

Koliko industrijskih kamer lahko en posrednik podpre v vizualnem sistemu?
V sodobnih vidnih sistemih je določitev, koliko kamer lahko en sam gostitelj (npr. računalnik ali strežnik) podpira, ključno vprašanje za oblikovanje sistema, skalabilnost in optimizacijo stroškov. Odgovor odvisi od večkrat povezanih faktorjev, vključno z možnostmi strojne opreme, učinkovitostjo programske opreme, specifikacijami industrijskih kamer in zahtevami aplikacije. V tem članku raziskamo te ključne spremenljivke in ponudimo okvir za oceno zmogljivosti kamere v vidnem sistemu.
1. Strojne komponente in njihov vpliv
Strojna oprema gostitelja je osnova za podporo kameram, pri čemer igrajeta glavno vlogo dve ključni aspekta.
1.1 Obdelovalni enoteni: CPU in GPU
Procesor CPU obravnava širok obseg opravil za obdelavo slik, od osnovnih filtriranj do kompleksnih inferencij strojnega učenja. Kamere z visoko ločljivostjo ali visokim številom sličic generirajo velike količine podatkov, ki obremenjujejo CPU. Večjedrsni CPU-ji, kot so Intel i9 ali AMD Threadripper, lahko razporejo naloge med jedri za vzporedno obdelovanje. S druge strani pa GPU-ji preobrazijo vizualne sisteme tako, da pospešujejo vzporedno računanje, kar je posebej pomembno za naloge, kot je 3D vid in globoko učenje v avtonomnem vožnjenju. Kamere, integrirane z GPU-optimiziranimi poti, kot je CUDA v NVIDIA GPU-jih, odvzamejo obdelovanje procesorju CPU, kar lahko poveča število podprtih kamer do trikratnik.
1.2 Spomin, shramba in I/O
Dovoljno RAM spomina je ključno za medpomnilniško shranjevanje videoposnetkov in obdelanih podatkov. Kamera s 4K različnim pri 30 FPS ustvari okoli 300 MB/s nekompresiranih podatkov, kar povečuje zahteve po pomnilniku v sistemih z več kamerami. Za kamere z visoko ločljivostjo priredite vsaj 4–8 GB RAM na kameru. Hitrostno shrambo, kot so NVMe SSD-ji, in robustne I/O vmesnike, kot so USB 3.2 in PCIe, sta bistveni za vnos in shranjevanje podatkov. Starejše vmesnike lahko resno omejijo skalabilnost sistema.
2. Industrijski Specificacije kamere
Parametri industrijskih kamer neposredno vplivajo na obremenitev gostiteljskega sistema, predvsem prek naslednjih dveh ključnih faktorjev.
2.1 Ločljivost in frekvenca slik
Višja ločljivost in frekvenca sličic pomenita več podatkov, ki jih je potrebno obdelati. Kamera z 4K ločljivostjo ustvari štiri krat več pikslov kot kamera s 1080p ločljivostjo, kar znatno poveča zahteve po obdelavi. Podobno, kamera s 120 FPS ustvari štiri krat več podatkov kot kamera s 30 FPS. V športni vsebini se uporabljajo kamere z visoko ločljivostjo in visoko frekvenco sličic, vendar stavitelju postane izredno velik obremenitveni teret, kar zahteva močno strojno opremo, da se izognemo izgubi kakovosti.
2.2 Stiskanje in vmesnik
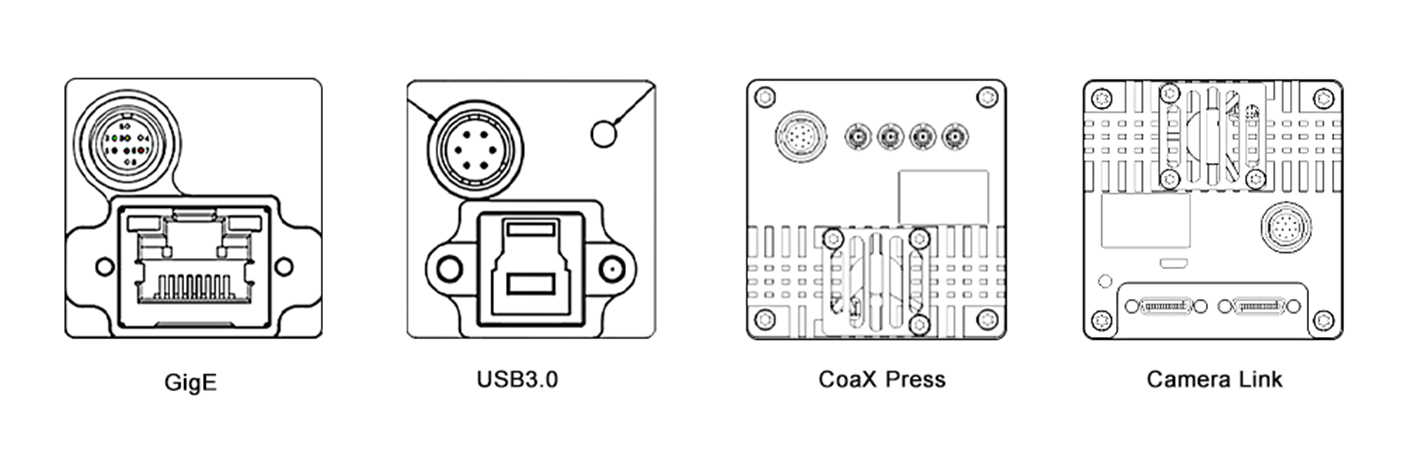
Izbira formata za stiskanje vpliva na velikost podatkov in stroške obdelave. Stisnjene formate, kot je H.264, zmanjšajo pasovno širino, vendar zahtevajo dekodiranje na stavitelju. Nestisnjene formate ponujajo višjo zanesljivost, vendar porabljajo več virov. Poleg tega je vrsta vmesnika kamere ključna. Visokohastni vmesniki, kot so GigE Vision in CoaXPress, omogočajo učinkovito prenos podatkov za nastavitve z več kamerami, medtem ko starejše vmesnike, kot je USB 2.0, omejujejo skalabilnost zaradi omejene pasovne širine.
3. Programska oprema in procesna cev
Efektivnost programske opreme je enako kritična, saj sta ta dva področja ključna za delovanje sistema.
3.1 Operacijski sistem in orodja programske opreme
Operacijski sistem in njegovi gonilniki tvorita osnovno programsko opremo. Realni časovni operacijski sistemi (RTOS) zmanjšujejo zakasnitev, kar jih dela idealnimi za uporabe kot je robotična nadzorna oprema. Sistemi z osnovo Linux so priljubljeni zaradi podpore odprtega koda. Optimizirana gonilnika povečajo izvedbo strojnega dela. Vizualna programska oprema in knjižnice, kot so OpenCV, MATLAB ter globinsko učne okvire kot TensorFlow in PyTorch, se razlikujejo v računskem učinkovitosti. Na primer, gostitelj, ki zazeni GPU pospešeno YOLO modela, morebiti podpira manj kamero kot tisti, ki uporablja osnovno odkrivanje robov zaradi višje kompleksnosti.

3.2 Večkratno vlakno in optimizacija
Učinkovito večkratno vlakno in vzporednost sta ključna za maksimiziranje zmogljivosti sistema. Večkratno vlakno omogoča, da se opravila izvajajo hkrati na jedrilih CPU, medtem ko vzporednost izkorišča GPU-je za obdelovanje podatkov. Tehnologije kot so OpenMP in CUDA ponujata okvire za implementacijo. V večkamerskem nadzornem sistemu lahko OpenMP porazdeli obdelovanje kamerskih posnetkov po jedrih CPU, CUDA pa lahko pospeši analizo slik na GPU-ju, kar omogoča upravljanje z več kamero.
4. Zahtevke aplikacij
Zloženost vizualnega naloga določa razdelitev virov, pri čemer so realno časovne in obdelovalne zahtevnosti glavni določevalci.
4.1 Realno časovno obdelovanje proti offline obdelavi
Realno časovne aplikacije, kot so avtonomno vožnja in industrijska avtomatizacija, zahtevajo takojšnje obdelovanje z nizko odgovornostjo, kar omejuje število kamer, ki jih lahko gostitelj podpira. Offline obdelava, kot je analiza videoposnetkov v seriji, lahko obravnava več kamer, vendar ima zakasnjene rezultate.
4.2 Obdelovalna zahtevnost
Preproste naloge, kot je zaznavanje gibanja, povzročijo nizek računski obremenitev, kar omogoča gostitelju podporo večje številke kamero. Kompleksne naloge, kot so 3D rekonstrukcija ali napredno prepoznavanje obraza, zahtevajo znatne vire, kar zmanjša število podprtih kamer. Na primer, gostitelj lahko podpira 10 kamer za zaznavanje gibanja, vendar le 3 za realno-časovno 3D oceno globine.
5. Ocenjevalni okvir
Uporabite naslednje korake za oceno zmogljivosti kamere:
Določite parametre kamere: Ločljivost, frekvenca sličic, stiskanje in vmesnik.
Izračunajte pretok podatkov: Nestisnjena hitrost podatkov = Ločljivost × Frekvenca sličic × Bitna globina / 8 (npr., 1080p pri 30 FPS = 1920×1080×30×24 / 8 = ~1,4 GB/s).
Oceni omejitve strojnega opreme: Zaženite moč procesorja/GPU ≥ skupni pretok podatkov × faktor obremenitve obdelave (2–5× za kompleksne naloge).
Preizkusi z prototipi: Uporabite orodja za primerjavo (npr., Intel VTune, NVIDIA Nsight), da boste merili uporabo virov za eno kamero, nato linearno povečajte (z prilagoditvami zaradi dobljenih/zgubljenih prednosti pri vzporedni izvedbi).
Zaključek
Število kamere, ki jih lahko gostitelj podpira v vizualnem sistemu, ni fiksna vrednost, temveč ravnotežje med možnostmi strojne opreme, specifikacijami kamer, optimizacijo programske opreme in kompleksnostjo opravil. Za večino sistemov je najbolj zanesljiva pristopa začetek s prototipom in postopno povečevanje, medtem ko spremljate uporabo virov. S hitrim razvojem strojne opreme (npr., hitrejše GPU-je, AI pospeševalnike) in programske opreme (npr., okvirji za robno računanje) bo zmogljivost za podporo več kamer z višjo zmogljivostjo še naprej rastla. Ta razvoj bo omogočil razvoj bolj sofisticiranih in skalabilnih vizualnih rešitev, kar bo odprlo nove možnosti v različnih industrijah, od zdravstva in prometa do varnosti in zabave.
Članek ponuja osnovno razumevanje za sistemskih arhitektov in inženirje, poudarjajoč potrebo po prilagojenem testiranju in optimizaciji, da se izpolnijo posebne zahteve aplikacij. S pozorno razmislico o vseh vključenih faktorjih je mogoče načrtovati vizualne sisteme, ki so hkrati učinkoviti in sposobni obravnavati vedno večje zahtevnosti sodobnih aplikacij.





