

Integrationsråd för kortnivåkameror för ingenjörer
Att välja rätt gränssnitt för kortnivå-kameraintegration
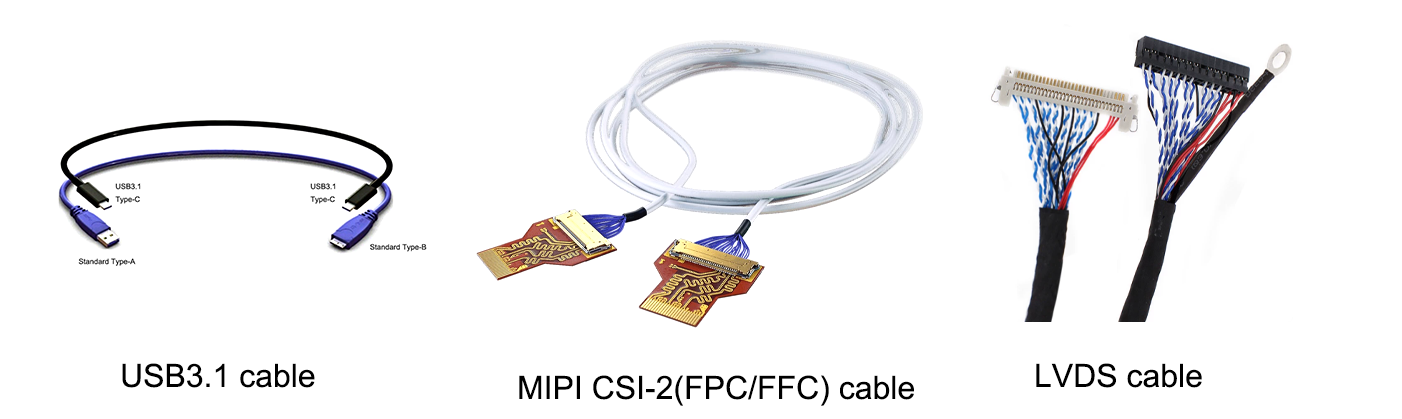
USB 3.1, MIPI CSI-2 och LVDS: Kompromisser mellan bandbredd, latens och realtids-synkronisering
Inbyggda ingenjörer står inför avgörande kompromisser när de väljer gränssnitt för kameraintegrering på kortnivå. USB 3.1 ger hög bandbredd (5 Gbps), vilket gör det lämpligt för HD-videostreaming – men dess protokollöverhead introducerar en latens på 5–10 ms, vilket begränsar dess lämplighet för realtidsstyrloopar. MIPI CSI-2 erbjuder skalbar bandbredd (upp till 6 Gbps per kanal) och hårdvarutriggad synkronisering, vilket möjliggör submillisekunds-latens och exakt tidsinställning för flera sensorer – idealiskt för industriell automatisering och robotik. LVDS ger deterministisk, extremt låg-latensöverföring (<1 ms) via enkla seriella protokoll, även om dess bandbredd per kanal är begränsad till ca 655 Mbps, vilket begränsar användningen till lägre upplösning eller komprimerade strömmar. Visionssystem som kräver strikt synkronisering mellan kameror bör prioritera MIPI CSI-2; säkerhetskritiska applikationer, såsom perception i autonom fordonsdrift, drar nytta av LVDS:s förutsägbara tidsinställning. USB 3.1 förblir en genomförbar lösning för kostnadskänslomässiga, icke-realtidsbaserade HD-övervakningsapplikationer där liten latens är acceptabel – förutsatt att termiska och bearbetningsrelaterade begränsningar har validerats.
Bästa praxis för signalintegritet och kretskortsutläggning av Interface
Signalintegritet är gränssnittsspecifik och grundläggande för pålitlig kameraprestanda på kortnivå. För USB 3.1 ska differentiell impedans på 90 Ω upprätthållas med längdmatchade par (±5 mil), routning med jordskärm och strikt separation från brusiga digitala spår för att undertrycka elektromagnetisk störning (EMI). MIPI CSI-2 kräver en impedans på 100 Ω per differentiell kanal, längdmatchning inom ±10 mil samt undvikande av genomkontakter i närheten av mottagare – särskilt viktigt för höghastighetskanaler som arbetar vid frekvenser över 1,5 Gbps. LVDS-layouter kräver korta spårlängder (<10 tum), konstant impedans på 100 Ω samt skyddsspår för att undertrycka korsförvrängning (crosstalk). För alla gränssnitt bör jordplanen delas upp för att isolera analog kretselektronik för sensorer från digitala ISP- och processorområden, avkopplingskondensatorer bör placeras inom 2 mm från strömfötterna, och man bör använda stackups med fyra eller fler lager samt kontinuerliga referensplan. Felaktig routning står för 32 % av bildartefakter i prototypbaserade visionssystem – vilket gör post-layout-simulering och impedansvalidering obligatoriska för uppdragskritiska designlösningar.
Mekanisk integration: Objektivmontering och optisk flexibilitet
Exakt linssättning är avgörande: mikrometerstora feljusteringar orsakar fokusdrift, förvrängning eller upplösningsförlust. Ingenjörer måste balansera mekanisk styvhet – avgörande för motstånd mot stötar/vibrationer – med justerbarhet på plats, vanligtvis uppnådd via gängade cylindrar eller monteringsplattor med skivor. Optisk flexibilitet kräver kompatibilitet med olika linstyper (fast fokus, varifokal, vätskebaserad) samt stöd för justering av brännvidd genom spiralformade mekanismer eller motorstyrda regulatorer. Termiska expansionsmismatch mellan linser och sensorer kräver åtgärder – exempelvis användning av material med låg temperaturutvidgningskoefficient (t.ex. Invar, keramiska kompositmaterial) eller kinematiska fästen – särskilt i industriella miljöer (-40 °C till +85 °C). För infraröd eller multispektral bildbehandling blir substratmaterialets genomskinlighet i den aktuella våglängdsbandet (t.ex. germanium för LWIR, kvartsglas för UV) en primär designbegränsning. Modulära linssnitt möjliggör snabb byte utan full omkalibrering, men flänsavståndstoleranserna måste förbli under 10 µm för att undvika vignettering eller försämring av MTF.

Säkerställa robust samexistens på systemnivå i kameradesigner på kortnivå
EMI-minder och uppdelning av jordplan för samexistens mellan sensor och ISP
Kameradesigner på kortnivå utan hölje saknar EMC-skyddet hos inneslutna moduler, vilket lägger större ansvar på isolering på kretskorts-nivå mellan bildsensorer och ISP:er (Image Signal Processors). Avgränsade jordplan – där analoga sensordomäner separeras från digitala ISP-delsubsystem – är avgörande för att minimera ledningsburen störkoppling, eftersom blandad-signal-störning kan introducera klockharmoniska som överstiger 50 dBμV/m (IEC 61000-4-3). Effektiva strategier inkluderar stjärnpunktsjordning vid strömföringspunkten, skyddsspår med sammanfogande genomkontakter runt höghastighetsdigitala nät, undvikande av termiska avslackningar i jordfyllningar nära sensorer samt tillsats av ferritperlor på I²C-klockledningar. Signalintegriteten försämras snabbt när avståndet mellan sensor och ISP understiger 3λ för den högsta driftfrekvensen – vilket kräver impedanskontrollerad routning och differentiella par med matchad längd. Tidig prototypning med närfälts-EMI-prober (5 mm avstånd) identifierar varma punkter; lokal mu-metallskyddning över sensorer minskar utstrålade emissioner med 12–18 dB (FCC OET-65). Att bibehålla ett avstånd på ≥40 mil mellan blandade signaldomäner förbättrar konsekvent signal-brus-förhållandet (SNR) med 20 % i högupplösningsmoduler.
Programvaruintegration och SDK-portabilitet för kameror på kortnivå
Drivstöd för flera plattformar: Linux RT, QNX och bare-metal-RTOS med Spinnaker
Plattformsoberoende programvaruportabilitet är oumbärlig för inbyggda vision-lösningar som omfattar Linux Real-Time (RT), QNX och resursbegränsade bare-metal RTOS-miljöer. Varje operativsystem ställer olika krav på tidsstyrning, minne och drivrutinsmodeller – men pixelperfekt bildförvärv och hårdvarutriggad synkronisering måste bevaras konsekvent. Ett enhetligt SDK-abstraktionslager täcker denna lucka: Spinnaker SDK, till exempel, tillhandahåller standardiserade API:er för x86-, ARM- och RISC-V-plattformar samtidigt som den nativt stödjer realtidsbildförvärv, hårdvarutriggning och åtkomst till ISP-registrerar. Detta eliminerar onödig duplicering av drivrutinsutveckling vid migrering från industriella PC:er med Linux RT till mikrokontrollerbaserade RTOS-målplattformar. Team som använder sådana ramverk minskar integreringstiden med upp till 40 %, samtidigt som de bibehåller deterministiskt beteende – även vid termisk neddrift eller spänningsanpassning.
Klar att förenkla din integration av kameror på kortnivå för OEM-produktion?
Sömlös integration av kameror på kortnivå är grunden för pålitliga, högpresterande inbyggda visionssystem – inget avancerat algoritm eller bearbetningshårdvara kan kompensera för dålig gränssnittsval, brister i signalintegritet eller icke-optimerad mekanisk design. Genom att följa fältprovade integrationsbästa praxis och samarbeta med en kameraleverantör som erbjuder förvaliderad hårdvara, stöd för referensdesigner samt plattformsoberoende programvaruverktyg minskar du antalet designiterationer, förkortar tid till marknaden och möjliggör konsekvent och kostnadseffektiv prestanda i volymproduktion för OEM:er.
För industriella kameramlösningar på kortnivå som är anpassade till ditt inbäddade vision-program, eller för att få tillgång till fullständiga referensdesignpaket, intern teknisk support och anpassade OEM-tillverkningstjänster (som erbjuds av HIFLY), samarbeta med en leverantör som har sitt ursprung i expertis inom industriell maskinvision. HIFLY:s 15 år av erfarenhet omfattar kameradesign på kortnivå, fullständig OEM/ODM-anpassning samt integrering av inbäddade visionsystem från ända till ända – stöttad av ISO 9001:2015-certifiering, global stöd för efterlevnad av regleringskrav och dedicerade design-in-teknikertjänster. Kontakta oss idag för en förpliktelsefri konsultation, anpassad prototypframställning eller för att optimera din arbetsflöde för integration av kameror på kortnivå.





