

Skillnaden mellan areakameror och linjescanningskameror
Områdesscan-kameror och linscan-kameror har betydande skillnader i avbildningsprinciper, användningsfall m.m., enligt följande:
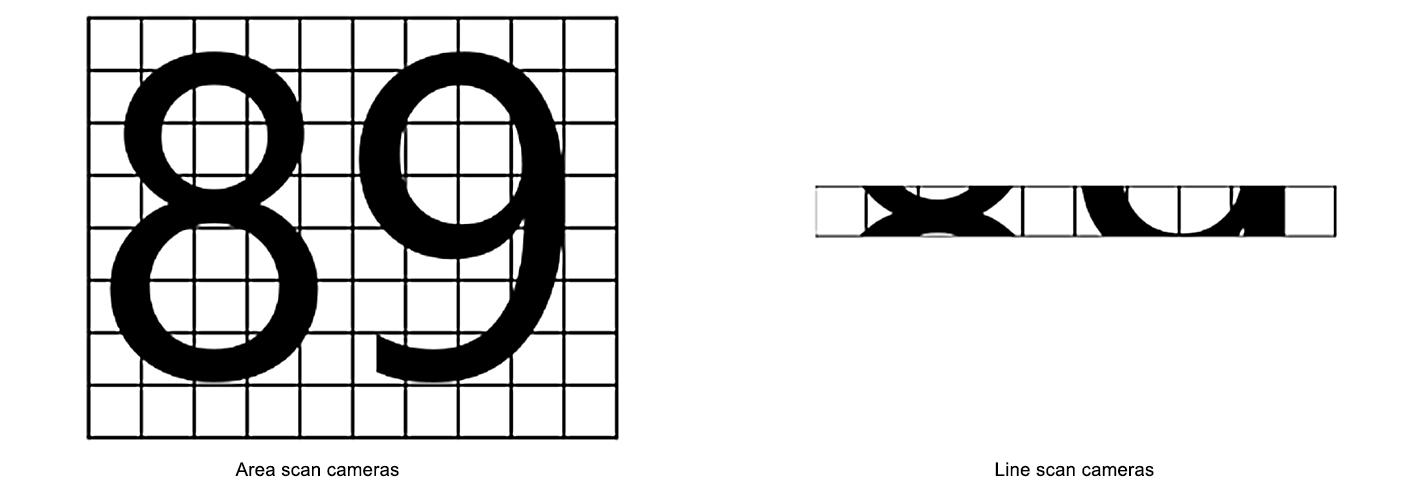
1. Kärnskillnader: Bildstruktur och metod
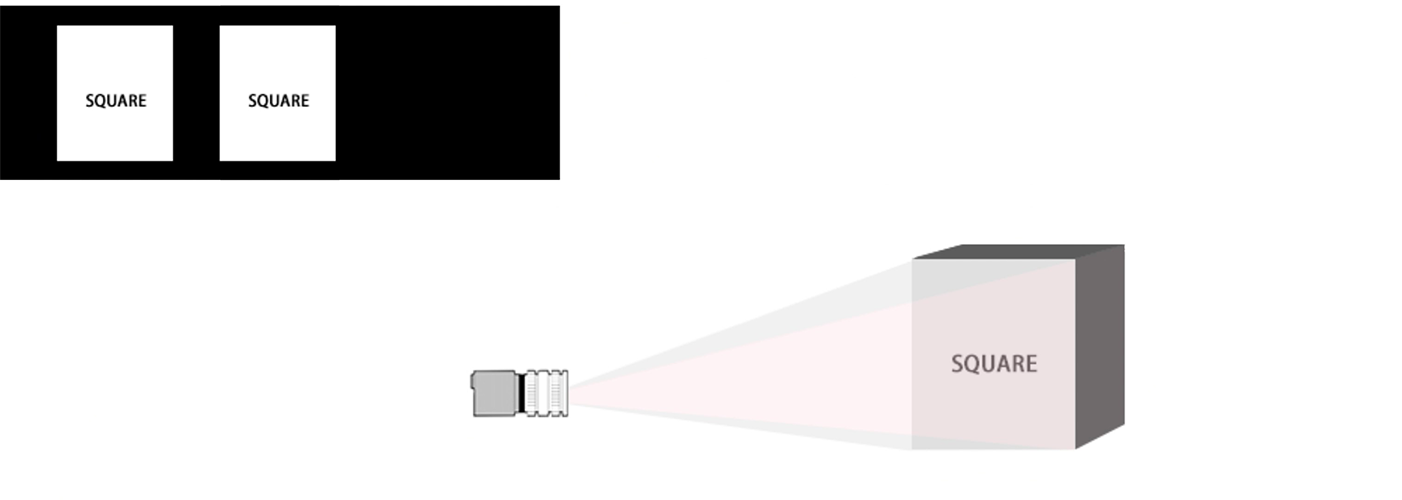
Area Scan-kamrar: Sensorn är en tvådimensionell yta (liknande en matris). En komplett tvådimensionell bild kan direkt fångas in med en enda exponering. Vanliga enheter som mobiltelefoner och systemkameror tillhör områdesscan-kameror.
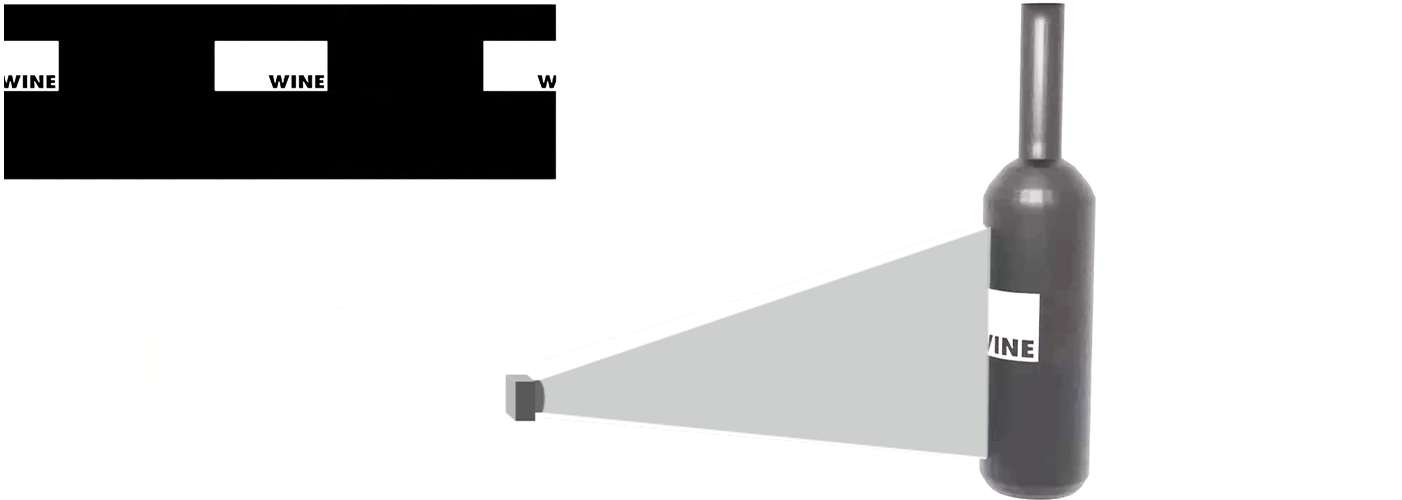
Linjeskanningskamrar: Sensorn är en linje (endimensionell array). Den måste samarbeta med objektets eller kamerans rörelse (t.ex. rörelse på en transportbana, kamera-scanning) för att ta bilder rad för rad och sedan sätta ihop dem till en tvådimensionell bild. Det är som att sopra golvet med en kvast, täck hela området genom rörelse.
2. Skillnader i användningsfall
Area Scan-kamrar: Lämplig för att fotografera stillastående objekt eller objekt med långsam rörelse, såsom ID-foton, stillastående produktinspektion, daglig fotografiering etc. Fördelen är enkel hantering och snabb hämtning av kompletta bilder.
Linjeskanningskamrar: Lämplig för att filma stora områden och snabbt rörliga objekt, såsom kontinuerlig inspektion av tyg och papper, väggenomskanning, kvalitetskontroll av tryckta produkter m.m. Fördelen är högre bildupplösning och tydligare detaljer i långa, smala eller kontinuerligt rörliga scenarier.
3. D ifferens i funktionsprinciper
Den grundläggande skillnaden i funktionsprincip mellan områdesvisande kameror och linjevisande kameror ligger i sensorns struktur och avbildningsmetod, enligt följande:
(1).Funktionsprincip för områdesvisande kameror
Sensorstruktur: Kärnan är en tvådimensionell områdesmatris-sensor (såsom CCD eller CMOS), som består av många pixlar som bildar en plan matris (liknande ett rutnät).
Avbildningsprocess: När bländaren öppnas belyser ljuset hela områdesarray-sensorn samtidigt genom objektivet. Varje pixel på sensorn tar emot ljus synkront och omvandlar det till elektriska signaler. Efter bearbetning genereras direkt en komplett tvådimensionell bild (inklusive information om bredd och höjd).
Egenskaper: Förvärvet av hela bilden kan slutföras med en enda exponering, utan att vara beroende av extern rörelse, och är lämplig för att fånga statiska eller långsamt rörliga objekt.
(2).Arbetsprincip för linjekamera
Sensorstruktur: Kärnan är en endimensionell linjearraysensor, där pixlarna är arrangerade i en rak linje (endast innehållande en rad pixlar).
Avbildningsprocess: Linjearraysensorn kan endast samla in bildinformation från en linje åt gången (endast med breddinformation). Den måste lita på objektets enhetliga rörelse (till exempel framdriven av en transportbana) eller kamerans egen skanningsrörelse för att sensorn ska kunna samla in linjebilder från olika positioner, linje för linje. Därefter sammanfogas dessa kontinuerliga linjebilder med hjälp av programvara för att slutligen bilda en komplett tvådimensionell bild (bredd + längd som skapas genom rörelse).
Egenskaper: Den förlitar sig på yttre rörelse i samarbete, är lämplig för avbildning av kontinuerliga, höghastighets- eller stora ytor, och kan behålla hög upplösning under rörelsen.
4. Andra viktiga skillnader
Upplösning och bildfrekvens: Linjescanningskameror har vanligtvis fler pixlar i en enda riktning och kan uppnå högupplöst avbildning med hög hastighet; areascanningskameror har mer flexibla bildhastigheter (antal bilder per sekund), vilket är lämpligt för att fånga in ögonblicksbilder.
Kostnad och komplexitet: Linjescanningskameror måste vara utrustade med rörelsekontrollenheter, så systemet är mer komplext och kostnaden är högre; systemskameror med ytscanning är enkla och kostnaden är relativt låg.





