas tortas, garantindo a separação precisa de cada caractere.
Reconhecimento de Caracteres
A etapa principal utiliza Reconhecimento Óptico de Caracteres (OCR, comparação baseada em modelos) ou aprendizado profundo (CNNs, aprendizado automático a partir de conjuntos de dados). Cada caractere segmentado é processado, convertido em texto e combinado em um número completo da placa do veículo.
2. Aplicações da Visão Computacional no Reconhecimento de Placas
Gestão do tráfego
Sistemas de LPR em cruzamentos e rodovias monitoram veículos, reconhecem placas e as associam a dados de infrações. Eles capturam as placas, registram horário/local da infração e enviam as informações para plataformas de gestão, reduzindo o trabalho manual e melhorando a segurança viária.
Gestão de estacionamentos
O LPR automatiza operações de estacionamento: câmeras capturam as placas nas entradas (registrando horário de entrada e abrindo cancelas) e nas saídas (calculando duração, gerando tarifas para pagamento sem dinheiro). Isso reduz tempos de espera e elimina problemas relacionados a tickets.
Cobrança de Pedágio
Em rodovias e túneis, o OCR permite a cobrança de pedágio sem parada. Ele reconhece as placas, verifica o registro, deduz as taxas automaticamente para veículos registrados (reduzindo o tempo de transação para menos de 1 segundo) e gera cobranças para os não registrados, aliviando congestionamentos.

Segurança e Vigilância
Integrado a câmeras em áreas públicas, o OCR escaneia placas e as compara com listas de vigilância (veículos roubados, suspeitos). Ele alerta o pessoal de segurança ao identificar correspondências, permitindo resposta rápida e aumentando a segurança pública.
3. Vantagens da Visão Computacional no Reconhecimento de Placas
Alta Eficiência
A visão computacional processa centenas de imagens por minuto, com tempos de reconhecimento entre 0,1 e 0,5 segundos por veículo. Diferentemente de operadores manuais, mantém um fluxo constante, reduzindo custos e melhorando o serviço.
Alta Precisão
Algoritmos avançados e inteligência artificial permitem mais de 99% de precisão em condições ideais e mais de 95% em ambientes desafiadores — muito superior ao reconhecimento manual (taxa de erro acima de 5%). Isso garante confiabilidade na cobrança de pedágios e na segurança.
funcionamento 24/7
Equipado com sensores de pouca luz e câmeras resistentes às intempéries, o LPR funciona sem parar. Iluminação infravermelha/LED auxilia na captura noturna, e algoritmos de aprimoramento reduzem o impacto das condições climáticas, garantindo operação ininterrupta.
Gestão e Análise de Dados
Os resultados do reconhecimento (número da placa, horário, localização, imagens) são armazenados em um banco de dados centralizado para busca rápida. Os dados são analisados para identificar tendências — otimizando sinais de trânsito, ajustando preços de estacionamento ou rastreando veículos suspeitos.
4. Desafios e Soluções no Reconhecimento Automático de Placas Baseado em Visão Computacional
Desafiadores
Condições climáticas extremas (chuva, neblina, reflexos), mudanças na iluminação e placas desgastadas reduzem a precisão para <80% em casos graves, afetando a confiabilidade.

Cenários Complexos de Veículos
Oclusão (placas bloqueadas), inclinação/distorção e cenários com múltiplas placas prejudicam o reconhecimento, já que algoritmos tradicionais têm dificuldade com entradas não padronizadas.
Soluções e Aprimoramentos
A otimização de hardware (câmeras HDR, iluminação infravermelha) e aprimoramentos de algoritmos (redução adaptativa de ruído, remoção de névoa) resolvem problemas ambientais. A correção de inclinação, o tratamento de oclusão e o aprendizado profundo (CNN baseadas em regiões) lidam com cenas complexas. Manutenção regular e atualizações mantêm os sistemas precisos.
5. Tendências Futuras da Visão Computacional no Reconhecimento de Placas
Integração de Aprendizado Profundo e Inteligência Artificial
Modelos avançados (transformadores, aprendizado com poucos exemplos) lidam com casos difíceis (placas desgastadas). Sistemas end-to-end de RPL (uma única rede neural para todas as etapas) simplificam o design, e a IA prevê o comportamento do veículo para uma gestão proativa.
Fusão Multissensorial
O RPL integrará LiDAR (dados tridimensionais do veículo), radar (velocidade/distância) e câmeras térmicas (condições de escuridão/fumaça). A fusão de dados reduz erros, tornando os sistemas mais robustos para uso off-road e emergencial.
Serviços Baseados em Nuvem
O ALP baseado em nuvem oferece escalabilidade (adicionar câmeras sem atualizações de hardware), gerenciamento remoto e integração entre sistemas (compartilhamento de dados com plataformas de cidades inteligentes). O armazenamento em nuvem suporta análises de longo prazo para aplicações em larga escala.
6. Conclusão
A visão computacional é a base do ALP moderno, resolvendo problemas de sistemas manuais com velocidade, precisão e operação 24/7. Avanços no aprendizado profundo, fusão multisensorial e tecnologia em nuvem superam desafios. Com o crescimento das cidades inteligentes, o ALP desempenhará um papel fundamental na conexão entre veículos, infraestrutura e usuários, moldando o transporte inteligente.





