

Namigi za izbiro pravilne kamere za črtno skeniranje
Osnove črtnih skenerjev: arhitektura, načelo in ključne prednosti
Kako se črtno zajemanje slike razlikuje od površinskega zajemanja—odpravlja zamazanost zaradi gibanja in omogoča neskončno navpično ločljivost
Kamere za površinsko skeniranje zajamejo celotne dvodimenzionalne slike hkrati, medtem ko delujejo kamere za črtno skeniranje drugače. Imajo le eno vrstico pikslov, ki postopoma zgradijo slike, ko predmeti potujejo prek vidnega polja kamere. Sistem se sinhronizira z gibanjem z uporabo naprav, kot so rotacijski ali linearni kodirniki, zato ni razmazanosti, tudi kadar se stvari premikajo zelo hitro – včasih celo več kot 10 metrov na sekundo. Ključno je, da navpična ločljivost teoretično nima meje. Višina slike je odvisna izključno od razdalje, ki jo predmet prepotuje mimo kamere, ne pa od velikosti samega senzorja. Zato se tehnologija črtnega skeniranja izjemno dobro obnese pri natančnih nalogah, kot so preverjanje polprevodnikov med proizvodnjo ali sledenje ogromnim kovinskim tuljavam širokim 3.000 mm. Tradicionalni sistemi za površinsko skeniranje teh situacij ne morejo rešiti brez ustvarjanja ogromnih, sestavljenih („stitched“) slik ali izgube pomembnih podrobnosti v procesu.
Pojasnjene osnovne komponente: linearni senzor, motor hitrosti vrstice, vmesnik kodirnika in logika za sinhronizacijo v realnem času
To natančnost omogočajo štiri medsebojno odvisne komponente:
- Linearni senzorji , običajno CMOS- ali CCD-polja z 1–16 tisoč aktivnimi piksli, določajo vodoravno razločljivost in spektralni odziv.
- Motorji hitrosti vrstice obdelujejo podatke o pikslu s frekvencami od 10 do 140 kHz, pri čemer dinamično prilagajajo frekvenco vzorčenja hitrosti premikanja predmeta.
- Vmesniki kodirnika pretvarjajo mehansko gibanje v natančne sprožilne signale – dosežejo sinhronizacijo hitrosti z natančnostjo ±0,01 % s kvadraturnim dekodiranjem.
- Logika za sinhronizacijo v realnem času kompensira vibracijsko zazibavanje ali prehodne spremembe hitrosti ter ohranja registracijo pod pikselno natančnostjo pri neprekinjenih skeniranjih.
Skupaj te komponente omogočajo slikanje cilindričnih površin, neskončnih trakov in toplotno nestabilnih materialov brez izkrivljanj – lastnosti, ki jih arhitekture na osnovi površin temeljno ne morejo ponuditi.
Natančno usklajevanje hitrosti črte, hitrosti gibanja in prostorske ločljivosti
Upravljajoča enačba: Δx = v / fline – in kako jo uporabiti za kalibracijo od piksla do milimetra
Natančno določanje prostorskih meritev pri slikanju z vrstičnimi senzorji je odvisno predvsem od tega, kako dobro se hitrost predmeta (v) ujema s hitrostjo vrstice kamere (fline). Osnovna formula je: delta x = v / fline, ki nam pove dejansko razdaljo, ki jo vsak piksel predstavlja. Recimo, da opazujemo transportno trak, ki se premika s hitrostjo 500 milimetrov na sekundo, in naj bo hitrost vrstice naše kamere nastavljena na 10 kilohercov. Ta izračun daje razluščitev približno 0,05 milimetra na piksel. Pri kalibraciji takih sistemov je zelo pomembno dobiti zanesljive meritve hitrosti. Večina uporabnikov za to uporabi laserne dopplerjeve hitrometre, nato pa prilagodi hitrost vrstice, dokler ne doseže želene vrednosti delta x. Paziti je treba tudi na odstopanja: če se vrednosti odmikajo za več kot ±2 %, se napake začnejo pojavljati v pomembnih aplikacijah, kot je npr. preverjanje širine prevodnih sledi na tiskanih vezjih, kjer je natančnost ključnega pomena.
Sinhronizacija na podlagi kodirnika: zagotavljanje poravnave pod pikselom v okoljih z visoko vibracijo ali spremenljivo hitrostjo
Ko se naprave vibrirajo ali ko se njihove hitrosti nenadoma spremenijo, to povzroči časovne težave, zaradi katerih so slike manj ostre in meritve težje ponovljive. Z usklajevanjem kodirnika z nazivnim odzivom sistema za gibanje lahko natančno določimo trenutek zajemanja slik. To pomeni, da tudi pri spremembi hitrosti do 15 % še vedno dosežemo poravnave na podpikselni ravni, ki so tako pomembne za nadzor kakovosti. Številke tudi govorijo same zase: vrteči se kodirniki lahko merijo kote do točnosti 0,001 stopinje, linearni kodirniki pa sledijo položajem z natančnostjo le 1 mikrometer. Te zmogljivosti naredijo vse razliko v zahtevnih industrijskih okoljih. Pomislite na jeklarske tovarne, kjer se vse ves čas trese, ali na tekstilne tovarne, kjer se napetost spreminja trenutek za trenutkom. Z ustrezno sinhronizacijo kodirnikov sistemi zaznajo dejanske napake namesto, da bi po napačni presoji zavrnili brezhibne izdelke. Raziskave kažejo, da ta pristop zmanjša število lažno zavrnjenih izdelkov za približno 40 % v primerjavi s starejšimi metodami, ki delujejo brez kakršnih koli sprožilnih točk.

Kriteriji izbire, ki temeljijo na uporabi za pogoste industrijske primere
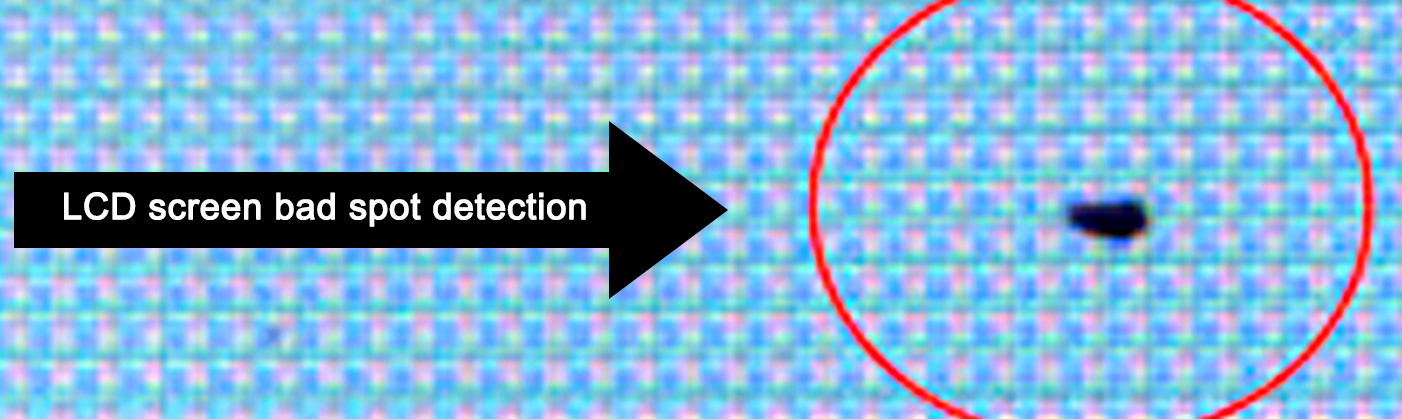
Spletna pregledava: nadzor spremembe napetosti, zveznosti šivanja in lokalizacije napak v realnem času
Pri delu z neprekinjenimi materiali v obliki trakov, kot so papir, plastične folije, kovinske folije ali tkanine v obliki trakov, izbor ustrezne črtno-skenirajoče kamere temelji na treh glavnih dejavnikih, ki so najpomembnejši na proizvodnem odelku. Prva težava je povezana s spremembo hitrosti, ki jo povzročajo spremembe napetosti v celotnem procesu. Za rešitev te težave sistemi potrebujejo prilagodljive krmilnike, ki delujejo vsaj pri 20 kilohercih, ter povratne zanke s kodirnikom, da ostanejo slike poravnane pikica za pikico po celotni širini. Druga težava je brezvrzno združevanje teh slik, kar zahteva natančno prekrivanje matrik pik. Proizvajalci običajno ciljajo na sinhronizacijo, ki je natančnejša od enega mikrosekunde, da se zagotovi kontinuiteta končnih rezultatov pregleda. Tretji dejavnik je zaznavanje napak takoj, ko nastanejo, kar je močno odvisno od moči vgrajenega procesorskega sistema. Številni sodobni sistemi danes uporabljajo FPGA čipe za pospeševanje osnovnih nalog analize slik, kot je zaznavanje presežka meje, kar omogoča označevanje problemov že v petih milisekundah, preden se izdelek zavrne. Nedavne raziskave iz leta 2023 so pokazale, da je prehod s površinsko na črtno-skenirajočo tehnologijo povečal stopnjo zaznavanja napak za skoraj 92 % pri hitrostih vrtenja trakov osem metrov na sekundo, kar razlagajo, zakaj vse več pretvornikov danes opravlja ta prehod.
Skeniranje cilindričnega dela: preslikava kotne ločljivosti, poravnavo vrtilnega kodirnika in uroki izkrivljenosti vidnega polja
Pri delu z vrtečimi se komponentami, kot so steklenice, ležaji ali avtomobilski gredi, kotna ločljivost igra ključno vlogo pri izbiri ustrezne senzorje za opravilo. Osnovna formula izgleda nekako takole: N je enak π, pomnožen s premerom, deljen s številom vrtljajev na minuto (RPM), pomnoženim z 60 in zahtevano prostorsko ločljivostjo. Pravilno določitev teh številk je pomembna, saj lahko napačno poravnani vrteči kodirniki povzročijo težave. Približno v polovici primerov take nepravilne poravnave povzročijo radialno distorzijo nad 15 %, zato večina tehnikov najprej preveri svojo nastavitev z uporabo kvadraturnih signalov. Druga stvar, na katero je treba paziti, je optična distorzija. Običajni objektivi imajo tendenco, da zavijajo slike na ukrivljenih robovih, kar povzroča tako imenovano sodčasto distorzijo. Zato nekatere aplikacije namesto tega uporabljajo telecentrične optike, ki ohranjajo napake merjenja pod 0,1 % po celotnem vidnem polju. Pri pregledih avtomobilskih gredi, kjer je problem odsev svetlobe, predstavlja prehod z 8-bitnih na 12-bitne senzorje veliko razliko. Večina delavnic poroča približno 70-odstotni padec lažnih meritev ob nadgradnji, čeprav se rezultati razlikujejo glede na specifične pogoje.
Črtna kamера nasproti ploščni kameri: kdaj izbrati katero za optimalen ROI
Pet odločilnih scenarijev, v katerih črtna kamера zagotavlja nepregledno zmogljivost in stroškovno učinkovitost
Čeprav so ploščne kamere še naprej optimalne za ločene, statične ali počasne predmete, tehnologija črtnih kamer zagotavlja nadgrajeno zmogljivost – in močnejši ROI – v petih industrijskih kontekstih z visoko proizvodnjo:
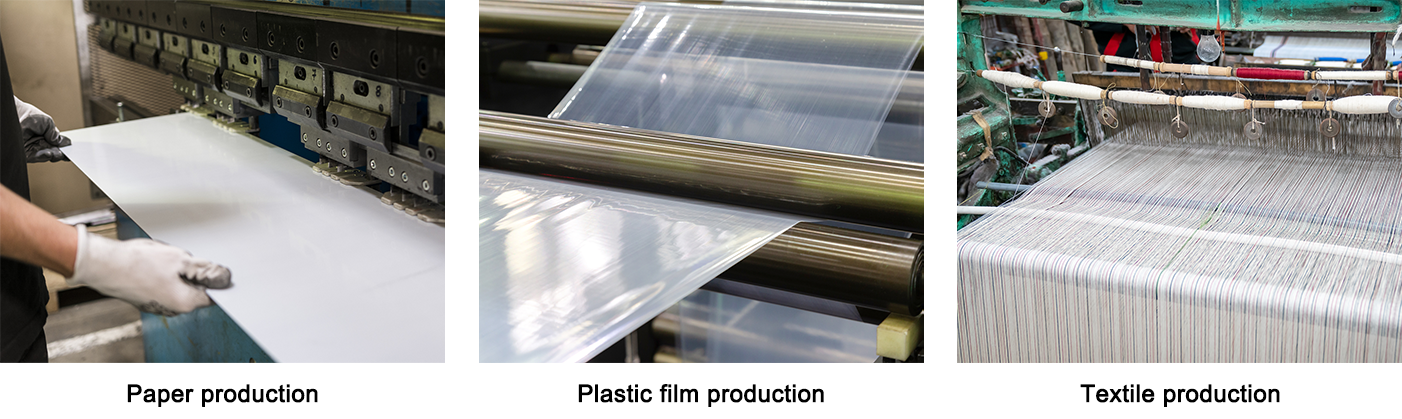
- Nadzor hitrih materialnih trakov (papir, folije, plastične membrane), kjer gibajoča se zamazanost podkopava natančnost ploščnih kamer; črtna kamера zajame brez izkrivljenja enodimenzionalne rezine s frekvenco >70 kHz, kar omogoča neprekinjeno slikanje na razdaljah v kilometrih.
- Nadzor kovinskih trakov med vročim valjanjem, kjer toplotna driftna premikanja in strukturne vibracije zahtevajo sinhronizirano zajemanje s kodirnikom, da se ohrani registracija pod pikslno natančnostjo.
- Proizvodnja tekstila , kjer se elastičnost tkanine in spremenljiva napetost upravljata z realno časovno kalibracijo pikslov – s tem se izognejo artefaktom pri šivanju, ki so značilni za večkamerni ploščni sistem.
- 360° nadzor vrtečih se cilindričnih delov , kjer zemljevid kotne ločljivosti omogoča zaznavo napak na mikronski ravni pri hitrostih nad 2.000 vrt/min.
- Skeniranje velikih površin (sončne celice, kompozitni materiali za letalsko in vesoljsko tehnologijo), kjer vrstično skeniranje odpravi potrebo po dragem usklajevanju večkamernih sistemov in kalibracijskih postopkih.
V teh aplikacijah sistemi vrstičnega skeniranja zmanjšajo stroške opreme in integracije za 30–60 % ter hkrati zmanjšajo število napačno zavrnjenih izdelkov – ki jih pogosto povzročajo motnje zaradi gibanja pri sistemih ploščnega skeniranja – za približno 15 %. Njihova razširljivost in arhitektura z enim samim senzorjem zagotavljata donos investicije (ROI) že v 8–12 mesecih v proizvodnih okoljih z visoko zmogljivostjo.

Ste pripravljeni izbrati pravo vrstično kamero za vašo industrijsko aplikacijo?
Prava vrstična kamera je temelj zanesljivega in hitro delujočega industrijskega pregleda – noben algoritem ali programska oprema ne more nadomestiti kamere, ki ni primerno prilagojena vaši hitrosti transportne trakove, zahtevani ločljivosti ali proizvodnemu okolju. S prilagoditvijo hitrosti vrstice, ločljivosti senzorja, sinhronizacije z kodirnikom in optičnega načrta vaši specifični aplikaciji, boste odklenite brezvrzno, mikronsko natančno pregledovanje, zmanjšajte napačne zavrnitve in dosežite merljiv povratek investicije (ROI) za vašo proizvodno operacijo.
Za industrijske rešitve s kamero za črtno skeniranje, prilagojene vašim zahtevam glede pregledovanja trakov, cilindričnega skeniranja ali slikanja v velikem formatu, ali za izgradnjo popolnoma integriranega sistema strojnega vida z dodatno osvetlitvijo, lečami in orodji za sinhronizacijo kodirnika (kot jih ponuja HIFLY), sodelujte z dobaviteljem, ki temelji na izkušnjah s področja industrijskega strojnega vida. HIFLY 15-letna izkušnja obsega visokohitrostne 10 GigE 8K kamere za črtno skeniranje, večspektralne slikovne sisteme ter kompletna industrijska rešitve za pregledovanje – podprte z certifikatom ISO 9001:2015, več kot 30 izumskimi patentmi in podporo za več kot 2.500 strank v več kot 30 državah. Kontaktirajte nas danes za brezplačno posvetovanje, da izberete najprimernejšo kamera za črtno skeniranje za vašo operacijo.





