

Detekcija kontur s strojnim vidom
V dobi industrije 4.0 in pametne avtomatizacije je strojno vidrenje postalo temeljna tehnologija, ki omogoča strojem, da »vidijo« in natančno interpretirajo vizualne podatke, pri čemer njihova natančnost pogosto presega človekove sposobnosti. Medtem ko ima številne ključne funkcije, odkritje konfora je kritična: izlušči oblike meja objektov iz digitalnih slik in s tem postavi temelj za naloge, kot so prepoznavanje objektov, merjenje dimenzij, pregledovanje napak in manipulacija z roboti.
1. Kaj je zaznavanje kontur?
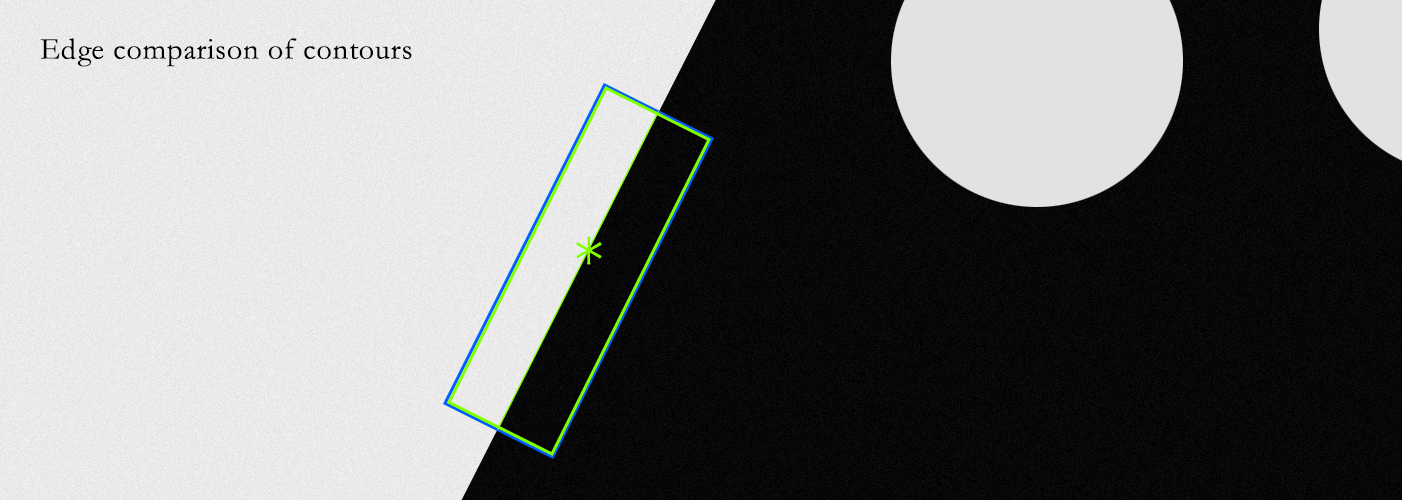
»Kontura« v obdelavi slik je krivulja, ki povezuje zvezne točke (vzdolž meje objekta) z enako intenzivnostjo ali barvo in ločuje objekt od njegovega ozadja. Za razliko od diskretnih robov (prehodi med svetlo in temno na ravni pikslov) so konture zvezne zanke (ali odprte krivulje za delne objekte), ki predstavljajo oblika objekta, ne samo izolirane spremembe intenzivnosti.
Glavni cilj zaznavanja kontur je poenostaviti podatke s slik: zmanjšanje dvodimenzionalne slike na enodimenzionalne črte kontur omogoča strojem, da učinkovito analizirajo geometrijo objekta (velikost, kote, simetrijo), ne da bi obdelovali vsak posamezen piksel – kar je nujno za aplikacije v realnem času, kjer sta hitrost in natančnost enako pomembni.
2. Osnovna načela
Zaznavanje kontur temelji na dveh ključnih korakih: predprocesiranje (izboljšanje kontrasta med objektom in ozadjem) in izluščevanje kontur (določanje točk meja). S tem se ukrepamo proti napakam v surovih slikah, kot so hrup, neenakomerna osvetlitev ali nizki kontrast, ki zakrivajo meje.
2.1 Predprocesiranje
Surove slike redko vsebujejo jasne meje, zato je predprocesiranje nujno:
Pretvorba v sivine : Večina algoritmov uporablja enokanalne sivinske slike (poenostavlja podatke iz treh RGB kanalov v enega, saj barva pogosto ni pomembna).
Zmanjšanje šuma : Gaussovo zamegljevalo gladko slike z Gaussovim jedrom, zmanjšuje visokofrekvenčen hrup, hkrati pa ohranja glavne spremembe intenzivnosti – ključno za preprečevanje lažnih robov zaradi senzorskih motenj ali nihanj svetlobe.
Zaznavanje robov : Prepoznava spremembe intenzivnosti na ravni pikslov (robovi), ki tvorijo konture. Cannyjev detektor robov (večstopenjska metoda: zamegljevanje, izračun gradienta, ne-največja zavrnitev, pragovljenje z histerezo) je zlato merilo, ki ustvarja tanke, zvezne robove. Sobelov operator, ki poudarja vodoravne/vertikalne robove, deluje za debelejše meje.
Pragovljenje : Pretvarja sivinske robne mape v binarne (črno/belo) slike, pri čemer so predmetni robovi (objekti) 1 in ozadje 0 – poenostavlja sledenje konturam.
2.2 Izluščevanje kontur
Po predobdelavi algoritmi sledijo povezanim piksličnim podatkom v ozadju, da tvorijo konture. Freemanov verižni kod se pogosto uporablja: konture predstavlja kot smernokodne kode (gor, dol, levo, desno) v primerjavi s prejšnjim pikselom, zmanjšuje shranjevanje in omogoča enostavno primerjavo oblik. Knjižnice, kot je OpenCV, to poenostavijo z funkcijami, kot je findContours(), ki vrne koordinate pikslov kontur in omogoča filtriranje (po površini ali razmerju stranic) za odstranitev hrupa.

3. Napredne tehnike
Tradicionalne metode delujejo v kontroliranih, visokokontrastnih okoljih, vendar realni primeri (neenakomerno osvetljenje, prekrivajoči se objekti) zahtevajo naprednejše pristope:
Prilagodljivo prahovanje : Izračuna lokalne prahove za vsak piksel (v nasprotju z enim samim globalnim prahom), primerno za slike z različnim osvetljenjem (npr. industrijske dele pod tovarniškimi lučmi).
Detekcija na podlagi globokih nevronskih mrež : Konvolucijske nevronske mreže (CNN) neposredno izvlečejo meje iz surovih slik, pri čemer preskočijo ročno predprocesiranje. Modeli, kot je HED (Holistično-nested robni detektor) in RCF (Bogatejše konvolucijske značilnosti) združevanje večstopenjskih CNN značilnosti za povečanje kakovosti robnih kart, izjemno dobro opravlja v kompleksnih prizorih (zdravstvene slike, zamešane okolja).
4. Ključne izzive
Ključne težave ostajajo kljub napredku:
Glušenje in osvetlitev : Tla v tovarni, slaba osvetlitev ali zunanje nastavitve povzročajo prekinjene/lažne konture.
Prekrivajoči/prekrivani objekti : Naslagane komponente združujejo konture, zaradi česar je težko razločiti posamezne oblike.
Prozorna/reflektirajoča materiala : Staklo ali kovina sipa svetlobo, kar povzroča študije/izkrivljene robove.
Realno-časovna izvedba : Industrijske naloge (kontrola v proizvodni liniji) potrebujejo 30+ frejmov na sekundo (FPS). Za izpolnitev hitrostnih zahtevkov je potrebno optimizacijo (kvantizacijo, GPU pospeševanje) globokih učnih modelov.
5. Uporaba v resničnem svetu
Označevanje kontur omogoča avtomatizacijo v različnih panogah:
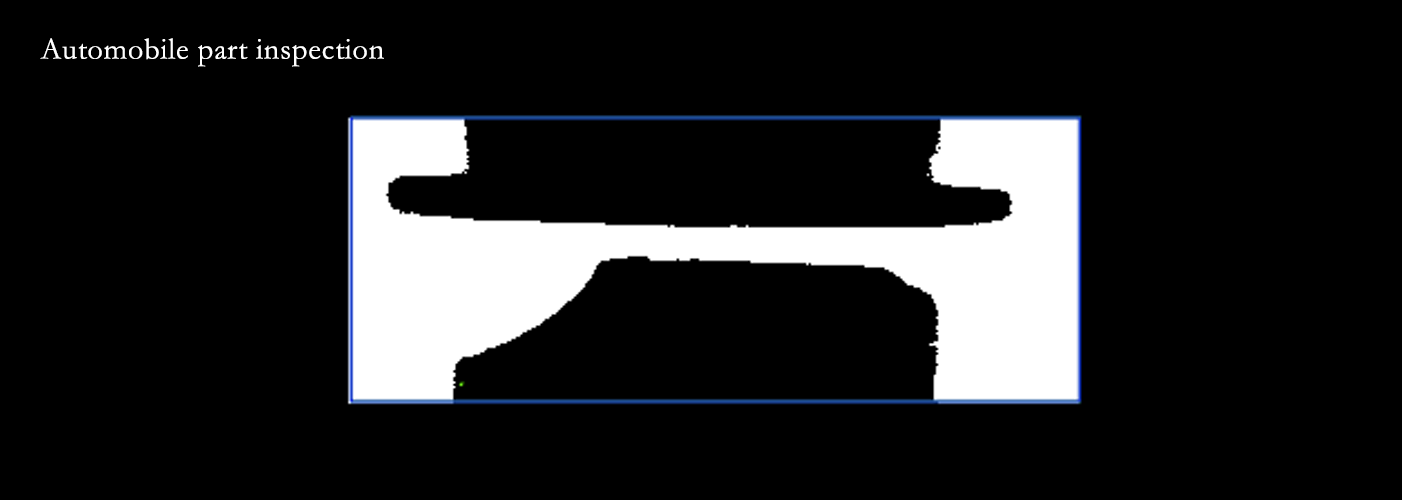
Industrijski inšpekcijski pregled kakovosti : Preverjanje napak (pokan, vbočen) v proizvodnji. Na primer, v avtomobilski industriji se preverja, ali ustrezajo konture motornih komponent (zobniki, tesnila) zasnovanim konturam in se zavrnejo deli, ki ne ustrezajo tolerancam.
Roboti za dvig in postavljanje : Pomaga robotom pri iskanju predmetov. V skladiščih roki robotov uporabljajo konture za iskanje paketov na tekočih trakih, izračun sredinske/orientacijske točke in prilagoditev prijema.
Trgu medicinskega slikanja : Označuje anatomske strukture (tumori na CT posnetkih, meje celic na histoloških rezinah) za podporo pri diagnostiki. Modeli globokih nevronskih mrež dobro obdelujejo spremenljivo biološko tkivo.
Kmetijstvo : Razvršča sadje (jabolka, pomaranče) po velikosti/zrelosti s pomočjo analize kontur ter odkriva rastlinske bolezni s spremembami kontur listov.
Prometni nadzor : Sledi vozilom, meri tok prometa ali prepoznava nesreče (preko neobičajnih kontur ali nepremičnih objektov) z uporabo nadzornih kamer.
6. Prihodnje tendence
Trije trendi bodo oblikovali zaznavanje kontur:
Vključitev Edge AI : Lahkonamenski modeli (kvantizirane konvolucijske nevronske mreže) na napravah na robu omreže (industrijske kamere, droni) omogočajo obdelavo v realnem času brez odvisnosti od oblaka – kar je ključno za avtonomne robote.
Fuzija več modalnosti : Kombiniranje vizualnih podatkov z LiDAR/termalnim slikanjem izboljša zaznavanje v težkih pogojih (npr. termalno slikanje poveča vidljivost v nizki svetlobi; LiDAR pa doda 3D globino za prekrivajoče se objekte).
Razločno umetno inteligenco (XAI) : Tehnike XAI bodo pojasnile, kako modeli globokih nevronskih mrež zaznajo konture, s čimer bo povečano zaupanje v kritičnih področjih (medicinska diagnostika, inspekcija v letalstvu).
Zaključek
Zaznavanje kontur s strojnim vidom povezuje surove podatke s slik in omogoča uporabne uvidove, ki omogočajo avtomatizacijo in nadzor kakovosti. Od tradicionalnega zaznavanja robov do metod globokih nevronskih mrež se je razvila, da se sooči s kompleksnimi izzivi. Ko se tehnologija razvija, bo ostala v središču pametnih sistemov in s tem povečala sposobnosti in zanesljivost strojev v različnih panogah.





