

Tillämpning av maskinseendesystem för att upptäcka fruktruttna
I den globala fruktleden är förluster efter skörd på grund av ruttna fortfarande en avgörande utmaning, där statistik visar att upp till 25 % av färsk frukt kasseras årligen på grund av odetekterad förruttnelse under sortering och lagring. Traditionella metoder för upptäckt av fruktruttna, som bygger på manuell inspektion, är inte bara arbetsintensiva och tidskrävande utan också benägna för mänskliga fel – särskilt när det gäller stora volymer av produkter eller tidiga stadier av ruttna som är svåra att se med blotta ögat. För att överkomma dessa begränsningar, maskinseendesystem (MVS) har framtränt som en omvandlande teknik som utnyttjar avancerad bildbehandling, datorseende och maskininlärningsalgoritmer för att möjliggöra snabb, noggrann och icke-destruktiv upptäckt av ruttna delar.
1. Tekniska grunder för systemet för maskinellt synkontroll
Projektets huvudmål är att utveckla ett system som automatiskt kan erfatta information om frukters yta, analysera visuella egenskaper kopplade till ruttna delar och klassificera frukter som "hela" eller "ruttna" med hög precision. Systemets arkitektur bygger på tre huvudkomponenter: bildhårdvara , moduler för bildförbearbetning , och algoritmer för klassificering av ruttna delar .
1.1 Installation av bildhårdvara
För att säkerställa omfattande datasamling använder projektet en plattform med flera sensorer för bildtagning, inklusive:
Högupplösta RGB-kameror : Spelar in färginformation, eftersom ruttna delar ofta visar sig som missfärgningar (till exempel bruna fläckar på äpplen, gråmögel på jordgubbar).

Nära-infraröda (NIR) kameror : Upptäcker inre förfall som kanske inte är synligt på ytan – till exempel kärnrot i päron eller brynskador som orsakar ruttnad hos persikor, vilket förändrar fruktens spektrala reflektans inom NIR-området.
Styrda belysningssystem : LED-paneler med justerbar intensitet och våglängd för att minimera skuggor, bländning och störningar från omgivande ljus, vilket säkerställer konsekvent bildkvalitet över olika fruktsorter (till exempel blanka körsbär jämfört med matta avokador).
1.2 Bildförbearbetning: Förbättra synligheten av egenskaper
Råbilder innehåller ofta brus (till exempel damm på fruktytor, ojämn belysning) som kan dölja egenskaper relaterade till ruttnad. Projektets förbehandlingspipeline inkluderar tre avgörande steg:
Bullerminskning : Tillämpning av Gaussisk filtrering för att jämna ut högfrekvent brus samtidigt som kantdetaljer i potentiella ruttnadsfläckar bevaras.
Omvandling av färgrymd : Omvandlar RGB-bilder till HSV-färgrymden (färgton-mättnad-värde), eftersom färgton- och mättnadskanaler är mer känsliga för färgförändringar orsakade av rut än de vanliga RGB-kanalerna. För NIR-bilder konverteras till gråskala och histogramutjämning används för att förbättra kontrasten mellan frisk och förruttnad vävnad.
Segmentering : Använder tröskelvärdesmetoder och kanterdetekteringsalgoritmer (t.ex. Canny-kantdetektor) för att isolera frukten från bakgrunden och segmentera potentiella rutfält. Till exempel kan ett tröskelvärde på färgtonskanalen identifiera bruna rutfläckar på gröna äpplen genom att skilja dem från fruktens friska gröna nyans.
2. Projekts arbetsflöde: Från fruktinmatning till sortering
Det maskinella visionssystemet fungerar som en integrerad del av en fruktpackningslinje och följer ett smidigt arbetsflöde:
Fruktinmatning : Frukter lastas på bandet, som transporterar dem till avbildningsstationen med en konstant hastighet (justerbar beroende på fruktstorlek, t.ex. 0,5 m/s för äpplen, 0,3 m/s för små jordgubbar).
Bildtagning : När en positionssensor upptäcker att en frukt kommer in i avbildningszonen tar RGB- och NIR-kamerorna 3–5 bilder av frukten från olika vinklar.
Realtidsbehandling : Förbearbetningspipelinen behandlar bilderna inom < 0,5 sekunder, och klassificeringsmodellen genererar en rotstatusförutsägelse (frisk/framåtskridande ruttna/tydligt ruttna) med ett konfidensvärde (t.ex. 98 % konfidens för tydlig ruttning).
Sorteringsåtgärd : Baserat på förutsägelsen skickar systemet ett signal till en pneumatisk aktuator eller robotarm i slutet av transportbandet. Friska frukter dirigeras till "packnings"-linjen, frukter med börjande ruttning skickas till en "kvalitetskontroll"-station för manuell omprövning (för att minimera falska positiva resultat), och frukter med tydlig ruttning leds till en "avfall"-behållare.
Dataloggning systemet registrerar varje frukts ID, bilder, klassificeringsresultat och konfidenspoäng i en molnbaserad databas. Dessa data används för att periodiskt träna om klassificeringsmodellen, vilket förbättrar noggrannheten ju mer data som samlas in.
3. Verkliga tillämpningar och prestanda: Fallstudier
3.1 Upptäckt av ruttnande äpplen
Noggrannhet systemet uppnådde en noggrannhet på 96,2 % vid upptäckt av ruttna (jämfört med 82,5 % hos manuella granskare), med en falsk positiv frekvens på endast 2,1 % (manuell granskning hade 7,8 % falska positiva).
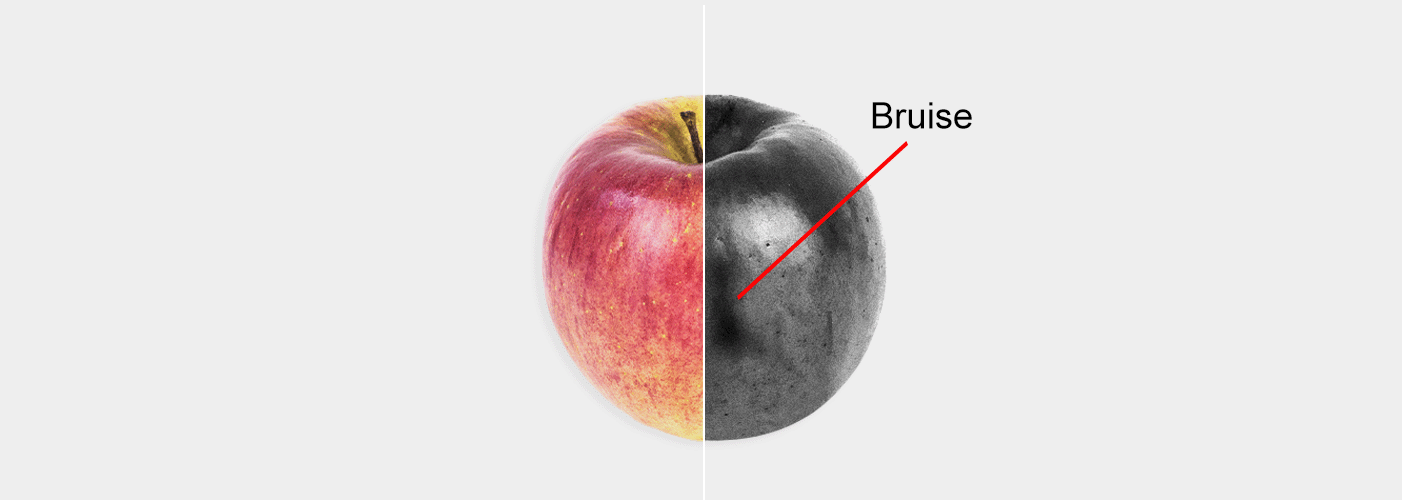
Hastighet systemet behandlade 120 äpplen per minut, jämfört med 40 äpplen per minut per manuell granskare – vilket minskade arbetskostnaderna med 67 %.
Tidig upptäckt nIR-kameran möjliggjorde upptäckt av inre kärtruttna i äpplen 5–7 dagar tidigare än manuell granskning, vilket tillät gårdar att sortera bort drabbade frukter innan ruttnan sprider sig under lagring.
3.2 Upptäckt av ruttnande jordgubbar
Utmaning jordgubbar är ömtåliga och benägna att få ytmycel (t.ex. Botrytis cinerea ) som ofta missas av manuella granskare på grund av liten storlek.

Resultat : Systemets högupplösta RGB-kameror och CNN-modell kunde upptäcka mögelfläckar så små som 2 mm i diameter, med en noggrannhet på 94,8 %. Detta minskade förlusterna efter skörd med 30 % jämfört med gårdens tidigare manuella sortering.
3.3 Upptäckt av mangorot
Utmaning : Mangon utvecklar ofta "stjälrots" som börjar vid stjälken (ett mindre synligt område vid manuell undersökning) och sprider sig inåt.
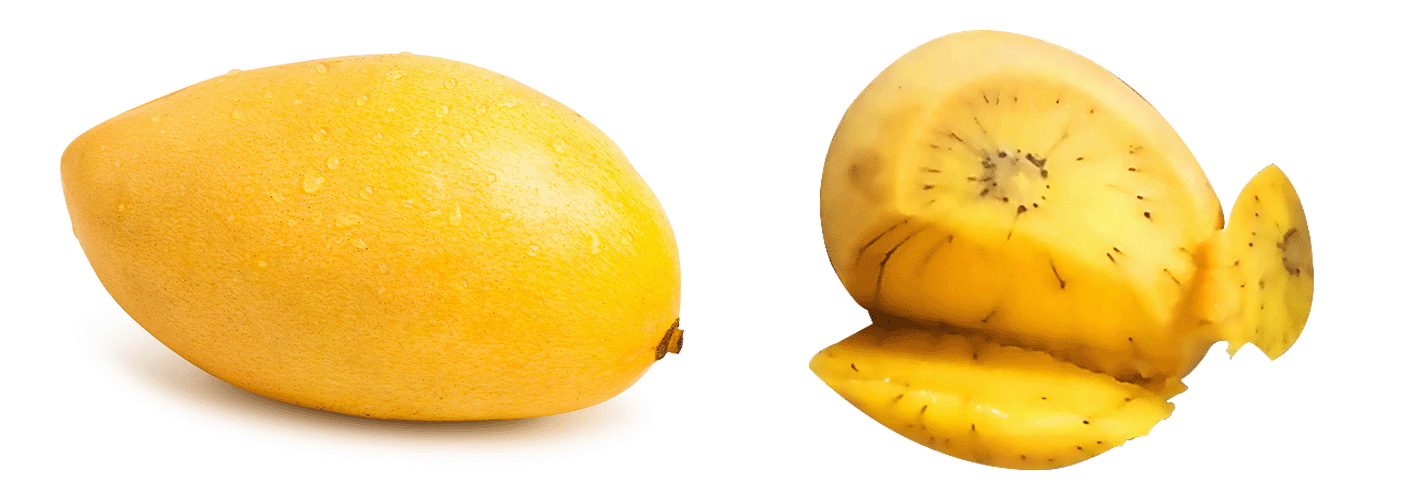
Resultat : Systemets avbildning från flera vinklar (inklusive en kamera underifrån fokuserad på stjälken) och NIR-analys upptäckte stjälrots med 95,5 % noggrannhet, vilket hjälpte paketeringsanläggningen att undvika avvisade leveranser till exportmarknader (där frukt utan rotskador är ett strikt krav).
4. Utmaningar och framtida riktningar
Även om projektet visat god prestanda finns flera utmaningar kvar att lösa:
Variation i fruktsorter : Den aktuella modellen presterar bäst på vanliga sorter men har svårt med sällsynta eller regionalt specifika frukter (t.ex. durian, litchi) på grund av begränsad träningsdata. Framtida arbete kommer att innefatta utvidgning av datamängden genom samarbete med globala gårdar.

Miljöstörningar : Fuktighet i förpackningsanläggningar kan orsaka kondens på kamerobjektiv, vilket påverkar bildkvaliteten. Projektgruppen utvecklar vattentäta kamerahus med antikondensbeläggning för att minska detta problem.
Kostnadsåtkomlighet : Den initiala installationskostnaden (≈ 50 000 USD för hårdvara och programvara) kan vara betungande för småskaliga gårdar. Framtida versioner kommer att fokusera på lågkostnadsalternativ, till exempel användning av smartphonekameror kopplade till edge-beräkningsenheter (t.ex. Raspberry Pi) för att minska kostnaderna med 60 %.
5. slutsats
Projektet med maskinseendesystem för upptäckt av fruktruttna representerar en paradigmförskjutning inom kvalitetskontroll efter skörd, vilket löser ineffektiviteter och begränsningar med manuell besiktning. Genom att kombinera avancerad bildbehandling, realtidsbildanalys och maskininlärning erbjuder systemet snabb, noggrann och icke-destruktiv detektering av ruttna frukter – vilket minskar förluster efter skörd, sänker arbetskostnader och säkerställer konsekvent fruktkvalitet för konsumenter. När tekniken utvecklas för att bli mer tillgänglig och anpassningsbar till olika fruktsorter har den potential att omvandla den globala fruktleveranskedjan, främja hållbarhet och livsmedelssäkerhet i en tid av ökad efterfrågan på färska produkter.





