

A Aplicação de Câmeras de Visão Artificial em Projetos de Reconhecimento de Placas de Licença
As câmeras de visão computacional são o núcleo dos sistemas de reconhecimento automático de placas (LPR), determinando a precisão ao capturar imagens de alta qualidade das placas veiculares. Este artigo aborda brevemente sua seleção, coordenação com software e otimização prática para projetos LPR.
1. Seleção da Câmera: A Base do LPR
Câmeras de visão computacional específicas para LPR exigem imagens em alta definição e forte adaptabilidade ambiental. Os critérios principais incluem resolução (2 megapixels para curtas distâncias, 4–5 megapixels para longas distâncias), taxa de quadros (15–30 FPS para baixa velocidade, 30–60 FPS para alta velocidade) e desempenho em condições de pouca luz (sensibilidade ≤ 0,01 lux, WDR ≥ 120 dB, iluminação infravermelha integrada).
As lentes devem corresponder à distância de captura (8–12 mm para curtas distâncias, 12–25 mm para longas distâncias, lentes zoom para cenários variáveis), com um ângulo entre câmera e veículo ≤ 30°. Interfaces como Gigabit Ethernet (para longas distâncias) e USB 3.0 (para pequena escala), além do suporte a GenICam, simplificam a integração do sistema.
2. Coordenação com Software: Concretizando o Reconhecimento Inteligente
As câmeras de visão computacional fornecem dados de imagem, e o software de reconhecimento automático de placas (LPR) forma um ciclo fechado por meio de pré-processamento (otimização da qualidade da imagem), posicionamento (localização das placas de licença), segmentação (separação dos caracteres), reconhecimento (conversão de imagens em texto) e saída de dados.
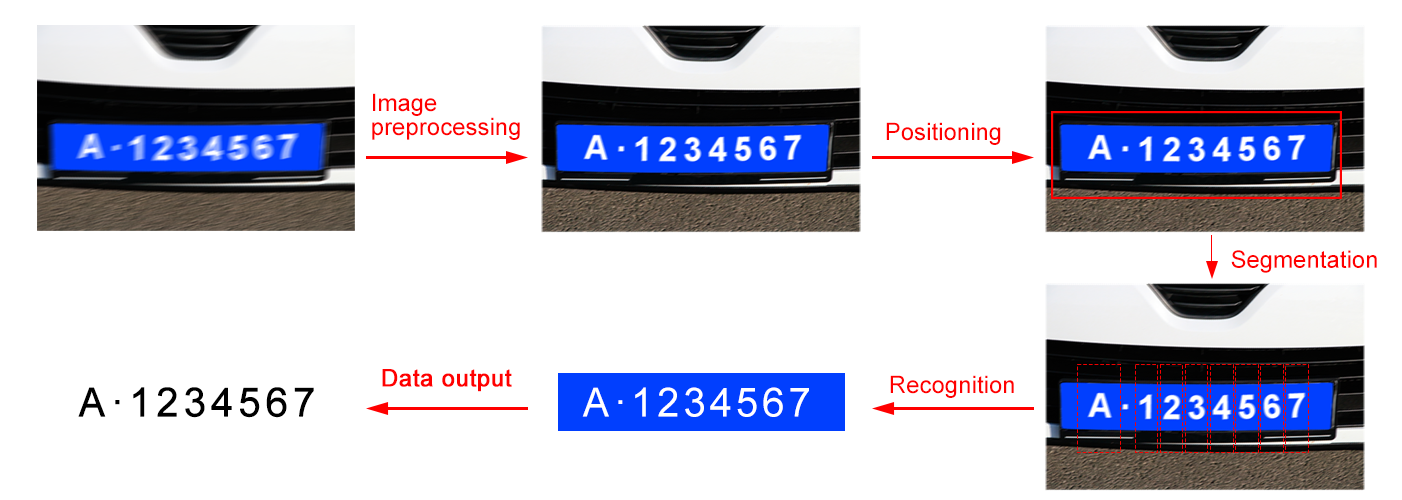
O desempenho do software está intimamente ligado à qualidade da câmera: imagens mais nítidas reduzem a dificuldade do pré-processamento e melhoram a precisão do reconhecimento, enquanto altas taxas de quadros da câmera permitem comparação entre múltiplos quadros para resultados mais estáveis, integrando-se a sistemas de nível superior para aplicação prática.
3. conclusão
Em resumo, as câmeras de visão computacional são fundamentais para a operação estável e eficiente de projetos de reconhecimento automático de placas (LPR), sendo a sua seleção (com foco em resolução, taxa de quadros, desempenho em condições de iluminação, lentes e interfaces) e a coordenação com o software fatores mutuamente reforçadores. Quanto ao preço, ele varia conforme as especificações da câmera: modelos básicos de 2 megapixels são economicamente vantajosos para pequenos estacionamentos, enquanto câmeras de alto desempenho de 4–5 megapixels, com funções avançadas, são mais adequadas para cenários de alta exigência, como rodovias, equilibrando custo e requisitos do projeto para alcançar resultados ótimos na aplicação de LPR.





