

Razlika med kamerami za območje in kamerami s črtnim skeniranjem
Ploščne in črtno skeniranje kamere se razlikujeta v načelu slike, uporabnih primerih ipd., kot sledi:
1. Osnovne razlike: struktura in metoda slikanja
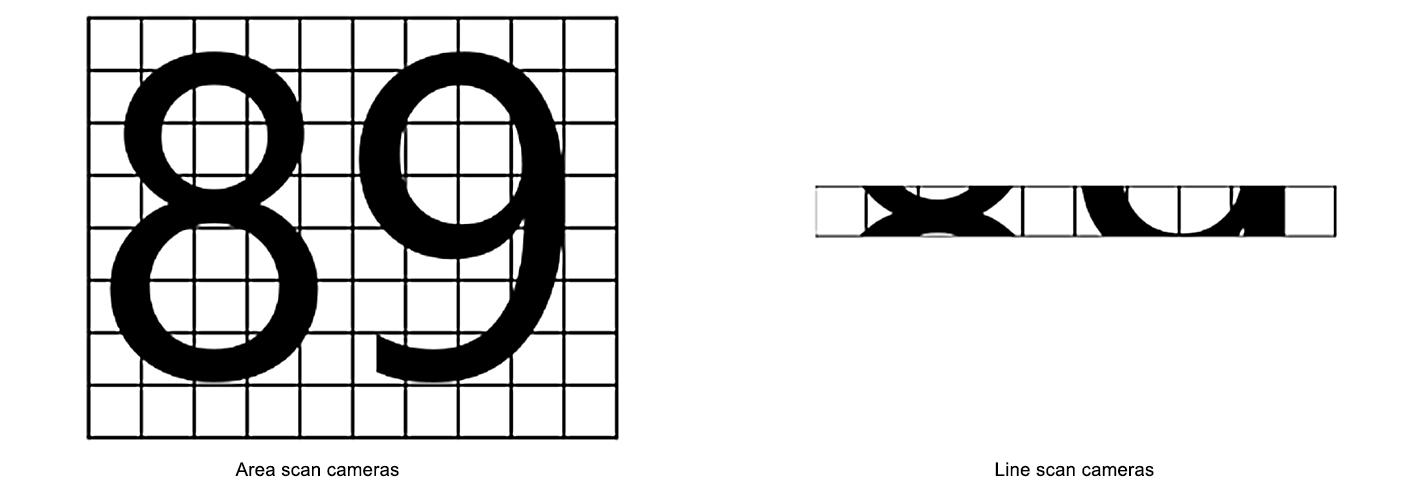
Kamere s ploskovnim skeniranjem: Senzor je dvodimenzijska ravnina (podobna matriki). Popolno dvodimenzijsko sliko je mogoče zajeti z enim samim izpostavljanjem. Vsakodnevne naprave, kot so mobilne telefone in refleksne kamere, spadajo v ploščne kamere.
Kamere z linijskim skeniranjem: Senzor je črta (enodimenzijski niz). Za zajemanje slik je treba sodelovati z gibanjem predmeta ali kamere (npr. gibanje tekočega traku, skeniranje s kamero), da zajamete slike vrstico za vrstico in jih nato sestavite v dvodimenzijsko sliko. Podobno kot pri metenju s krtačo, ki prekrije celotno površino z gibanjem.
2. Razlike v primerih uporabe
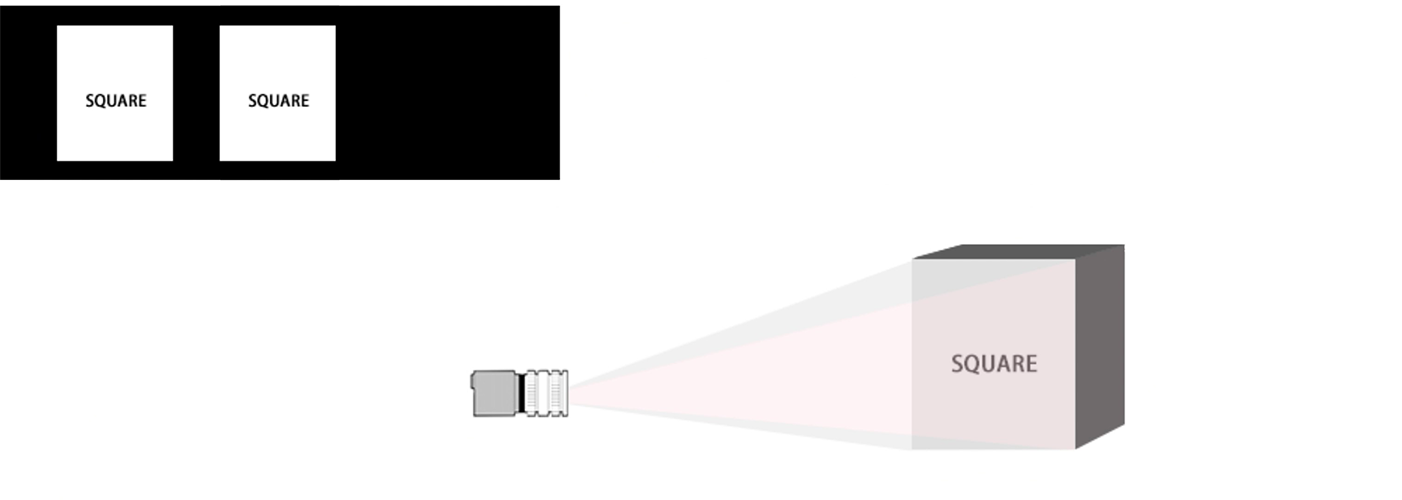
Kamere s ploskovnim skeniranjem: Primerni za posnetke statičnih predmetov ali predmetov z majhnim gibanjem, kot so fotografije osebne izkaznice, statični pregled izdelkov, vsakodnevno fotografiranje ipd. Njihova prednost je enostavna uporaba in hitro pridobivanje popolnih slik.
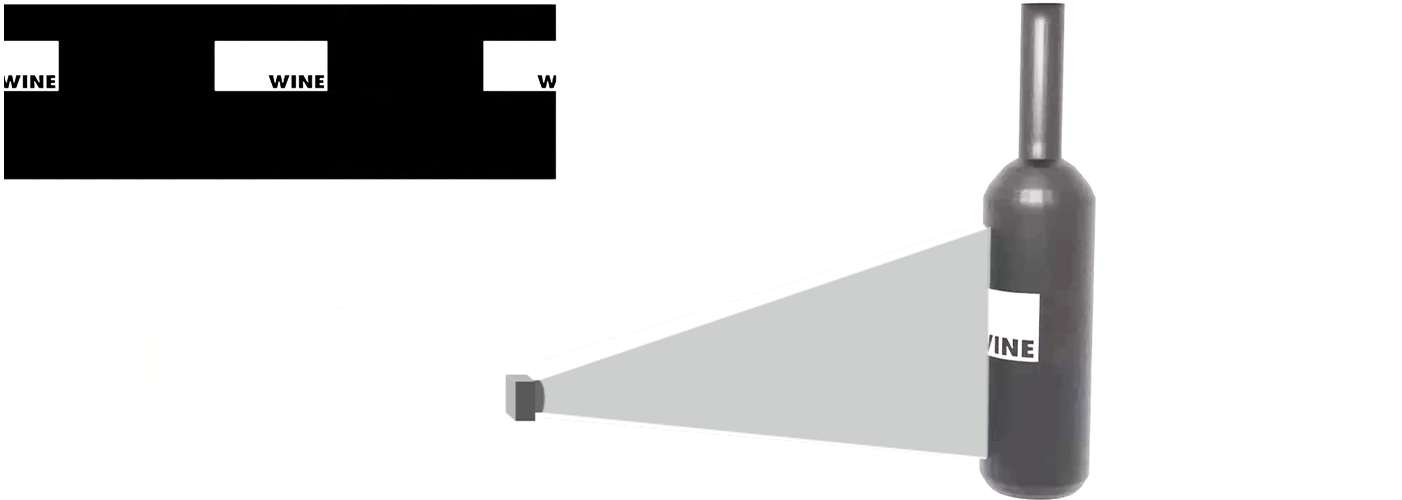
Kamere z linijskim skeniranjem: Primerno za posnetke velikih površin, hitro gibajočih se objektov, kot so npr. kontinuirano preverjanje tkanine in papirja, skeniranje cest, kontrola kakovosti tiskanih izdelkov ipd. Prednost je višja ločljivost posnetka in jasnejši detajli v dolgih pasovih ali v primerih zveznega gibanja.
3. D elovanje delovnih načel
Jedrna razlika delovnih načel kamer s ploskovnim in vrstičnim skeniranjem leži v strukturi senzorja in načinu posnemanja, in sicer na naslednji način:
(1).Delovno načelo kamer s ploskovnim skeniranjem
Struktura senzorja: Jedro je dvodimenzionalni ploskovni matrični senzor (npr. CCD ali CMOS), sestavljen iz številnih slikovnih točk, ki tvorijo ravninsko matriko (podobno mreži).
Proces posnemanja: Ko se odpre zapiralnik, svetloba osvetli celoten senzor s področjem hkrati skozi lečo. Vsak piksel senzorja prejme svetlobo sočasno in jo pretvori v električne signale. Po obdelavi se neposredno ustvari popolna dvodimenzionalna slika (vključno z informacijama o širini in višini).
Značilnosti: Pridobivanje celotne slike se lahko zaključi z enim samim izpostavljanjem, ne da bi bilo odvisno od zunanega gibanja, in je primerno za zajemanje statičnih ali počasi gibljivih objektov.
(2).Načelo delovanja črtnih kamer
Struktura senzorja: Jedro je enodimenzionalni črtni senzor z razporejenimi pikseli v ravni črti (vsebuje samo eno vrstico pikcev).
Proces posnemanja: Linija s senzorjem lahko vsakič zbere le informacijo o sliki ene vrstice (vsebuje samo informacijo o širini). Za to potrebuje enakomerno gibanje objekta (npr. s trakom) ali skeniranje s kamero, da senzor zbiranje vrstic s slikami na različnih mestih, vrstico za vrstico. Nato program preračuna te zvezne vrstice v končno popolno dvodimenzionalno sliko (širina + dolžina, ki jo določa gibanje).
Značilnosti: Deluje z zunanjim gibanjem, primerno za slikanje neprekinjenih, hitro gibljivih ali velikih objektov in ohranja visoko ločljivost med gibanjem.
4. Druge ključne razlike
Ločljivost in frekvenca posnetkov: Linije s kamerami imajo običajno več pikslov v eni smeri in omogočajo visokoločljivo slikanje pri hitrem gibanju; kamere s površino imajo bolj prilagodljivo frekvenco posnetkov (število posnetkov na sekundo), kar je primerno za zajem trenutnih slik.
Stroški in kompleksnost: Linjske kamere morajo biti opremljene z napravami za upravljanje gibanja, zato je sistem bolj kompleksen in stroški višji; sistemi s ploskovnimi kamerami so preprosti in stroški so relativno nizki.





